







 本文详细介绍了如何使用Vivado设计自定义IP进行DDR的读写操作,通过AXI总线接口实现数据传输,并在SDK中编写C代码进行读写测试。开发环境为Vivado18.3和PYNQ-Z2开发板。在硬件平台上,设计了按键消抖模块以消除按键抖动对读写操作的影响。在SDK中,通过主函数读取DDR中的数据并显示,实现了数据的读取验证。此外,还展示了如何进行硬件调试,包括ILA调试和波形分析,以辅助问题排查。
本文详细介绍了如何使用Vivado设计自定义IP进行DDR的读写操作,通过AXI总线接口实现数据传输,并在SDK中编写C代码进行读写测试。开发环境为Vivado18.3和PYNQ-Z2开发板。在硬件平台上,设计了按键消抖模块以消除按键抖动对读写操作的影响。在SDK中,通过主函数读取DDR中的数据并显示,实现了数据的读取验证。此外,还展示了如何进行硬件调试,包括ILA调试和波形分析,以辅助问题排查。
学习内容
本文首先进行自定义IP的AXI总线IP的设计,然后在SDK下编写代码进行DDR的读写数据的测试。
开发环境
vivado 18.3&SDK
PYNQ-Z2开发板
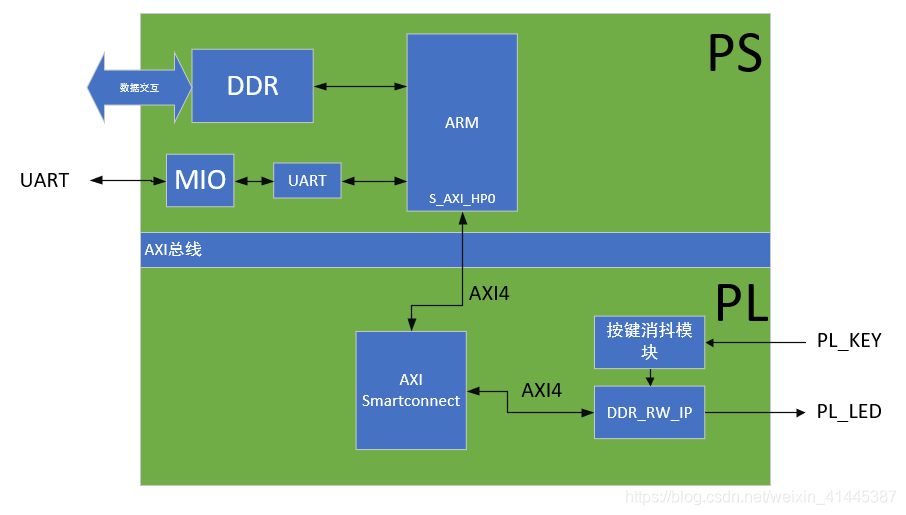
系统框图
首先对本次工程进行简要说明:本次工程使用AXI-Full接口的IP进行DDR的读写测试。在我们的DDR读写IP中,我们把读写完成和读写错误信号关联到PL端的LED上,用于指示DDR读写IP的读写运行状态。然后使用PL部分消抖处理后的按键进行启动AXI总线工作,控制数据写入。通过AXI互联模块连接到AXI_HP0端口,由PS端口进行数据的读取操作,并通过串口进行读写数据的监控。
自定义IP设计
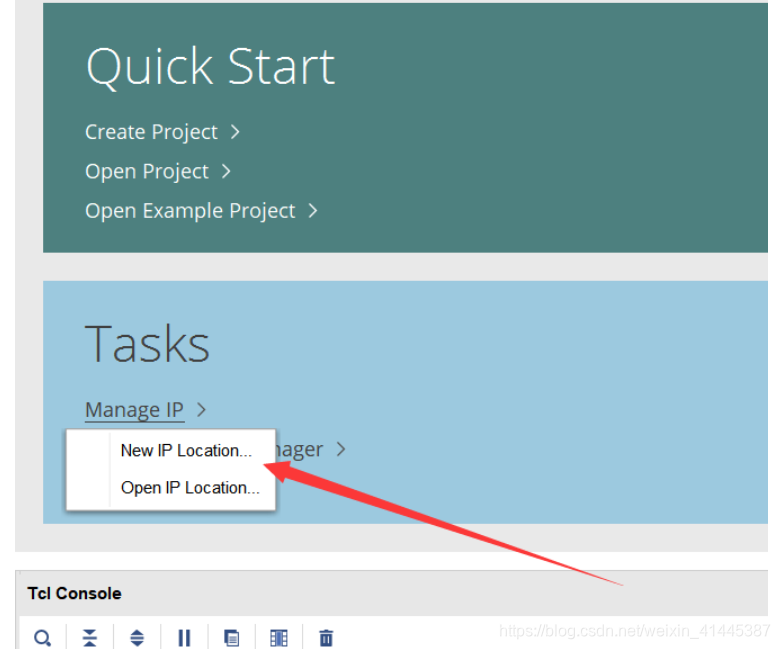
首先打开Vivado软件,在Tasks这里选择New IP lacation
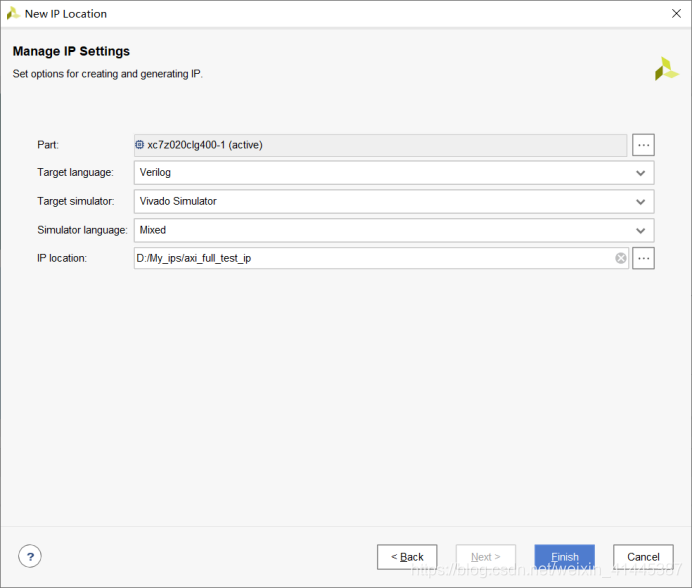
点击next,对IP的信息进行设置,这里我们使用默认配置即可。设置好我们IP要保存的位置。
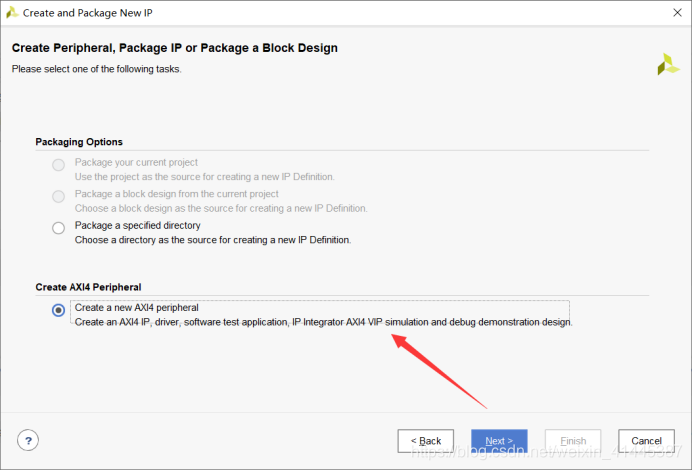
点击Tools中的创建和封装新的IP选项,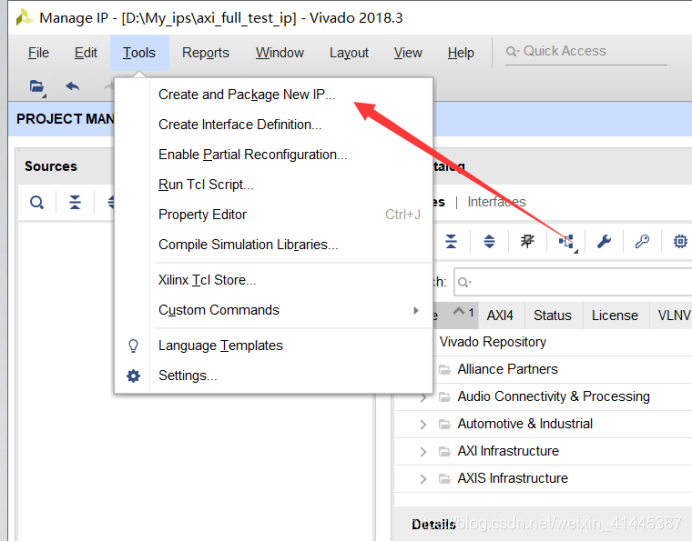
点击NEXT ,选择我们的封装类型。因为这里我们是直接进行打开IP设计的界面,前两个选项是可以在我们的vivado当前工程下面进行封装设计,这里我们只进行了IP设计没有建立工程,所以前两个选项是无法选中的。我们也可以通过工程界面,进入点击Tools中的创建和封装新的IP选项。
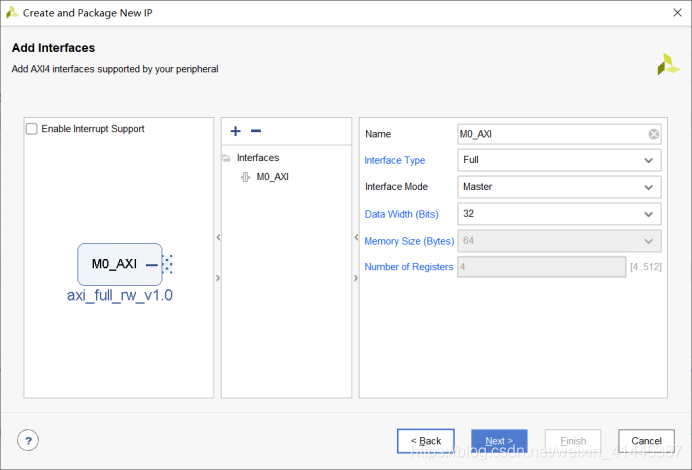
这里是用DDR读写IP来做主机,控制数据写入,PS作为从机进行读取IP中写入的数据。
可以直接选中进行编辑IP,用户可以根据自己的设计进行修改编辑IP的功能,这里没有对IP进行修改处理,所以可以直接保存选择第一个添加到IP库中即可。
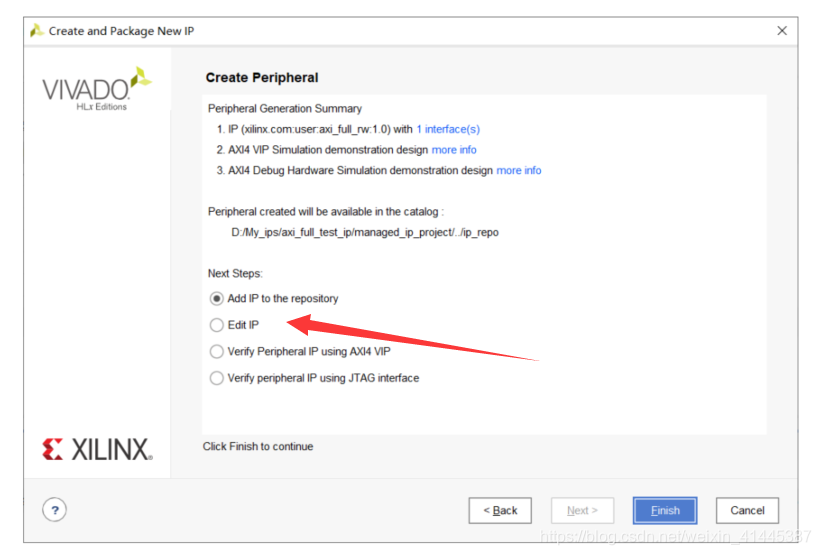
若修改相应的逻辑功能打开IP,在对应位置编辑添加代码即可。
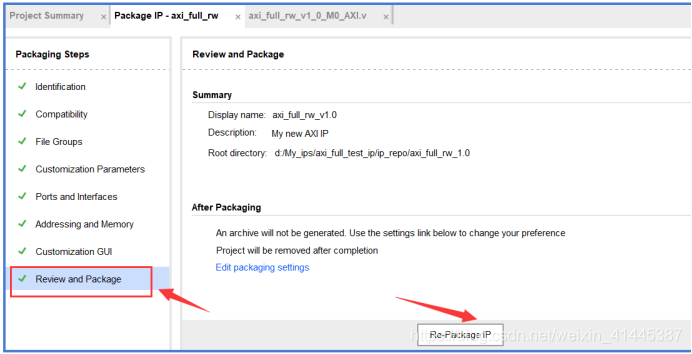
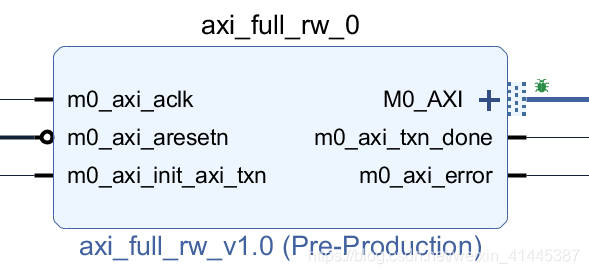
添加完成综合后对IP进行重新打包。DDR读写IP设计完成,创建的 IP 核将通过 AXI4 Master 端口向 Slave 端指定的 4K 存储空间中连续写入 1024 个数据, 写入的数值从 1 累加到 1024, 每个数据占 32bit。然后进行硬件平台的构建。
硬件平台构建
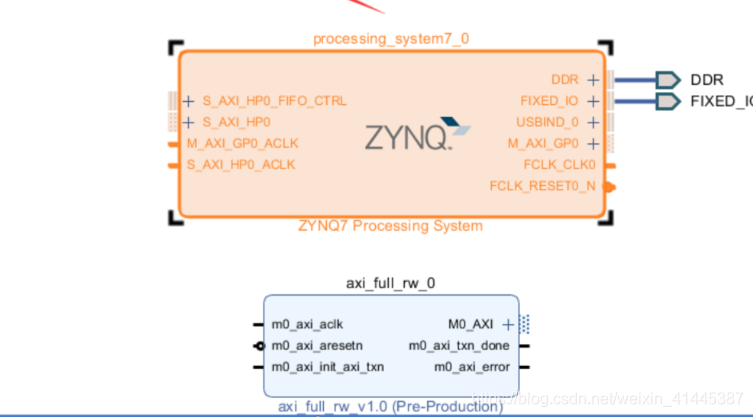
首先,添加ZYNQ7 IP核,以及添加已经完成设计的ddr读写IP核。
添加用户自定义IP
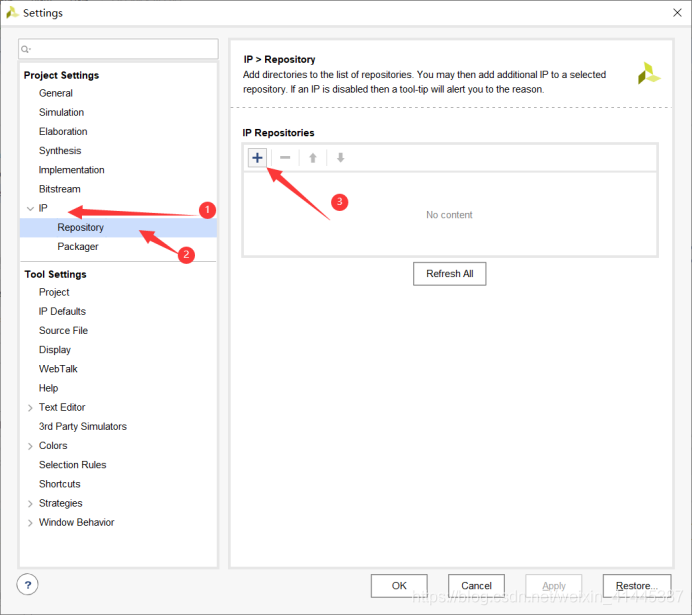
用户自定义的IP可通过以下步骤完成添加。点击Settings,
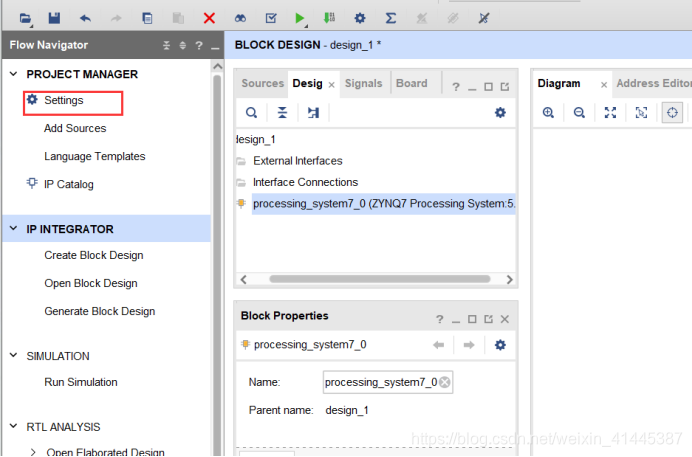
在project settings选择IP,依次点击,在IP库那里点击加号,把对应的IP目录文件夹添加后,点击OK或者Apply即可完成添加,在IP库中就可以找到用户设计的IP。
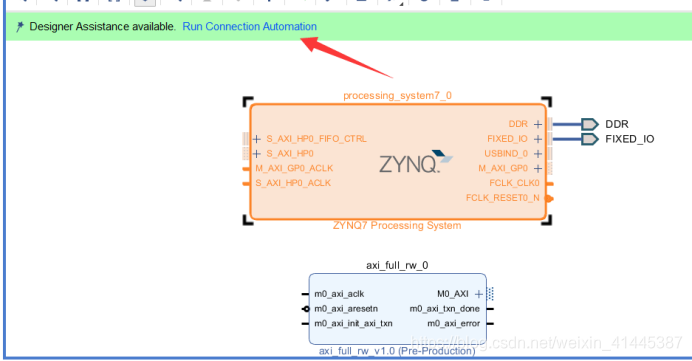
完成IP和ZYNQ7 IP的导入后,如下图:
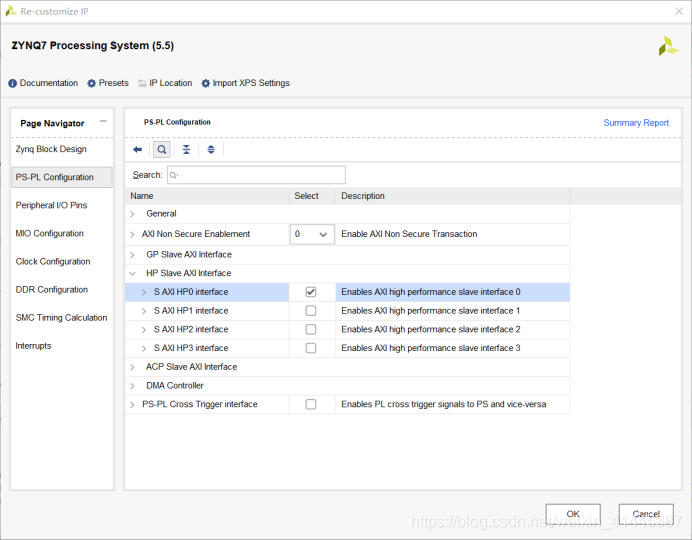
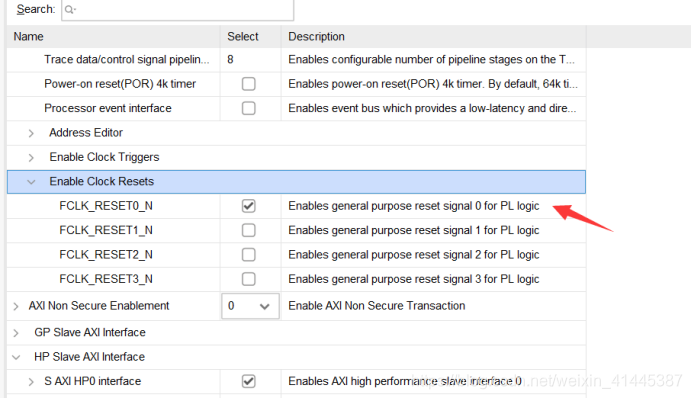
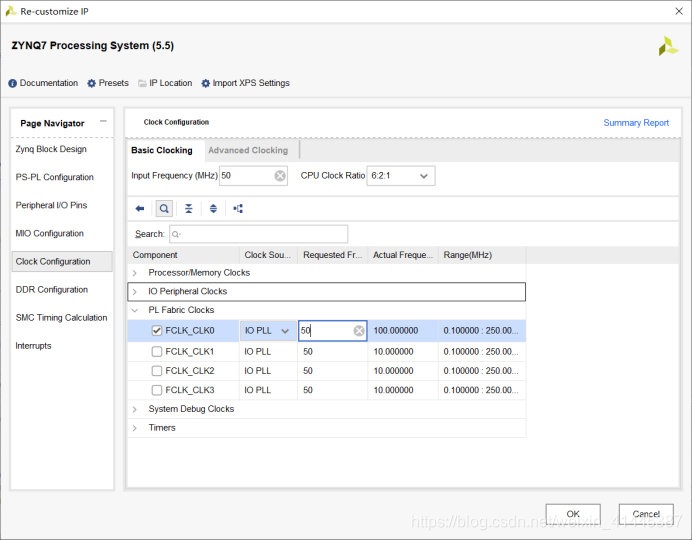
双击打开zynq删除多余的接口,这里只需要保留uart,并打开Slave HP0端口、时钟、复位端口。
配置完,选择自动连接接口,完成部分连接设计。
整体设计图如下,
添加按键消抖IP
由于ddr读写IP的axi_init_axi_txn接入的是按键,这里按键按下会产生抖动,axi_init_axi_txn与好多读写信号关联,如果不添加消抖IP,在按键按下的时,产生的毛刺会进行影响后续的操作,从而导致读写操作的错误,也就是读写操作的指示灯会亮起。
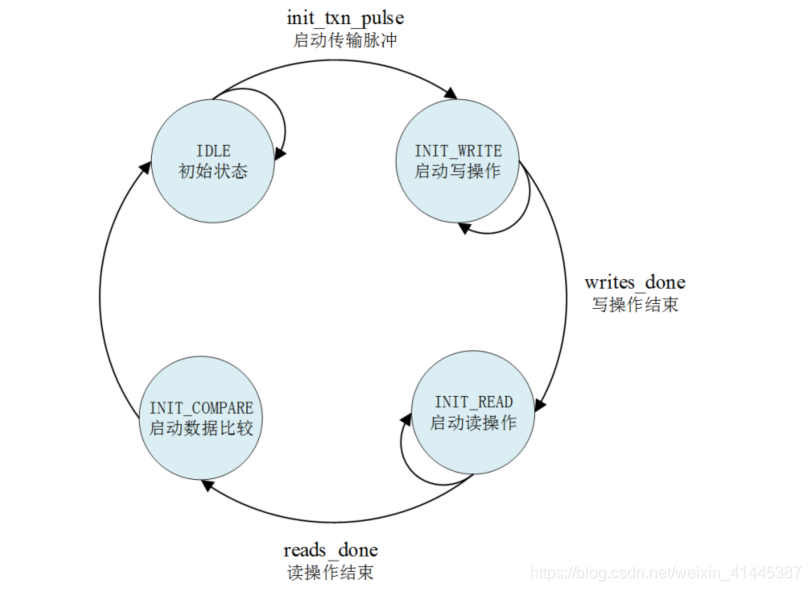
系统复位后, 状态机处于初始状态,在该状态下等待外部输入的启动传输脉冲 init_txn_pulse。一旦检测到 init_txn_pulse 为高电平,状态机跳转到 INIT_WRITE 状态。
在 INIT_WRITE 状态下, 状态机拉高 start_single_burst_write 信号, 来不断地启动 AXI4 Master 接口对Slave 端大小为 4KB 的存储空间进行突发写操作。写操作完成后, write_done 信号会拉高,状态机进入INIT_READ 状态。
在 INIT_READ 状态下, 状态机拉高 start_single_burst_read 信号, 不断地启动 AXI4 Master 接口对 Slave端同一存储空间进行突发读操作, 同时将读出的数据与写入的数据进行对比。读操作完成后, read_done 信号拉高,状态机进入 INIT_COMPARE 状态。
在 INIT_COMPARE 状态下, 判断 AXI4 接口在读写过程中的是否发生错误, 并将错误状态赋值给ERROR 信号, 然后将 compare_done 信号拉高,表示一次读写测试完成。最后跳转到 IDLE 状态,等待下一次读写操作的启动信号。
这里的消抖模块直接添加之前写过的按键消抖模块即可,这里给出我的设计:
module key_filter(
Clk, //50M时钟输入
Rst_n, //模块复位
key_in, //按键输入
key_flag, //按键标志信号
key_state //按键状态信号
);
input Clk;
input Rst_n;
input key_in;
output reg key_flag;
output reg key_state;
localparam
IDEL = 4'b0001,
FILTER0 = 4'b0010,
DOWN = 4'b0100,
FILTER1 = 4'b1000;
reg [3:0]state;
reg [19:0]cnt;
reg en_cnt; //使能计数寄存器
//对外部输入的异步信号进行同步处理
reg key_in_sa,key_in_sb;
always@(posedge Clk or negedge Rst_n)
if(!Rst_n)begin
key_in_sa <= 1'b0;
key_in_sb <= 1'b0;
end
else begin
key_in_sa <= key_in;
key_in_sb <= key_in_sa;
end
reg key_tmpa,key_tmpb;
wire pedge,nedge;
reg cnt_full;//计数满标志信号
//使用D触发器存储两个相邻时钟上升沿时外部输入信号(已经同步到系统时钟域中)的电平状态
always@(posedge Clk or negedge Rst_n)
if(!Rst_n)begin
key_tmpa <= 1'b0;
key_tmpb <= 1'b0;
end
else begin
key_tmpa <= key_in_sb;
key_tmpb <= key_tmpa;
end
//产生跳变沿信号
assign nedge = !key_tmpa & key_tmpb;
assign pedge = key_tmpa & (!key_tmpb);
always@(posedge Clk or negedge Rst_n)
if(!Rst_n)begin
en_cnt <= 1'b0;
state <= IDEL;
key_flag <= 1'b0;
key_state <= 1'b1;
end
else begin
case(state)
IDEL :
begin
key_flag <= 1'b0;
if(nedge)begin
state <= FILTER0;
en_cnt <= 1'b1;
end
else
state <= IDEL;
end
FILTER0:
if(cnt_full)begin
key_flag <= 1'b1;
key_state <= 1'b0;
en_cnt <= 1'b0;
state <= DOWN;
end
else if(pedge)begin
state <= IDEL;
en_cnt <= 1'b0;
end
else
state <= FILTER0;
DOWN:
begin
key_flag <= 1'b0;
if(pedge)begin
state <= FILTER1;
en_cnt <= 1'b1;
end
else
state <= DOWN;
end
FILTER1:
if(cnt_full)begin
key_flag <= 1'b1;
key_state <= 1'b1;
state <= IDEL;
en_cnt <= 1'b0;
end
else if(nedge)begin
en_cnt <= 1'b0;
state <= DOWN;
end
else
state <= FILTER1;
default:
begin
state <= IDEL;
en_cnt <= 1'b0;
key_flag <= 1'b0;
key_state <= 1'b1;
end
endcase
end
always@(posedge Clk or negedge Rst_n)
if(!Rst_n)
cnt <= 20'd0;
else if(en_cnt)
cnt <= cnt + 1'b1;
else
cnt <= 20'd0;
always@(posedge Clk or negedge Rst_n)
if(!Rst_n)
cnt_full <= 1'b0;
else if(cnt == 20'd999_999)
cnt_full <= 1'b1;
else
cnt_full <= 1'b0;
endmodule
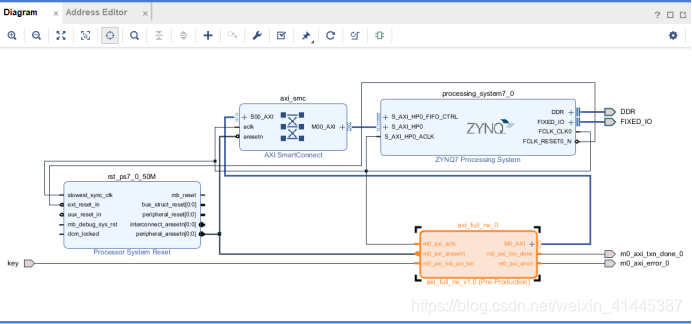
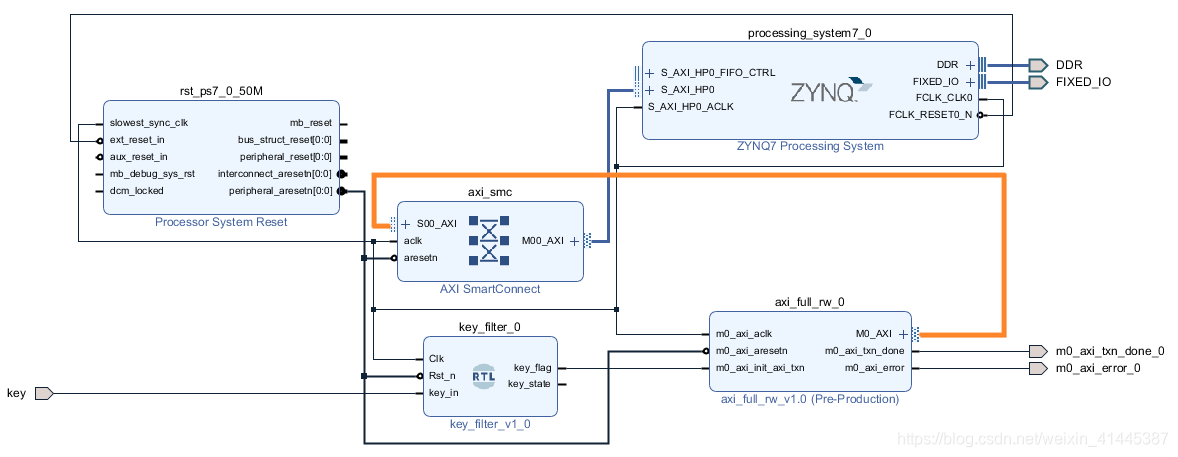
添加完模块后系统设计如下:
注:axi_init_axi_txn是上升沿有效,这里为了保证系统上电后是初始默认随机状态,要确保按键未按下给启动脉冲时,是低电平。因为PYNQZ2开发板按键默认电位是低,按下为高,这里不用进行处理,若按键按下后为低,默认拉高,这里可以对按键进行添加非逻辑的IP进行取反。(使用 utility vector logic IP完成配置)
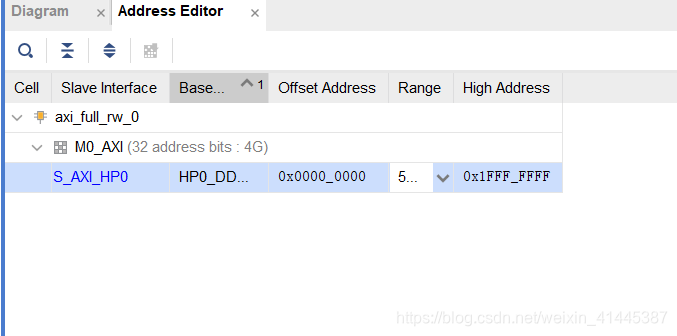
双击DDR读写的IP核进行配置,这里没有用到user的接口所以都设置为0,如图:
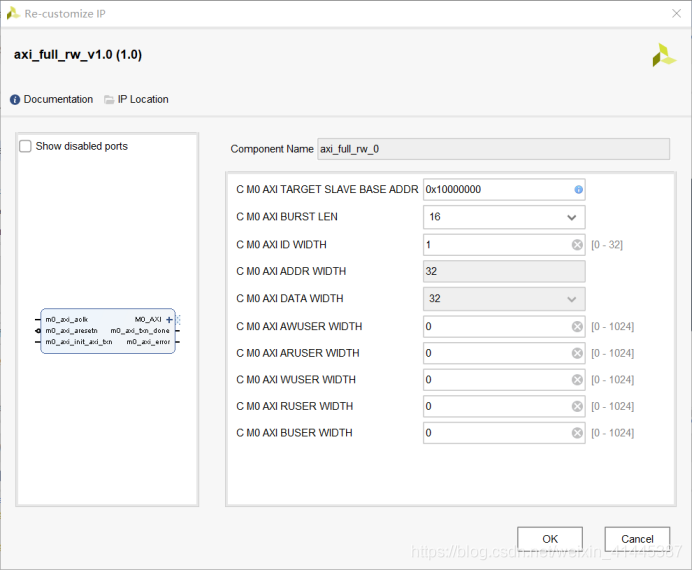
对于Base address,我们可以查看下接口的地址范围,避免数据操作超过可操作范围,这里我们就取中间值0X10000000。
然后我们进行generate output product 然后生成HDL封装。接着就对应引脚进行引脚约束即可(PYNQ的粉色开发板可以直接引用这个约束):
##LEDs
set_property -dict { PACKAGE_PIN R14 IOSTANDARD LVCMOS33 } [get_ports { m0_axi_error_0 }]; #IO_L6N_T0_VREF_34 Sch=led[0]
set_property -dict { PACKAGE_PIN P14 IOSTANDARD LVCMOS33 } [get_ports { m0_axi_txn_done_0}]; #IO_L6P_T0_34 Sch=led[1]
##Buttons
set_property -dict { PACKAGE_PIN D19 IOSTANDARD LVCMOS33 } [get_ports { key }]; #IO_L4P_T0_35 Sch=btn[0]
完成约束后进行综合布局布线,等待生成bit流文件。
bit文件生成后在FILE处,点击导出硬件资源(包含bit流文件),接着launch SDK。
SDK软件部分
打开SDK后,新建application project。在main.c中输入以下代码:
#include "stdio.h"
#include "xil_cache.h"
#include "xil_printf.h"
#include "xil_io.h"
int main(){
int i;
char chardata;
Xil_DCacheDisable();
printf("AXI4-FULL RW TEST~\n\r");
while(1){
scanf("%c",chardata);
if(chardata="y"){
printf("start\r\n");
for(i=0;i<4096;i=i+4){
printf("%d is %d\n",i,(int)(Xil_In32(0x10000000+i)));
}
}
}
return 0;
}
代码简要说明
这里使用的IP我们设定成不需要进行缓存的,所以在main函数中调用Xil_DCacheDisable();。使用Xil_In32(),对DDR对应位置的数据进行读取。参数只需要传递所要读取的地址即可。因为一次写入的数据是32位的,每个地址的数据位宽是8位,所以在for循环中使用了i=i+4。
在串口中使用printf("%d is %d\n",i,(int)(Xil_In32(0x10000000+i)));对相应地址的数据进行读取显示。
运行效果
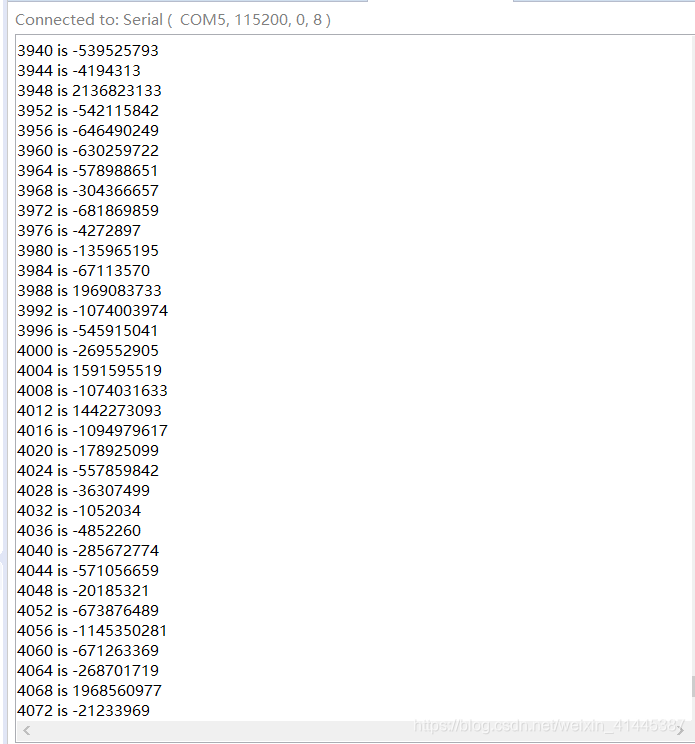
当按键未按下时,也就是未进行写入操作直接读取数据,DDR中的数据是默认的随机状态,如下所示:
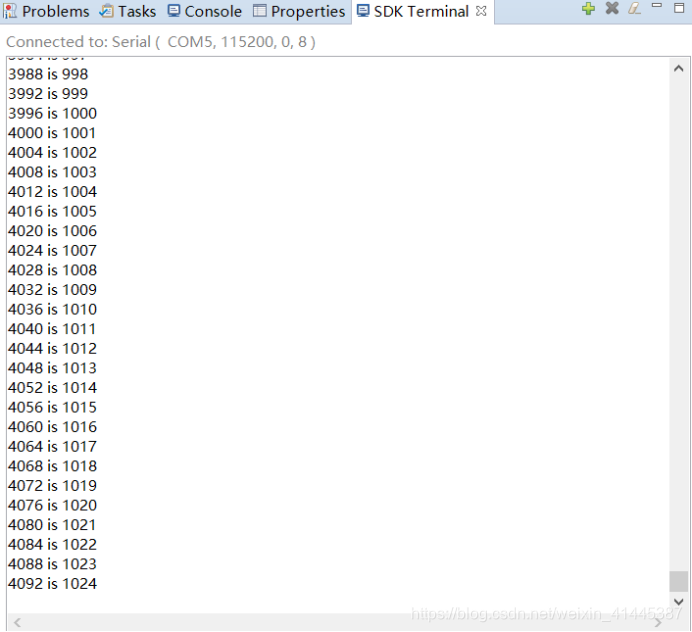
当按键按下后,IP完成数据写入操作,数据是从1-1024自增的
如何波形进行debug?
这里我们选中要进行DEBUG的数据信号右击选中debug
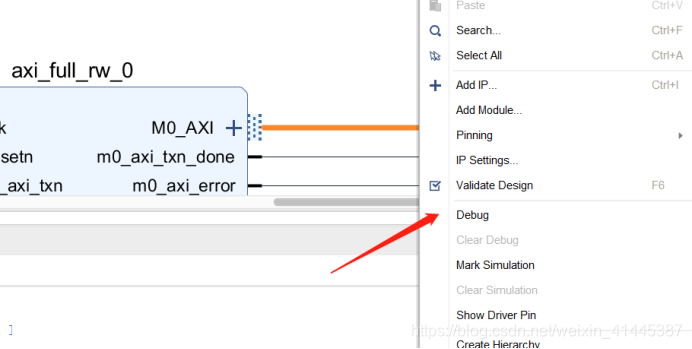
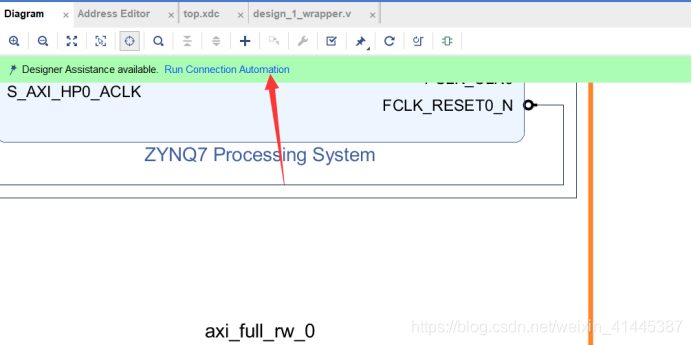
然后点击自动连接,完成debug功能搭建
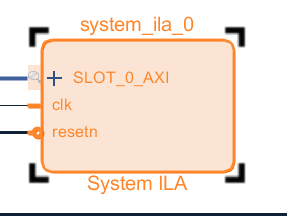
综合后会多出ILA的IP进行波形分析帮助DEBUG。
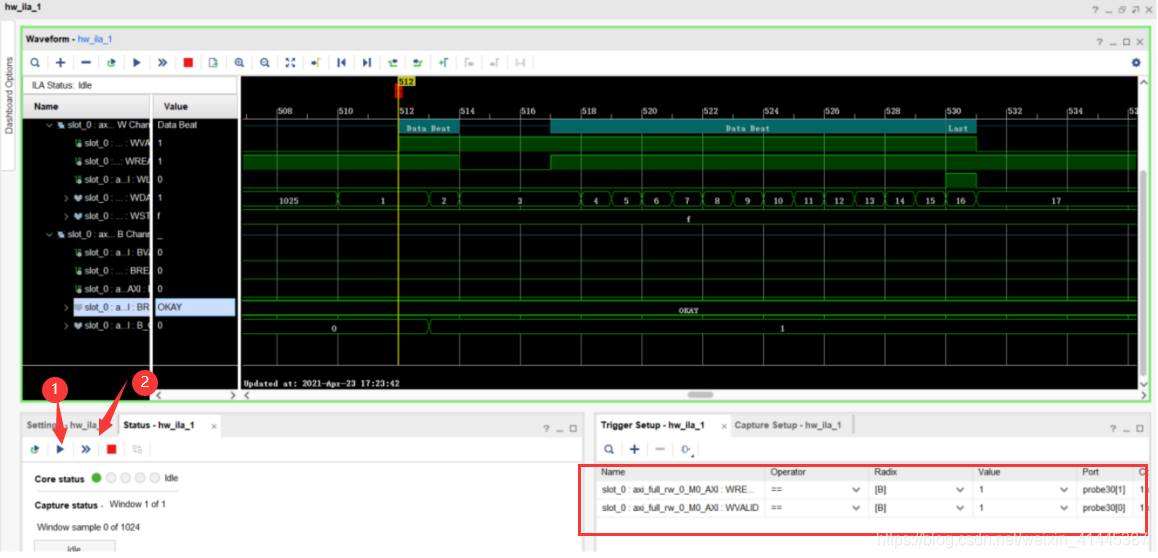
然后打开硬件设备,如下图在ila界面即可看到我们debug的波形数据了。
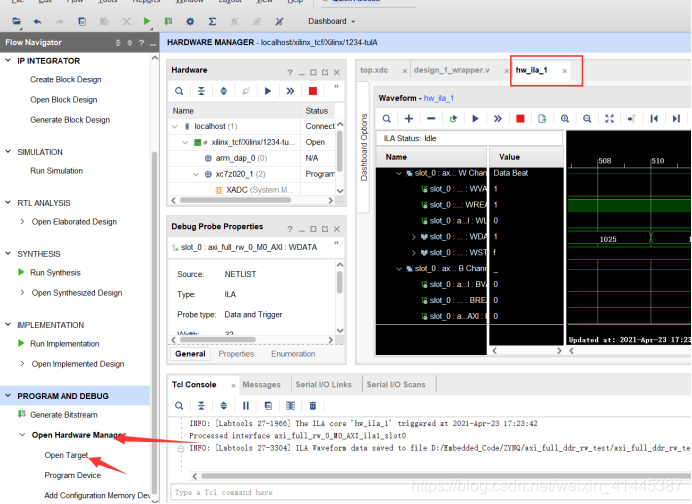
添加触发条件,标号2是单次触发,标号1是一直运行debug抓取波形。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











