






舵机的联调
买个模拟舵机,网上好多例子,换了好几个才拼凑明白,所以记录一下,方便查看。看别人的文章终究只能想象,还是自己做一遍,让舵机动起来,才能发自内心的高兴。
主要参考了他的:
STM32-通行闸机2(HAL库)
ES08A 模拟电机,褐色:GND;红色:电源+5V;黄色信号线
黄色信号会根据PWM占空比调整位置。
舵机的控制一般需要一个20ms左右的时基脉冲
0.5ms 0度;
1.0ms 45度;
1.5ms 90度;
2.0ms 135度;
2.5ms 180度;
注意:烧录线一根或数据线一根,电压都不够,所以插两根线,才能让舵机动起来

配置PWM时候,分频要分一个20ms内的变化的占空比,就可以控制位置了
首先开通串口DMA:

模式是异步

全局中断要打开
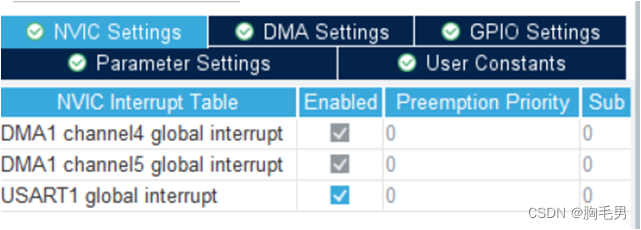
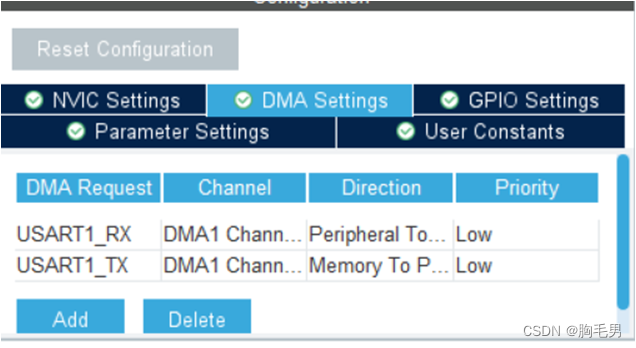
添加DMA,收发都添加
波特率设置9600

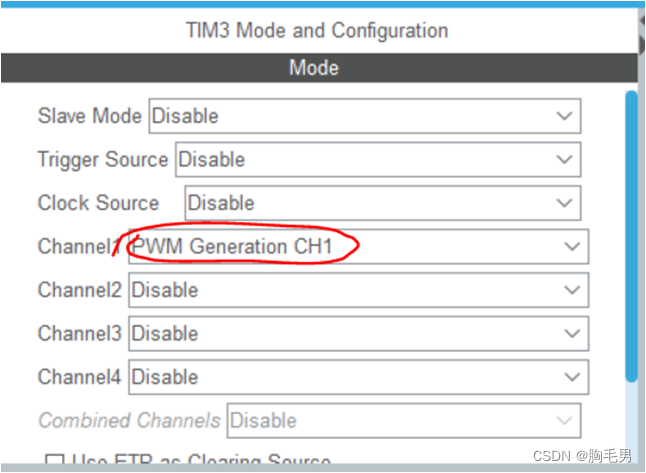
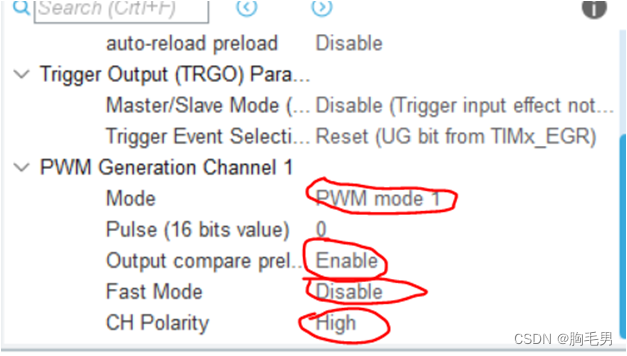
在Timers里设置PWM

在Channel1里头选PWM产生CH1
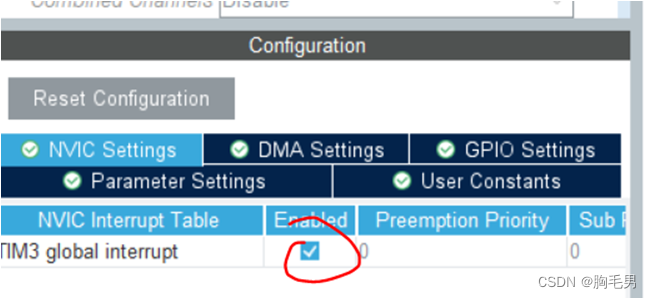
在NVIC设置里,全局打勾
在参数设置里写分频
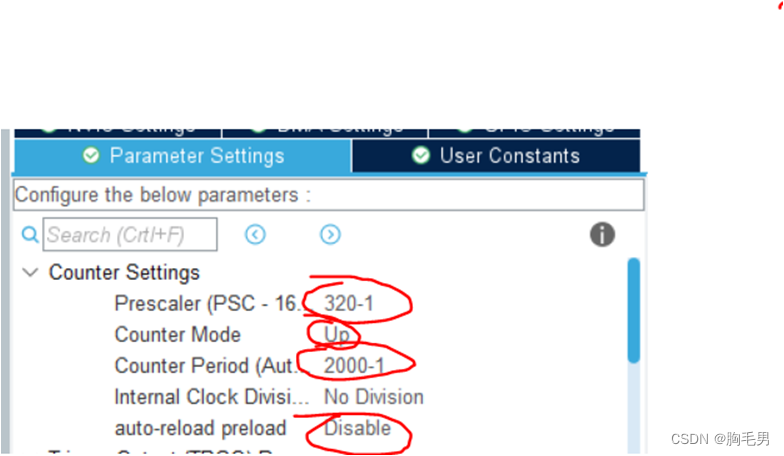
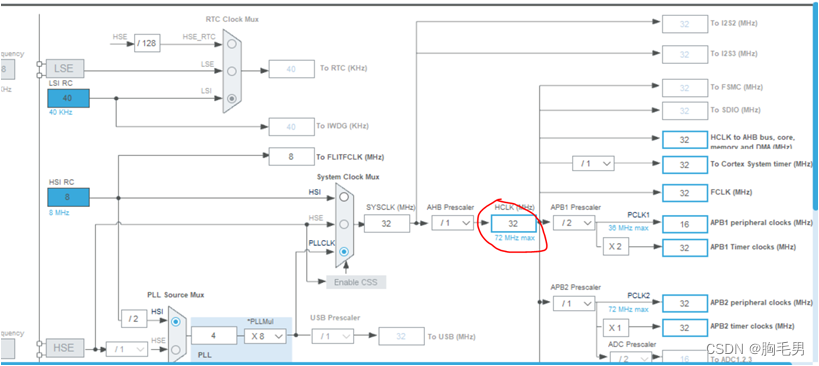
总频率是32MHz,32*10^6
Prescaler写320-1,这样32e6/320 = 1e5Hz,所以周期1e-5s,
配置定时器时,预分频值和period值都要减1,可以确保计时时间准确
Counter Mode上沿检测
Counter Period写2000-1
舵机要20毫秒,20e-3s ,2e-2s, 2e-2/1e-5 = 2000份儿,所以设置2000
auto-reload 不打开。。。不知道为啥,后边都不知道为啥
总频率32M
开发环境选MDK-arm,之后就生成
//PWM初始化时,开启中断
HAL_TIM_PWM_Start_IT(&htim3, TIM_CHANNEL_1);
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim3;
UART_HandleTypeDef huart1;
UART_HandleTypeDef huart2;
UART_HandleTypeDef huart3;
DMA_HandleTypeDef hdma_usart1_rx;
DMA_HandleTypeDef hdma_usart1_tx;
DMA_HandleTypeDef hdma_usart2_rx;
DMA_HandleTypeDef hdma_usart2_tx;
DMA_HandleTypeDef hdma_usart3_rx;
DMA_HandleTypeDef hdma_usart3_tx;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_DMA_Init(void);
static void MX_USART1_UART_Init(void);
static void MX_USART2_UART_Init(void);
static void MX_USART3_UART_Init(void);
static void MX_TIM3_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
uint8_t Stateee=1;
const uint8_t buffersize=10;
uint8_t buffer3[buffersize]; // 3收
uint8_t buffer2[buffersize]; // 2收
uint8_t buffer1[buffersize]; // 1收
#include "string.h"
uint16_t angle;
void Angle_Control(uint16_t angle)
{
uint16_t pulse;
pulse=500+(int)(angle*100/9);
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,pulse);
}
/*
** Rewrite fputc function and make printf function work
**/
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
MX_USART2_UART_Init();
MX_USART3_UART_Init();
MX_TIM3_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start_IT(&htim3, TIM_CHANNEL_1);
HAL_UART_Receive_DMA(&huart3,buffer3,buffersize);
__HAL_UART_ENABLE_IT(&huart3,UART_IT_IDLE);
HAL_UART_Receive_DMA(&huart2,buffer2,buffersize);
__HAL_UART_ENABLE_IT(&huart2,UART_IT_IDLE);
HAL_UART_Receive_DMA(&huart1,buffer1,buffersize);
__HAL_UART_ENABLE_IT(&huart1,UART_IT_IDLE);
//__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,50); //0度 1/20 * 200
// HAL_Delay(1000);
Stateee = 2;
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,57); //45度 1/20 * 200
// HAL_Delay(1000);
//i=i+div;
// if(i>=250)
// {
// div = -50;
// }
// else if(i<=50)
// {
// div = 50;
// }
//if(Stateee==1)
//{
// __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,150); //0
//}
//else if(Stateee==2)
//{
// __HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,130); //0
//}
HAL_Delay(1000);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI_DIV2;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL8;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_1) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief TIM3 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM3_Init(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 320-1;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 2000-1;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM3_Init 2 */
/* USER CODE END TIM3_Init 2 */
HAL_TIM_MspPostInit(&htim3);
}
/**
* @brief USART1 Initialization Function
* @param None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 9600;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/**
* @brief USART2 Initialization Function
* @param None
* @retval None
*/
static void MX_USART2_UART_Init(void)
{
/* USER CODE BEGIN USART2_Init 0 */
/* USER CODE END USART2_Init 0 */
/* USER CODE BEGIN USART2_Init 1 */
/* USER CODE END USART2_Init 1 */
huart2.Instance = USART2;
huart2.Init.BaudRate = 9600;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART2_Init 2 */
/* USER CODE END USART2_Init 2 */
}
/**
* @brief USART3 Initialization Function
* @param None
* @retval None
*/
static void MX_USART3_UART_Init(void)
{
/* USER CODE BEGIN USART3_Init 0 */
/* USER CODE END USART3_Init 0 */
/* USER CODE BEGIN USART3_Init 1 */
/* USER CODE END USART3_Init 1 */
huart3.Instance = USART3;
huart3.Init.BaudRate = 9600;
huart3.Init.WordLength = UART_WORDLENGTH_8B;
huart3.Init.StopBits = UART_STOPBITS_1;
huart3.Init.Parity = UART_PARITY_NONE;
huart3.Init.Mode = UART_MODE_TX_RX;
huart3.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart3.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart3) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART3_Init 2 */
/* USER CODE END USART3_Init 2 */
}
/**
* Enable DMA controller clock
*/
static void MX_DMA_Init(void)
{
/* DMA controller clock enable */
__HAL_RCC_DMA1_CLK_ENABLE();
/* DMA interrupt init */
/* DMA1_Channel2_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Channel2_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel2_IRQn);
/* DMA1_Channel3_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Channel3_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel3_IRQn);
/* DMA1_Channel4_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Channel4_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel4_IRQn);
/* DMA1_Channel5_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Channel5_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel5_IRQn);
/* DMA1_Channel6_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Channel6_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel6_IRQn);
/* DMA1_Channel7_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Channel7_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel7_IRQn);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
stm32f1xx_it.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file stm32f1xx_it.c
* @brief Interrupt Service Routines.
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f1xx_it.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "string.h"
#include <stdio.h>
#include <math.h>
#include <stdlib.h>
extern uint8_t Stateee;
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN TD */
/* USER CODE END TD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
const uint8_t buffersize2=10;
extern uint8_t buffer1[buffersize2];
extern uint8_t buffer2[buffersize2];
extern uint8_t buffer3[buffersize2];
int fputc(int ch, FILE *f)
{
/* 堵塞判断串口是否发送完成 */
while((USART1->SR & 0X40) == RESET);
/* 串口发送完成,将该字符发送 */
USART1->DR = (uint8_t)ch;
return ch;
}
/* USER CODE END 0 */
/* External variables --------------------------------------------------------*/
extern TIM_HandleTypeDef htim3;
extern DMA_HandleTypeDef hdma_usart1_rx;
extern DMA_HandleTypeDef hdma_usart1_tx;
extern DMA_HandleTypeDef hdma_usart2_rx;
extern DMA_HandleTypeDef hdma_usart2_tx;
extern DMA_HandleTypeDef hdma_usart3_rx;
extern DMA_HandleTypeDef hdma_usart3_tx;
extern UART_HandleTypeDef huart1;
extern UART_HandleTypeDef huart2;
extern UART_HandleTypeDef huart3;
/* USER CODE BEGIN EV */
/* USER CODE END EV */
/******************************************************************************/
/* Cortex-M3 Processor Interruption and Exception Handlers */
/******************************************************************************/
/**
* @brief This function handles Non maskable interrupt.
*/
void NMI_Handler(void)
{
/* USER CODE BEGIN NonMaskableInt_IRQn 0 */
/* USER CODE END NonMaskableInt_IRQn 0 */
/* USER CODE BEGIN NonMaskableInt_IRQn 1 */
while (1)
{
}
/* USER CODE END NonMaskableInt_IRQn 1 */
}
/**
* @brief This function handles Hard fault interrupt.
*/
void HardFault_Handler(void)
{
/* USER CODE BEGIN HardFault_IRQn 0 */
/* USER CODE END HardFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_HardFault_IRQn 0 */
/* USER CODE END W1_HardFault_IRQn 0 */
}
}
/**
* @brief This function handles Memory management fault.
*/
void MemManage_Handler(void)
{
/* USER CODE BEGIN MemoryManagement_IRQn 0 */
/* USER CODE END MemoryManagement_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_MemoryManagement_IRQn 0 */
/* USER CODE END W1_MemoryManagement_IRQn 0 */
}
}
/**
* @brief This function handles Prefetch fault, memory access fault.
*/
void BusFault_Handler(void)
{
/* USER CODE BEGIN BusFault_IRQn 0 */
/* USER CODE END BusFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_BusFault_IRQn 0 */
/* USER CODE END W1_BusFault_IRQn 0 */
}
}
/**
* @brief This function handles Undefined instruction or illegal state.
*/
void UsageFault_Handler(void)
{
/* USER CODE BEGIN UsageFault_IRQn 0 */
/* USER CODE END UsageFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_UsageFault_IRQn 0 */
/* USER CODE END W1_UsageFault_IRQn 0 */
}
}
/**
* @brief This function handles System service call via SWI instruction.
*/
void SVC_Handler(void)
{
/* USER CODE BEGIN SVCall_IRQn 0 */
/* USER CODE END SVCall_IRQn 0 */
/* USER CODE BEGIN SVCall_IRQn 1 */
/* USER CODE END SVCall_IRQn 1 */
}
/**
* @brief This function handles Debug monitor.
*/
void DebugMon_Handler(void)
{
/* USER CODE BEGIN DebugMonitor_IRQn 0 */
/* USER CODE END DebugMonitor_IRQn 0 */
/* USER CODE BEGIN DebugMonitor_IRQn 1 */
/* USER CODE END DebugMonitor_IRQn 1 */
}
/**
* @brief This function handles Pendable request for system service.
*/
void PendSV_Handler(void)
{
/* USER CODE BEGIN PendSV_IRQn 0 */
/* USER CODE END PendSV_IRQn 0 */
/* USER CODE BEGIN PendSV_IRQn 1 */
/* USER CODE END PendSV_IRQn 1 */
}
/**
* @brief This function handles System tick timer.
*/
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
/******************************************************************************/
/* STM32F1xx Peripheral Interrupt Handlers */
/* Add here the Interrupt Handlers for the used peripherals. */
/* For the available peripheral interrupt handler names, */
/* please refer to the startup file (startup_stm32f1xx.s). */
/******************************************************************************/
/**
* @brief This function handles DMA1 channel2 global interrupt.
*/
void DMA1_Channel2_IRQHandler(void)
{
/* USER CODE BEGIN DMA1_Channel2_IRQn 0 */
/* USER CODE END DMA1_Channel2_IRQn 0 */
HAL_DMA_IRQHandler(&hdma_usart3_tx);
/* USER CODE BEGIN DMA1_Channel2_IRQn 1 */
/* USER CODE END DMA1_Channel2_IRQn 1 */
}
/**
* @brief This function handles DMA1 channel3 global interrupt.
*/
void DMA1_Channel3_IRQHandler(void)
{
/* USER CODE BEGIN DMA1_Channel3_IRQn 0 */
/* USER CODE END DMA1_Channel3_IRQn 0 */
HAL_DMA_IRQHandler(&hdma_usart3_rx);
/* USER CODE BEGIN DMA1_Channel3_IRQn 1 */
/* USER CODE END DMA1_Channel3_IRQn 1 */
}
/**
* @brief This function handles DMA1 channel4 global interrupt.
*/
void DMA1_Channel4_IRQHandler(void)
{
/* USER CODE BEGIN DMA1_Channel4_IRQn 0 */
/* USER CODE END DMA1_Channel4_IRQn 0 */
HAL_DMA_IRQHandler(&hdma_usart1_tx);
/* USER CODE BEGIN DMA1_Channel4_IRQn 1 */
/* USER CODE END DMA1_Channel4_IRQn 1 */
}
/**
* @brief This function handles DMA1 channel5 global interrupt.
*/
void DMA1_Channel5_IRQHandler(void)
{
/* USER CODE BEGIN DMA1_Channel5_IRQn 0 */
/* USER CODE END DMA1_Channel5_IRQn 0 */
HAL_DMA_IRQHandler(&hdma_usart1_rx);
/* USER CODE BEGIN DMA1_Channel5_IRQn 1 */
/* USER CODE END DMA1_Channel5_IRQn 1 */
}
/**
* @brief This function handles DMA1 channel6 global interrupt.
*/
void DMA1_Channel6_IRQHandler(void)
{
/* USER CODE BEGIN DMA1_Channel6_IRQn 0 */
/* USER CODE END DMA1_Channel6_IRQn 0 */
HAL_DMA_IRQHandler(&hdma_usart2_rx);
/* USER CODE BEGIN DMA1_Channel6_IRQn 1 */
/* USER CODE END DMA1_Channel6_IRQn 1 */
}
/**
* @brief This function handles DMA1 channel7 global interrupt.
*/
void DMA1_Channel7_IRQHandler(void)
{
/* USER CODE BEGIN DMA1_Channel7_IRQn 0 */
/* USER CODE END DMA1_Channel7_IRQn 0 */
HAL_DMA_IRQHandler(&hdma_usart2_tx);
/* USER CODE BEGIN DMA1_Channel7_IRQn 1 */
/* USER CODE END DMA1_Channel7_IRQn 1 */
}
/**
* @brief This function handles TIM3 global interrupt.
*/
void TIM3_IRQHandler(void)
{
/* USER CODE BEGIN TIM3_IRQn 0 */
/* USER CODE END TIM3_IRQn 0 */
HAL_TIM_IRQHandler(&htim3);
/* USER CODE BEGIN TIM3_IRQn 1 */
/* USER CODE END TIM3_IRQn 1 */
}
/**
* @brief This function handles USART1 global interrupt.
*/
void USART1_IRQHandler(void)
{
/* USER CODE BEGIN USART2_IRQn 0 */
if(__HAL_UART_GET_FLAG(&huart1,UART_FLAG_IDLE)!= RESET)
{
//清除空闲标志位
__HAL_UART_CLEAR_IDLEFLAG(&huart1);
HAL_UART_DMAStop(&huart1);
uint8_t len = buffersize2-__HAL_DMA_GET_COUNTER(huart1.hdmarx);
HAL_UART_Receive_DMA(&huart1,buffer1,buffersize2);
//HAL_UART_Transmit_DMA(&huart1,buffer1,buffersize2);
uint16_t i=0;
uint8_t temp=0;
int temop=0;
uint8_t tempCou=0;
for(i=0;i<len;++i)
{
temp=buffer1[i]-0x30;
tempCou = len-i-1;
while(tempCou--)
{
temp=temp*10;
}
temop+=temp;
}
printf("%d",temop);
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,temop);
memset(buffer1,'\0',buffersize2);
}
/* USER CODE END USART2_IRQn 0 */
HAL_UART_IRQHandler(&huart1);
/* USER CODE BEGIN USART2_IRQn 1 */
/* USER CODE END USART2_IRQn 1 */
}
/**
* @brief This function handles USART2 global interrupt.
*/
void USART2_IRQHandler(void)
{
/* USER CODE BEGIN USART2_IRQn 0 */
if(__HAL_UART_GET_FLAG(&huart2,UART_FLAG_IDLE)!= RESET)
{
//清除空闲标志位
__HAL_UART_CLEAR_IDLEFLAG(&huart2);
HAL_UART_DMAStop(&huart2);
uint8_t len = buffersize2-__HAL_DMA_GET_COUNTER(huart2.hdmarx);
//HAL_UART_Transmit_DMA(&huart1,buffer2,len);
HAL_UART_Receive_DMA(&huart2,buffer2,buffersize2);
if(buffer2[0]=='1')
{
Stateee=1;
//__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,170); //0
}
else if(buffer2[0]=='2')
{
Stateee=2;
//__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,130); //0
}
memset(buffer2,'\0',buffersize2);
}
/* USER CODE END USART2_IRQn 0 */
HAL_UART_IRQHandler(&huart2);
/* USER CODE BEGIN USART2_IRQn 1 */
/* USER CODE END USART2_IRQn 1 */
}
/**
* @brief This function handles USART3 global interrupt.
*/
void USART3_IRQHandler(void)
{
/* USER CODE BEGIN USART3_IRQn 0 */
/* USER CODE END USART3_IRQn 0 */
HAL_UART_IRQHandler(&huart3);
/* USER CODE BEGIN USART3_IRQn 1 */
/* USER CODE END USART3_IRQn 1 */
}
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
注意这里,设置占空比
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,150); //0度 1/20 * 200
对于0度,0.5/20=0.025,0.025*2000 = 50
但是实际上56比较好
电机正立,最右边是0度,立起来是90度,最左边是180度
56:0度

100:45度

150:90度

程序安排USART1是串口与上位机串口助手通讯,上位机发送数据直接控制PWM脉冲数
重写了printf,所以
这样在串口助手里写 50,150 ,250,就可以控制舵机摆动到在0到180度的位置了。


















 2732
2732

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











