# 导入相关模块
import os
import tensorflow as tf
import math
import numpy as np
import itertools
from waymo_open_dataset.utils import range_image_utils
from waymo_open_dataset.utils import transform_utils
from waymo_open_dataset.utils import frame_utils
from waymo_open_dataset import dataset_pb2 as open_dataset
# 读取一帧
# 数据集中的每个文件都是一系列帧,按帧的开始时间戳排列的
FILENAME = '/your/path/to/frames'
dataset = tf.data.TFRecordDataset(FILENAME, compression_type='')
for data in dataset:
frame = open_dataset.Frame()
frame.ParseFromString(bytearray(data.numpy()))
break
# 从frame中parse出距离图像和摄像头投影
(range_images, camera_projections,
_, range_image_top_pose) = frame_utils.parse_range_image_and_camera_projection(frame)
print(frame.context)
# 输出如下
name: "1887497421568128425_94_000_114_000"
camera_calibrations {
name: FRONT
intrinsic: 2044.3189893365634 # 3x3内参矩阵展平
intrinsic: 2044.3189893365634
intrinsic: 966.3197697401635
intrinsic: 624.7706323955747
intrinsic: 0.048519645404847
intrinsic: -0.31855151741237414
intrinsic: -0.0005279507169045765
intrinsic: -0.0010850539443264748
intrinsic: 0.0
extrinsic { # 4x4外参矩阵展平
transform: 0.9999646289832713
transform: 0.008246053155616117
transform: -0.0016563181166113767
transform: 1.539410419713088
transform: -0.00821545053170668
transform: 0.9998095286456695
transform: 0.01770346863994159
transform: -0.02209790123934037
transform: 0.001801986378900245
transform: -0.01768923505070438
transform: 0.9998419094078879
transform: 2.1155481715436157
transform: 0.0
transform: 0.0
transform: 0.0
transform: 1.0
}
width: 1920
height: 1280
rolling_shutter_direction: RIGHT_TO_LEFT
}
......
laser_calibrations {
name: FRONT
beam_inclination_min: -1.5707963267948966
beam_inclination_max: 0.5235987755982988
extrinsic { # 4x4外参矩阵展平
transform: 0.9999048208492021
transform: 0.013695249190427495
transform: 0.0016701473399531404
transform: 4.07
transform: -0.013714694211443964
transform: 0.9998309396760642
transform: 0.012247417244672352
transform: 0.0
transform: -0.0015021335531979008
transform: -0.01226915710595505
transform: 0.9999236027710805
transform: 0.689
transform: 0.0
transform: 0.0
transform: 0.0
transform: 1.0
}
}
......
laser_calibrations {
name: TOP
beam_inclinations: -0.3109493854930212 # 64线激光束倾角
beam_inclinations: -0.30000797541691293
beam_inclinations: -0.28894899849179745
beam_inclinations: -0.27914715773047827
beam_inclinations: -0.26885488607059527
beam_inclinations: -0.2587631844009475
beam_inclinations: -0.2496436247739
beam_inclinations: -0.23989098905841688
beam_inclinations: -0.23102118903462854
beam_inclinations: -0.22145870237981402
beam_inclinations: -0.21238996690976286
beam_inclinations: -0.20353703902829912
beam_inclinations: -0.19500701059583037
beam_inclinations: -0.18651174674860194
beam_inclinations: -0.17878444725969622
beam_inclinations: -0.17037497392150325
beam_inclinations: -0.16275416990018288
beam_inclinations: -0.15483289542313527
beam_inclinations: -0.1478791701456641
beam_inclinations: -0.14019162329181478
beam_inclinations: -0.1334295535482175
beam_inclinations: -0.12572409229511128
beam_inclinations: -0.1191768458241973
beam_inclinations: -0.11248261105736179
beam_inclinations: -0.10616972942937819
beam_inclinations: -0.09994175384109583
beam_inclinations: -0.0942770856777746
beam_inclinations: -0.08824504125653987
beam_inclinations: -0.08329002824756504
beam_inclinations: -0.07750058418225625
beam_inclinations: -0.07261572005798489
beam_inclinations: -0.067625528780896
beam_inclinations: -0.06307231708736083
beam_inclinations: -0.05810509472866876
beam_inclinations: -0.054288110830716496
beam_inclinations: -0.04972514815889717
beam_inclinations: -0.04591839416273613
beam_inclinations: -0.041593579281457904
beam_inclinations: -0.038109181768801514
beam_inclinations: -0.03411633830316019
beam_inclinations: -0.031502879502198766
beam_inclinations: -0.02779932795483009
beam_inclinations: -0.025184279030967982
beam_inclinations: -0.022024062904501873
beam_inclinations: -0.019379929499173887
beam_inclinations: -0.01602395690597569
beam_inclinations: -0.013814845777836648
beam_inclinations: -0.010652459373336809
beam_inclinations: -0.007632915795832584
beam_inclinations: -0.00444004277348653
beam_inclinations: -0.0017582387733503513
beam_inclinations: 0.0013751081632051854
beam_inclinations: 0.0036498475711435052
beam_inclinations: 0.006660825067341447
beam_inclinations: 0.009540156078575501
beam_inclinations: 0.012668780564021542
beam_inclinations: 0.01550473973846933
beam_inclinations: 0.01861105589746259
beam_inclinations: 0.020996297564079613
beam_inclinations: 0.023855099978695282
beam_inclinations: 0.026797513488081792
beam_inclinations: 0.02994290957014778
beam_inclinations: 0.03280612751232437
beam_inclinations: 0.0359642112806986
beam_inclination_min: -0.31642009053107534
beam_inclination_max: 0.037543253164885715
extrinsic { # 4x4外参矩阵展平
transform: -0.857219928456495
transform: -0.5149504002527315
transform: -0.0002820223274792702
transform: 1.43
transform: 0.5149500725158579
transform: -0.8572198126137495
transform: 0.0007846517450211272
transform: 0.0
transform: -0.0006458118568723072
transform: 0.0005273916947437333
transform: 0.9999996523924625
transform: 2.184
transform: 0.0
transform: 0.0
transform: 0.0
transform: 1.0
}
}
stats {
laser_object_counts {
type: TYPE_VEHICLE
count: 57
}
laser_object_counts {
type: TYPE_PEDESTRIAN
count: 1
}
laser_object_counts {
type: TYPE_SIGN
count: 9
}
time_of_day: "Day"
location: "location_other"
weather: "sunny"
camera_object_counts {
type: TYPE_VEHICLE
count: 37
}
camera_object_counts {
type: TYPE_PEDESTRIAN
count: 1
}
}
# 可视化相机图像和相机标签
import matplotlib.pyplot as plt
import matplotlib.patches as patches
def show_camera_image(camera_image, camera_labels, layout, cmap=None):
"""Show a camera image and the given camera labels."""
ax = plt.subplot(*layout)
# Draw the camera labels.
for camera_labels in camera_labels:
# Ignore camera labels that do not correspond to this camera.
if camera_labels.name != camera_image.name:
continue
# Iterate over the individual labels.
for label in camera_labels.labels:
# Draw the object bounding box.
ax.add_patch(patches.Rectangle(xy=(label.box.center_x - 0.5 * label.box.length,
label.box.center_y - 0.5 * label.box.width),
width=label.box.length, height=label.box.width,
linewidth=1, edgecolor='red', facecolor='none'))
# Show the camera image.
plt.imshow(tf.image.decode_jpeg(camera_image.image), cmap=cmap)
plt.title(open_dataset.CameraName.Name.Name(camera_image.name))
plt.grid(False)
plt.axis('off')
plt.figure(figsize=(64, 60))
for index, image in enumerate(frame.images):
show_camera_image(image, frame.camera_labels, [3, 3, index+1])

# 可视化距离图像
plt.figure(figsize=(64, 20))
def plot_range_image_helper(data, name, layout, vmin = 0, vmax=1, cmap='gray'):
"""Plots range image.
Args:
data: range image data
name: the image title
layout: plt layout
vmin: minimum value of the passed data
vmax: maximum value of the passed data
cmap: color map
"""
plt.subplot(*layout)
plt.imshow(data, cmap=cmap, vmin=vmin, vmax=vmax)
plt.title(name)
plt.grid(False)
plt.axis('off')
def get_range_image(laser_name, return_index):
"""Returns range image given a laser name and its return index."""
return range_images[laser_name][return_index]
def show_range_image(range_image, layout_index_start = 1):
"""Shows range image.
Args:
range_image: the range image data from a given lidar of type MatrixFloat.
layout_index_start: layout offset
"""
range_image_tensor = tf.convert_to_tensor(range_image.data)
range_image_tensor = tf.reshape(range_image_tensor, range_image.shape.dims)
lidar_image_mask = tf.greater_equal(range_image_tensor, 0)
range_image_tensor = tf.where(lidar_image_mask, range_image_tensor,
tf.ones_like(range_image_tensor) * 1e10)
range_image_range = range_image_tensor[...,0]
range_image_intensity = range_image_tensor[...,1]
range_image_elongation = range_image_tensor[...,2]
plot_range_image_helper(range_image_range.numpy(), 'range',
[8, 1, layout_index_start], vmax=75, cmap='gray')
plot_range_image_helper(range_image_intensity.numpy(), 'intensity',
[8, 1, layout_index_start + 1], vmax=1.5, cmap='gray')
plot_range_image_helper(range_image_elongation.numpy(), 'elongation',
[8, 1, layout_index_start + 2], vmax=1.5, cmap='gray')
frame.lasers.sort(key=lambda laser: laser.name)
show_range_image(get_range_image(open_dataset.LaserName.TOP, 0), 1)
show_range_image(get_range_image(open_dataset.LaserName.TOP, 1), 4)
# 点云转换与可视化
points, cp_points = frame_utils.convert_range_image_to_point_cloud(
frame,
range_images,
camera_projections,
range_image_top_pose)
points_ri2, cp_points_ri2 = frame_utils.convert_range_image_to_point_cloud(
frame,
range_images,
camera_projections,
range_image_top_pose,
ri_index=1)
# 3d points in vehicle frame.
points_all = np.concatenate(points, axis=0)
points_all_ri2 = np.concatenate(points_ri2, axis=0)
# camera projection corresponding to each point.
cp_points_all = np.concatenate(cp_points, axis=0)
cp_points_all_ri2 = np.concatenate(cp_points_ri2, axis=0)
print(points_all.shape)
print(cp_points_all.shape)
print(points_all[0:2])
for i in range(5):
print(points[i].shape)
print(cp_points[i].shape)
print(points_all_ri2.shape)
print(cp_points_all_ri2.shape)
print(points_all_ri2[0:2])
for i in range(5):
print(points_ri2[i].shape)
print(cp_points_ri2[i].shape)
# 上述points都是ndarray格式,可以用mayavi可视化点云
# 输出如下
(164256, 3)
(164256, 6)
[[-6.1152344e+01 -7.6904297e-03 4.3441429e+00]
[-6.4060211e+01 1.4831543e-01 4.4438515e+00]]
(148217, 3)
(148217, 6)
(3847, 3)
(3847, 6)
(4171, 3)
(4171, 6)
(4421, 3)
(4421, 6)
(3600, 3)
(3600, 6)
(25830, 3)
(25830, 6)
[[-63.50363 12.851746 4.570942 ]
[-64.729034 14.886841 4.6256332]]
(25425, 3)
(25425, 6)
(98, 3)
(98, 6)
(103, 3)
(103, 6)
(158, 3)
(158, 6)
(46, 3)
(46, 6)

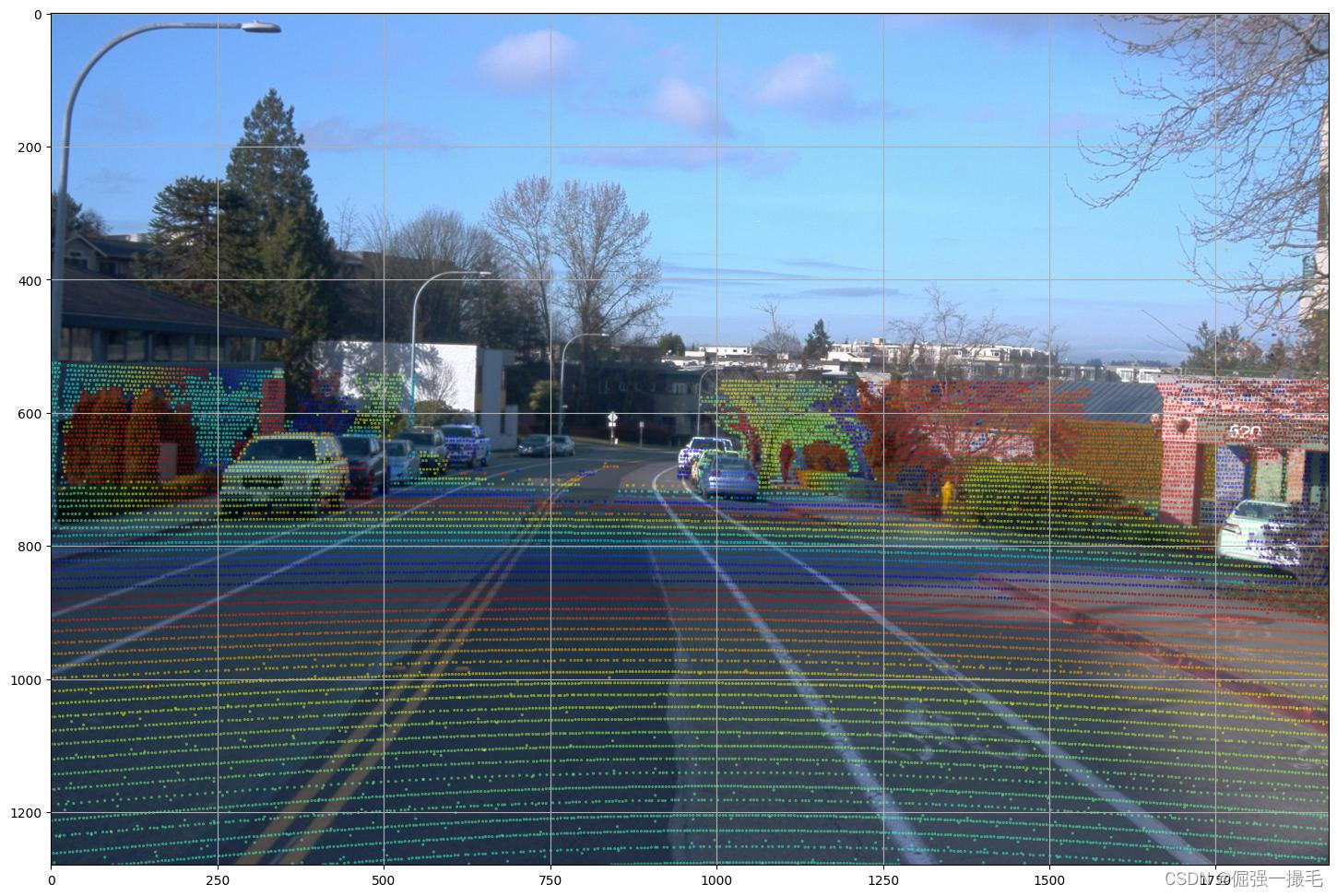
# 可视化相机投影
images = sorted(frame.images, key=lambda i:i.name)
cp_points_all_concat = np.concatenate([cp_points_all, points_all], axis=-1)
cp_points_all_concat_tensor = tf.constant(cp_points_all_concat)
# The distance between lidar points and vehicle frame origin.
points_all_tensor = tf.norm(points_all, axis=-1, keepdims=True)
cp_points_all_tensor = tf.constant(cp_points_all, dtype=tf.int32)
mask = tf.equal(cp_points_all_tensor[..., 0], images[0].name)
cp_points_all_tensor = tf.cast(tf.gather_nd(
cp_points_all_tensor, tf.where(mask)), dtype=tf.float32)
points_all_tensor = tf.gather_nd(points_all_tensor, tf.where(mask))
projected_points_all_from_raw_data = tf.concat(
[cp_points_all_tensor[..., 1:3], points_all_tensor], axis=-1).numpy()
def rgba(r):
"""Generates a color based on range.
Args:
r: the range value of a given point.
Returns:
The color for a given range
"""
c = plt.get_cmap('jet')((r % 20.0) / 20.0)
c = list(c)
c[-1] = 0.5 # alpha
return c
def plot_image(camera_image):
"""Plot a cmaera image."""
plt.figure(figsize=(20, 12))
plt.imshow(tf.image.decode_jpeg(camera_image.image))
plt.grid("off")
# 可视化相机投影
def plot_points_on_image(projected_points, camera_image, rgba_func,
point_size=10.0):
"""Plots points on a camera image.
Args:
projected_points: [N, 3] numpy array. The inner dims are
[camera_x, camera_y, range].
camera_image: jpeg encoded camera image.
rgba_func: a function that generates a color from a range value.
point_size: the point size.
"""
plot_image(camera_image)
xs = []
ys = []
colors = []
for point in projected_points:
xs.append(point[0]) # width, col
ys.append(point[1]) # height, row
colors.append(rgba_func(point[2]))
plt.scatter(xs, ys, c=colors, s=point_size, edgecolors="none")
plot_points_on_image(projected_points_all_from_raw_data,
images[0], rgba, point_size=5.0)
plt.savefig('pc_project.jpg', bbox_inches='tight')

























 698
698

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









