









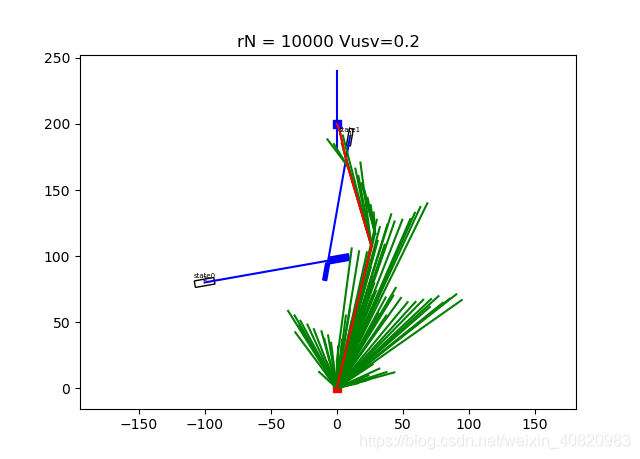
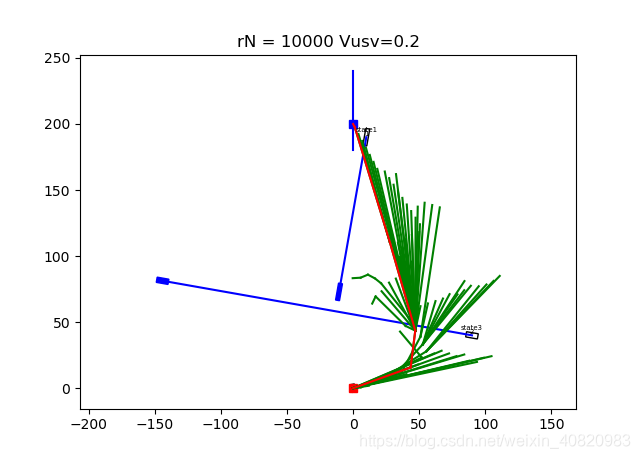
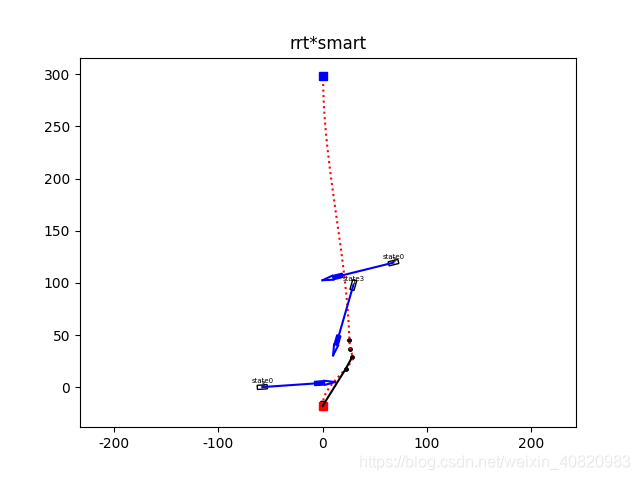
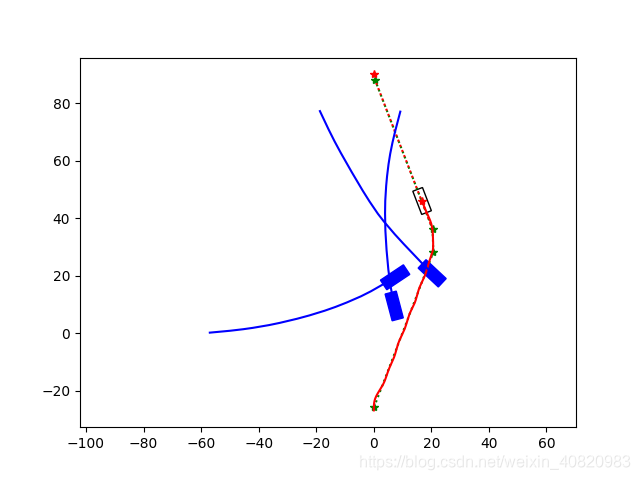
2021/05/26 增加rrt*-smart局部路径规划(动态避障,遵守COLREGS避碰规则)
关键词:rrt*-smart,dcpa,tcpa,COLREGS,船舶安全领域
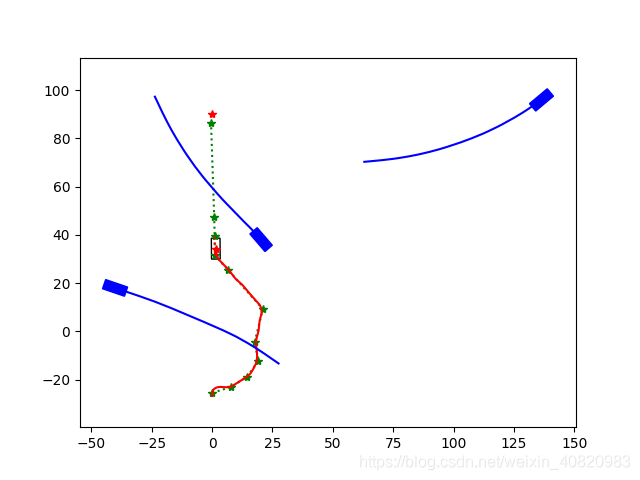
这里先展示结果,具体实现方法等我写完论文再发。(图中绿色线条是rrt*-smart随机树,蓝色线条是障碍船的行驶轨迹,红线是无人艇规划路径。)
最后赠送几张海边的美景


2020/12/7 实艇控制总体框架(代码就不传啦)
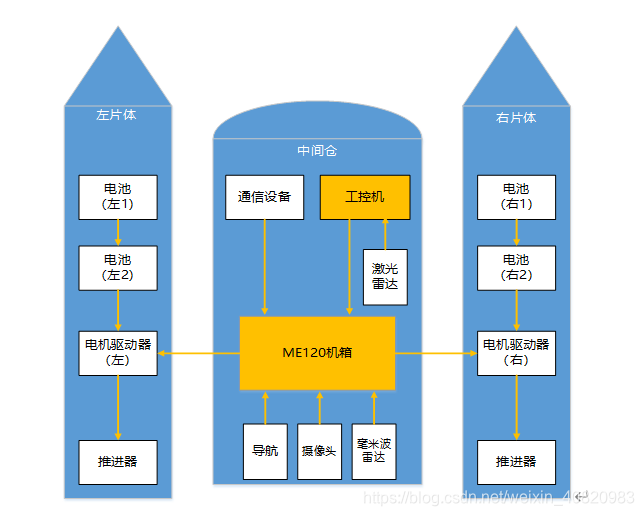
1、gps和激光雷达的数据接收、解析、处理、发布话题
2、 坐标系转换:LLA转ECEF,ECEF转ENU
3、根据LOS及障碍物位置计算目标航向
4、PID差速转向控制 及 原地转向
2020\11\16 更新:vrep仿真,ros\gps\imu\lidar
仿真环境:vrep最新版本(CoppeliaSim)、ros-kinetic、Ubuntu16.04、Python 2.7,仿真时记得先打开ros,再打开vrep,这样会自动加载vrep_ros interface插件。
两推进器船、有波浪的水面(改编自github某不知名环境)

跟踪结果:
(黑色为航向,init_vel 、max 、min 为pid中的基准推力、限幅推力,不是真实的速度,真实的船速从vrep传感器获得)
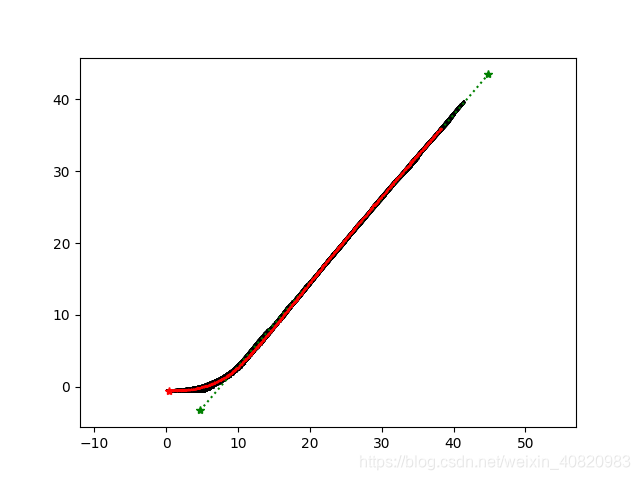
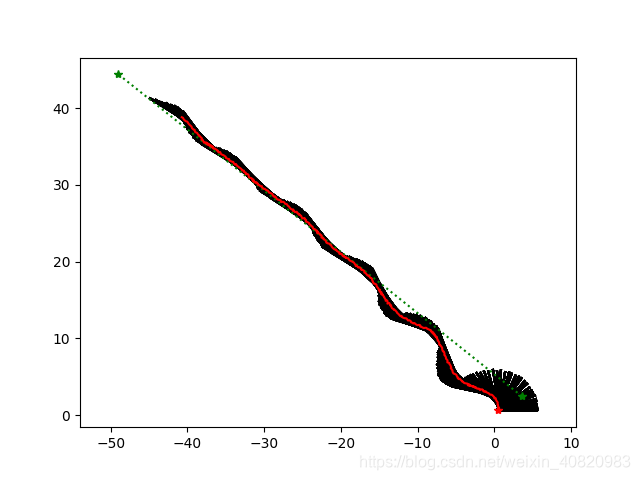
参数:init_vel=40.0_max=80.0_min=-80.0_P=15.0_I=3.0
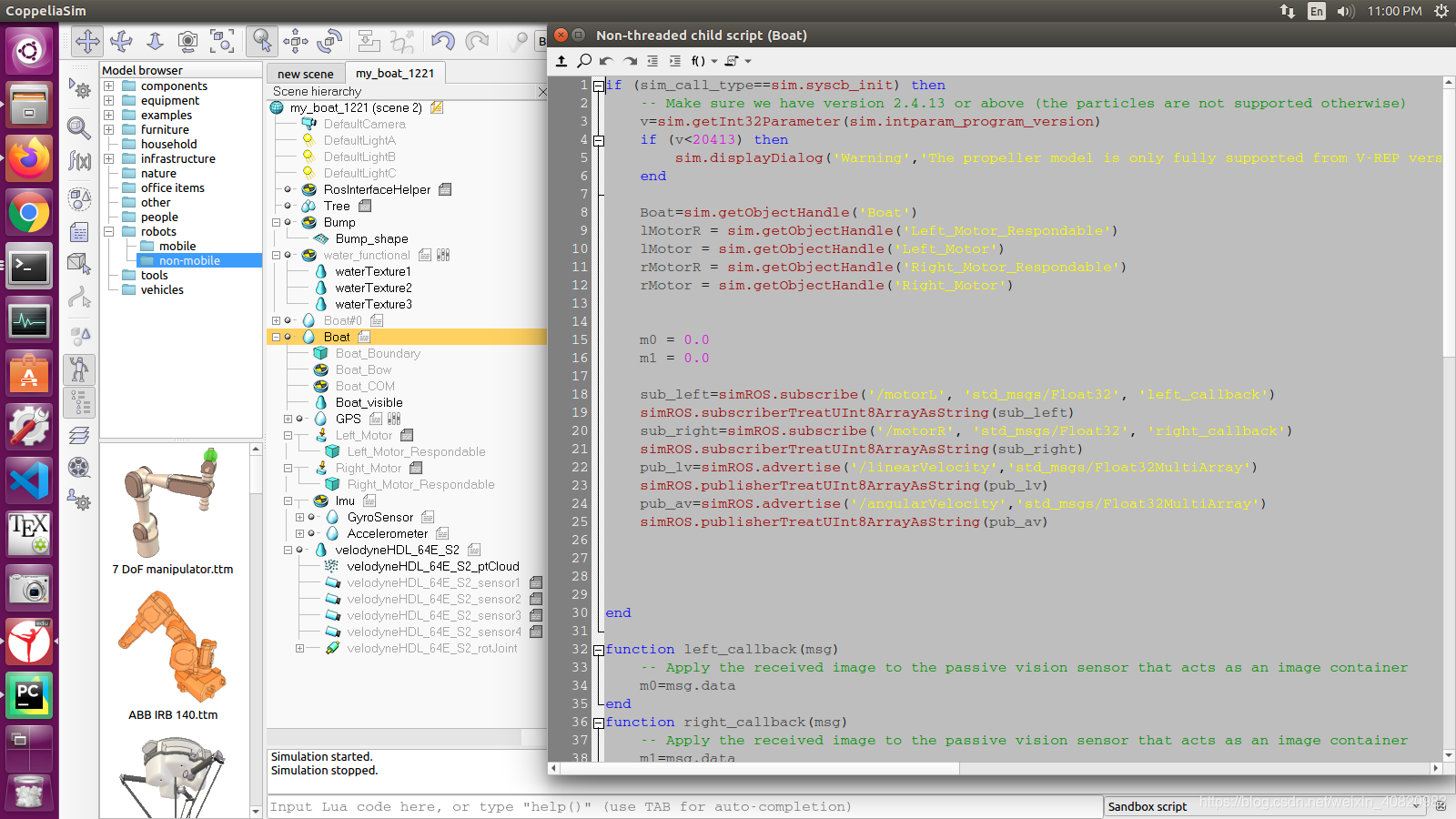
快捷获取物体信息的方式(vrep中的lua脚本):
--初始化一个multiarray的话题
pub_lv=simROS.advertise('/info','std_msgs/Float32MultiArray')
simROS.publisherTreatUInt8ArrayAsString(pub_lv)
--获取信息
pos1=sim.getObjectPosition(Boat,-1)
--xyz坐标
l_v1,a_v=sim.getObjectVelocity(Boat)
--线速度,角速度
angle1=sim.getObjectOrientation(Boat,-1)[3]
--方位角 (-pi到pi)
--将信息打包成一维数组,lua下标从1开始
data_all={}
data_all[1]=angle1
data_all[2]=pos1[1]
data_all[3]=pos1[2]
...
--发布话题
simROS.publish(pub_lv, {data=data_all})
控制量:两推进器的力的大小,基于差速模型的pid控制
坐标系:
1、仿真环境中有一个世界坐标系,所有位置信息都是基于这个世界坐标系的。gps发送的位置是在环境中的(x,y,z)。
2、船的航向角,从x轴正方向逆时针为正顺时针为负,范围为(-pi,pi)。
ROS信息传输:
1、先打开ros再打开vrep,自动加载ros插件后,执行命令 rosnode list会发现有一个 sim_ros_interface的节点,这样我们在vrep环境中发送的消息都是基于这个节点。
发布话题有imu、角速度、线速度、gps(x,y,z)、激光雷达点云;订阅话题:左右电机的推力

2、在vrep界面中,双击每个名字后面的小文档(child_script),会出现该物体的lua执行代码。vrep端发送的话题主要有 gps_data,imu_data 等,主要在Boat、GPS 这三个物体的文档里。
3、在vrep中使用ros,参考了vrep自带的ros例程。发布话题:初始化话题(simRos.advertise),发布话题信息(simros.publish),shutdown。订阅话题: 初始化话题(simRos.subscribe),回调函数(自定义call_back)
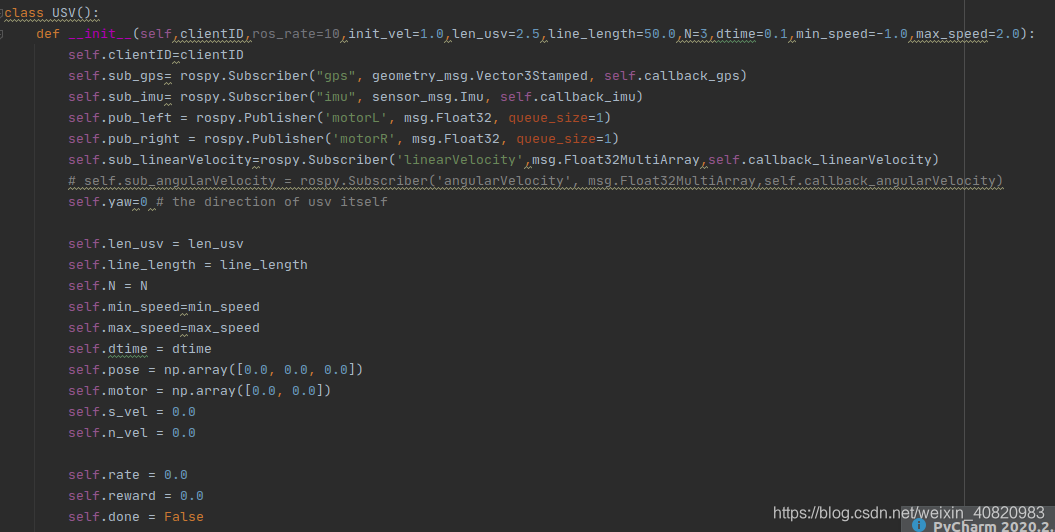
usv_ros.py 代码解析:
1、初始化ros话题、目标位置、pid参数等
2、订阅话题的回调函数
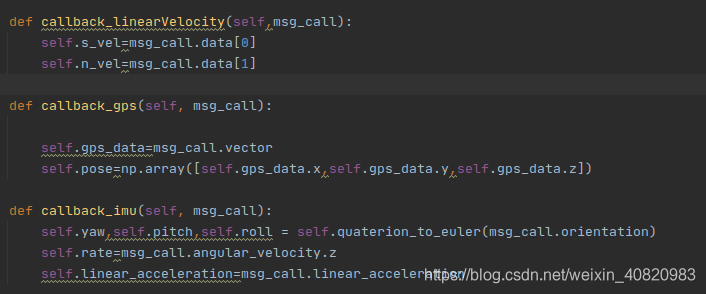
将四元数转化为欧拉角:

3、计算无人艇当前航向与目标航向的角度差。
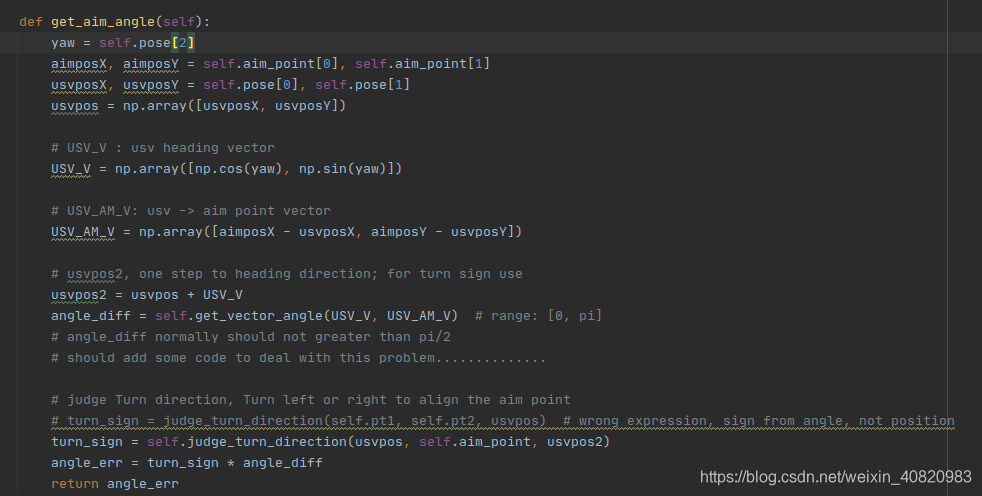
向量夹角的计算
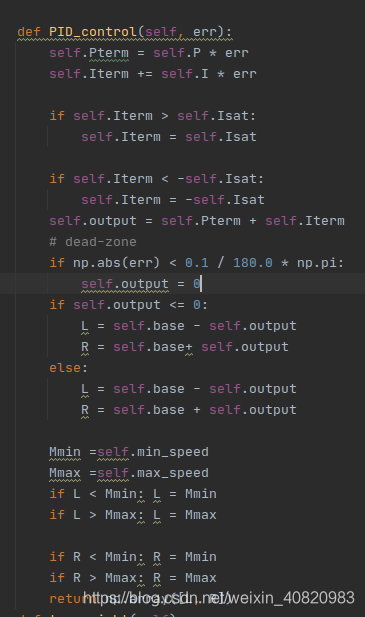
4、pid差速,基础速度base_vel
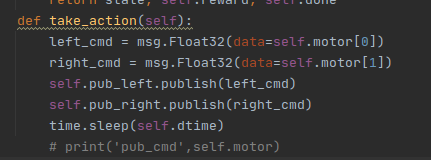
5、发送话题:左右电机推力
5、主程序中需要初始化ros节点和vrep 连接id

vrep model 下载链接:my_boat_1221.ttt-机器学习文档类资源-CSDN下载
注意:使用激光雷达的话,将链接https://github.com/edward0im/V-Rep-Autonomous-Vehicle-Simulator里的so文件放到vrep文件夹下。
2020\10\20
1、找到几个不错的仿真环境,但搭建过程可能会比较费时:
基于java:https://github.com/He-Ze/Autonomous-Surface-Vehicle-Simulator
基于gazebo,试了两天各种报错不能运行:https://github.com/disaster-robotics-proalertas/usv_sim_lsa
一个无人艇比赛的官方仿真环境,基于gazebo ubuntu18.04 https://github.com/osrf/vrx
这个可运行,但是模型写的不对,船跑不了!!!https://github.com/OUXT-Polaris/ros_ship_packages
2、卡尔曼滤波
协方差矩阵kalman滤波理解三:协方差矩阵的计算_JK-CSDN博客_误差协方差矩阵 卡尔曼滤波中的噪声协方差矩阵(R和Q)应该怎么取值,和噪声分布之间的关系是什么? - 知乎

















 393
393

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









