






1.前言
本文章基于自动驾驶系列[教程](https://www.youtube.com/watch?v=TBdcwwr5Wyk)
文章部分来源于CSDN前辈[锡城筱凯](https://blog.csdn.net/xiaokai1999/article/details/119220396)
2.步骤
1. 下载kitti2bag插件
pip3 install kitti2bag
2. 开始转换数据
在KITTI官网下载数据集合,本教程需要用到
Data Category: City中的2011_09_26_drive_0005 (0.6 GB) 需要同时下载[synced+rectified data] 和[calibration] 下载后将校正文件与数据集文件夹放在同一个文件夹内,然后使用unzip+压缩包名 进行解压,解压之后是都在一个只有日期的文件夹内,此时使用
kitti2bag -t 2011_09_26 -r 0005 raw_synced .
3. 生成ROS可以读取的数据包
具体例子参考
4. 在ROS中查看Kitti数据集
$ roscore
$ rosbag play -l kitti_2011_09_26_drive_0005_synced.bag
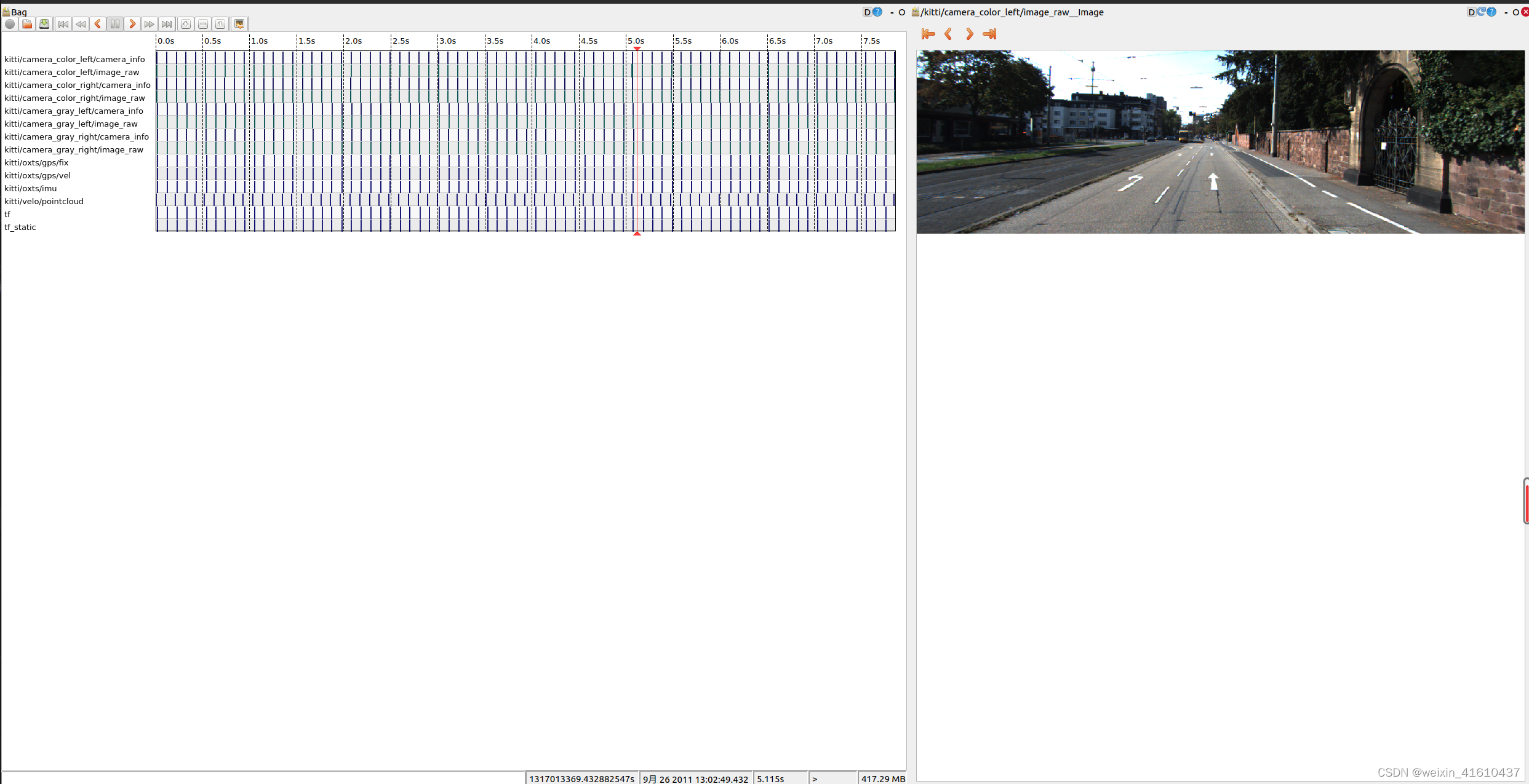
$ rqt_image_view
运行示例:















 3570
3570











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









