







1 矩阵开源框架
算法中矩阵运算是常用的,但动手写各种函数费事费力,可以考虑使用开源的框架,直接调用其定义的类和函数即可。基础用法可参考下列文章。
Eigen介绍及简单使用_fengbingchun的博客-CSDN博客_eigen的使用
C++矩阵库 Eigen 简介 - rainbow70626 - 博客园
其他如矩阵转置、矩阵乘法、矩阵求逆等,比较容易,看资料即可。
这里特别提一下cholesky分解,这在UKF算法中是必需使用的,在Eigen中使用LLT分解,使用如下代码即可对正定矩阵求cholesky分解。
m_l = m.llt().matrixL(); // cholesky分解
2 几种导致算法挂死的原因
由于编码不规范,或测试不到位,存在问题的算法代码被用到了产品上。随着实际场景工作时间累积,问题逐渐暴露,以下是几种典型的导致代码崩溃的原因。
2.1 数组越界
车载雷达的内存是固定的,不会临时申请内存空间,如果出现数据量超出内存设计值,而又没有进行保护的话,则会出现数组越界,最终导致代码崩溃,雷达挂死。
这种问题在DBSCAN中容易出现,测试数据覆盖不全时,不会出现数组越界,只有当点云数量特别多时,才可能出现这个问题。在代码编写过程中,需要注意边界保护,同时测试应当尽量充分。
2.2 矩阵计算出现非正定
在卡尔曼滤波算法中,通常要求矩阵是正定的,这样计算求逆或分解时不会出现异常值。实际情况是,矩阵计算容易出现非正定情况,如果强行求逆或分解,容易出现异常,导致后续算法混乱,导致挂死。
对于矩阵求逆和分解,应当做正定判断,或做正定修正。
2.3 模式切换获取数据失败
不少雷达都有多种工作模式,不同工作模式下的数据和地址不太一致,如果工作模式切换后,直接调用原先的指针,则会出现从空指针读取数据的情况,导致数据异常而挂死。
良好的编码习惯,充分的测试验证可以避免出现这些问题。
3 用core文件调试段错误的实例
3.0 前言
应用程序运行出错或异常退出时,在满足一定条件下产生一个core文件,例如程序收到SIGABRT、SIGEMT等信号时(注:在signal.h里说明了哪些新号会产生coredump)都会出现coredump,我们平时见到最多的应该就是段错误。
core文件包含了程序运行时内存、寄存器状态、堆栈指针、内存管理信息以及函数调用堆栈信息。
我们通过分析core文件可以找到应用程序崩溃的地方。基础信息可以参考这篇博客。
core文件如何分析_水枂的博客-CSDN博客_core文件怎么分析
下面开始实操。
3.1 基础配置
首先打开终端,在终端中配置core的大小为unlimited
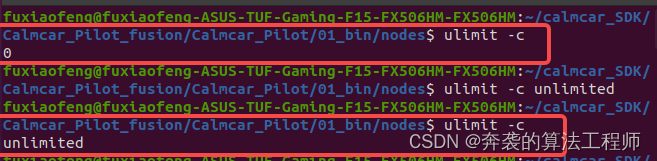
可以看到一开始core大小为0,是不会生成core文件的,运行命令后为不限制大小
3.2 运行程序
在终端中执行程序,运行一段时间后出现段错误。

然后在当前目录下生成了core文件。
3.3 gdb调试
命令格式 gdb + 程序名 + core文件。
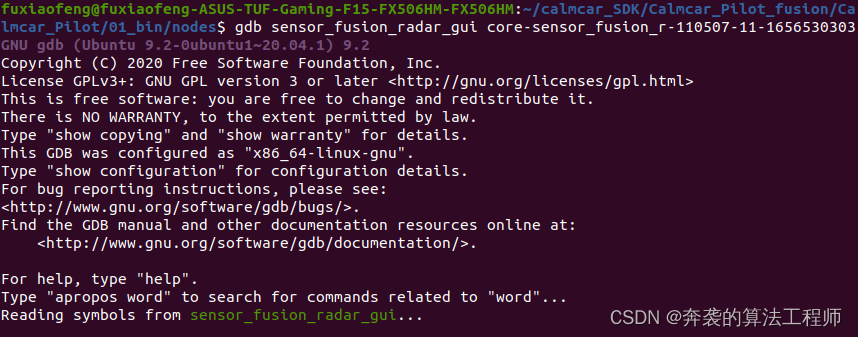
可以看到,正常读取了程序和core文件。继续查看更多信息,可以看到程序发生段错误,定位在头文件。

这个头文件是库文件,不是程序错误的根源,可以使用bt命令,显示调用关系。
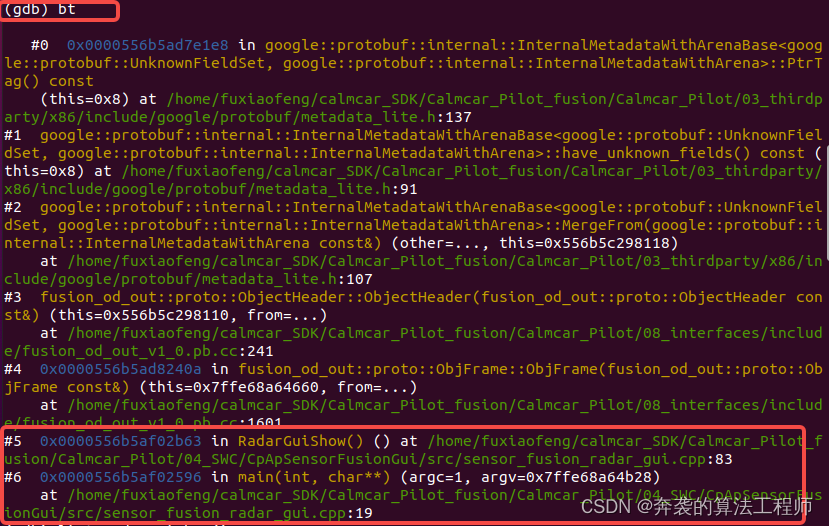
然后发现#5和#6定位到了错误代码的文件和行号,查看代码仔细分析发现是读取全局变量没有加锁导致冲突,引起段错误。
至此,通过gdb调试定位和发现了问题,更多操作可查看,文章中有很多细节和操作命令。
















 3782
3782











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











