






在工业控制中,由步进电机、伺服电机、直线电机驱动的结构是很常见的,在很多系统中我们都会碰到已知A点到B点的距离Distance,允许最大耗时T(max),系统的最大速度V(max)和最大加速A(max),求出S型运动曲线系统实际需要使速度V(s),加速度A(s),加加速度J(s)或者T型运动曲线系统实际需要的时间。这就涉及到电机速度曲线规划的问题。我简单编写一个用于电机点到点T型、S型运动曲线规划的小软件。
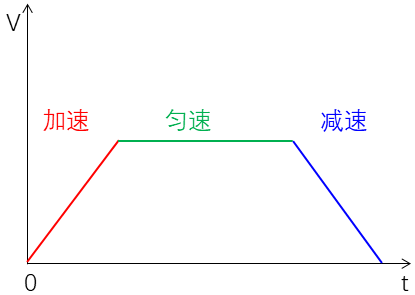
T形:加速 -》 匀速 -》 减速
T型运动曲线
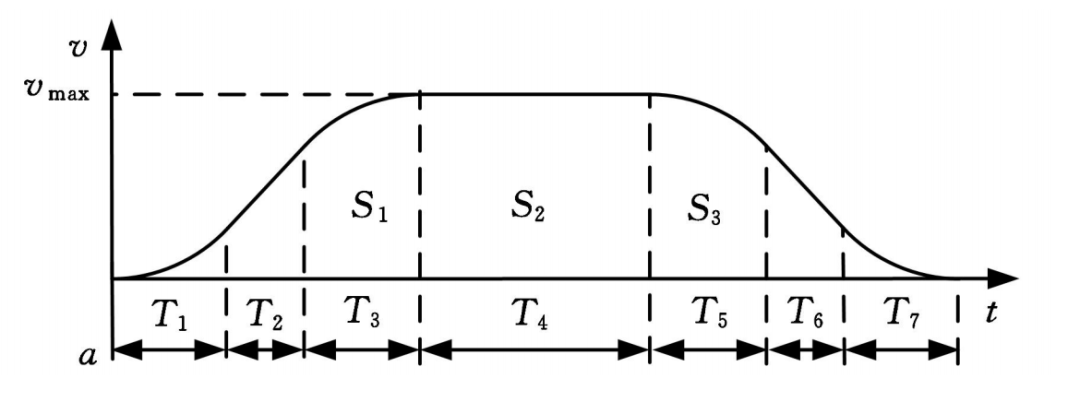
S形:加加速() -》 匀加速() -》 减加速()-》 匀速()-》 加减速()-》 匀减速()-》 减减速()
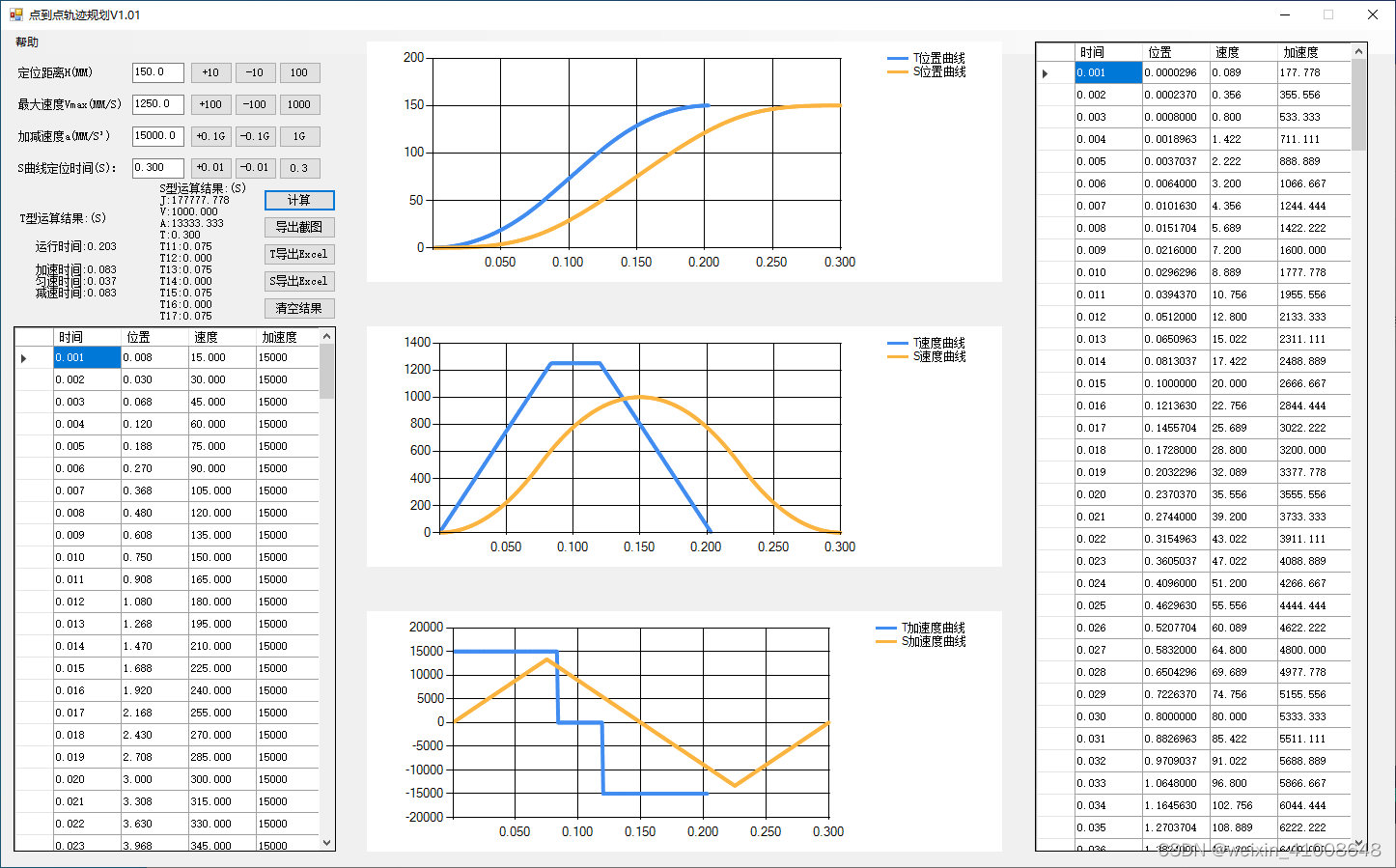
以下就是我制作的小软件,用于电机点到点T型、S型运动曲线规划。
输入 定位距离,最大速度,加速度,S曲线定位时间(使用S型运动曲线规划时)即可规划T型、S型运动曲线。
下载地址:
链接:pan.baidu.com/s/1nzE631z1K8nQFBDRUkoM2g?pwd=zhlq 密码:zhlq
曲线规划的核心代码如下
vf = Math.Sqrt((2 * aa * aa * h ) / (2*aa));
if (vf > vmax)
{
vv = vmax;
}
else
{
vv = vf;
}
Ta = (vv - v0) / aa;
La = v0 * Ta + 1.0 / 2.0 * aa * Ta * Ta;
Td = (v1 - vv) / -aa;
Ld = vv * Td + 1.0 / 2.0 * -aa * Td * Td;
Tv = (h - La - Ld) / vv;
Lv = (h - La - Ld);
Tt = Ta + Td + Tv; //T型定位耗时
if (Ts> Tt)
{
v2 = h/Ts*coefficient1;
a2 = v2 / Ts * coefficient2;
if (a2 > aa)
{
a2 = aa;
}
if (v2> vv)
{
v2 = vv;
}
Jerk = (a2 * a2 * v2) / (v2 * a2 * Ts - v2 * v2 - h * a2);
T11 = a2 / Jerk;
T12 = v2 / a2 - a2 / Jerk;
T13 = T11;
T15 = T11;
T16 = T12;
T17 = T11;
T14 = Ts - (4 * T11) - (2 * T12);
sTd = T15 + T16 + T17; //S型定位耗时
















 593
593

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









