







0 序言
需求:在一些项目工作中,部分数据是激光雷达数据扫描得到的,部分数据是设计的数据模型,因此如何让两者能够很好地结合在一起成为需要考虑的问题。
1 例子
在此过程中,我没能用到open3d的模型生成处理。例如,本来是我们获取到有个圆柱形的点云数据,但是设计数据是一个规则的数据,我们需要计算采集的点云数据与设计的规则数据之间的差异。这时候就需要我们将规则的模型数据采集成为点云数据。
首先,将真个过程列在如下,后面注释逐一对本行代码进行解释:
下面展示一些 代码片,可直接进行复制运行。
// code
# -*- coding: utf-8 -*-
"""
Created on Wed Feb 8 21:14:09 2023
@author: ZHIYANG
"""
import open3d as o3d
import numpy as np
height = 6.0 #设定圆柱体的高度参数
radius = 2.0 #设定圆柱体的半径参数
mesh_cylinder = o3d.geometry.TriangleMesh.create_cylinder(radius,height) #生成圆柱体的格网模型
mesh_cylinder.paint_uniform_color([1.0,0.0,0.0]) #设定圆柱体格网模型的颜色为红色
o3d.visualization.draw_geometries([mesh_cylinder], width=800 ,height = 600) #对格网模型进行可视化
# Mesh To PointCloud 格网数据转为pcd数据
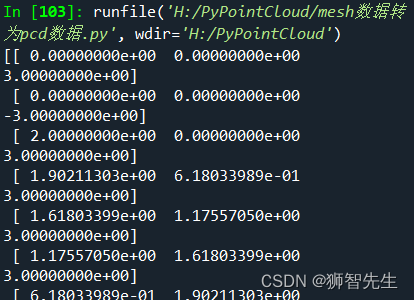
print(np.asarray(mesh_cylinder.vertices))#三角形顶点的坐标xyz,无法直接读取,需要借助numpy
print(np.asarray(mesh_cylinder.triangles))#构成三角网的顶点索引,无法直接读取,需要借助numpy
cy_array = np.asarray(mesh_cylinder.vertices)
cy_pc = o3d.geometry.PointCloud()#声明一个pcd类型变量
cy_pc.points = o3d.utility.Vector3dVector(cy_array)#将array数据形式转为pcd数据形式,便于其他函数处理
# print(np.asarray(cy_pc.points[0]))#输出指定点的坐标
o3d.visualization.draw_geometries([cy_pc], width = 800, height = 600)
其中,
// 将格网数据设定为red,并进行可视化
mesh_cylinder.paint_uniform_color([1.0,0.0,0.0])
o3d.visualization.draw_geometries([mesh_cylinder], width=800 ,height = 600)
其中,
// block
print(np.asarray(mesh_cylinder.vertices)) #三角形顶点的坐标xyz,无法直接读取,需要借助numpy foo = 'bar';
结果如图所示,
其中,
// block
print(np.asarray(mesh_cylinder.triangles)) #构成三角网的顶点索引,无法直接读取,需要借助numpy

其中,
// block
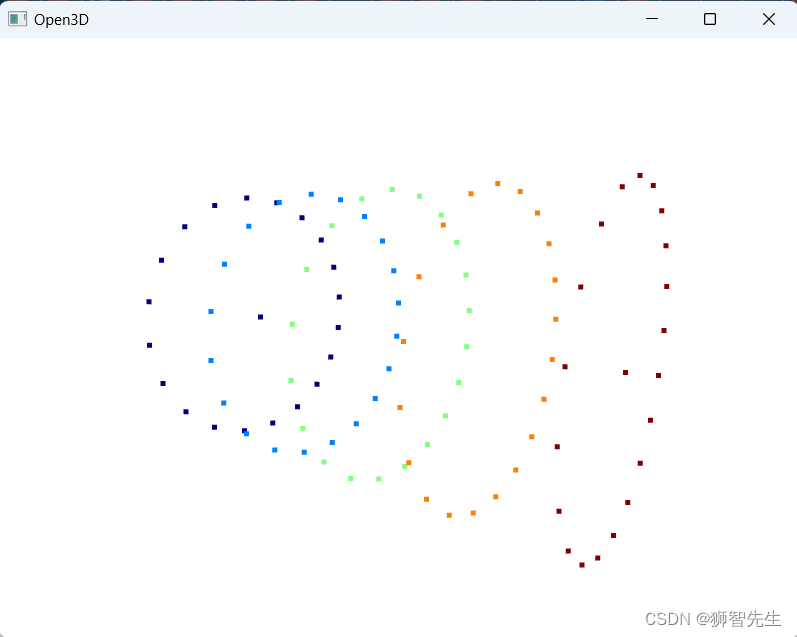
cy_assay = np.asarray(mesh_cylinder.vertices)
cy_pc = o3d.geometry.PointCloud()#声明一个pcd类型变量
cy_pc.points = o3d.utility.Vector3dVector(cy_assay)#将array数据形式转为pcd数据形式,便于其他函数处理
将array数据转为pcd数据,需要用到Vector3dVector
// 对上述从mesh转化为pcd的数据进行可视化
o3d.visualization.draw_geometries([cy_pc], width = 800, height = 600)
继续ing















 39万+
39万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









