







0.前言
现有的多传感器融合算法很少涉及多雷达融合算法,这里整理了多雷达融合算法的一些方法,分享出来共同探讨。
博客主要描述五个雷达融合算法的详细设计过程,包括数据接收、缓存、坐标转换、关联、滤波等过程。
1.数据接收和时间同步
融合算法接收前雷达和四个角雷达的数据,并开辟缓存存储这些数据。
如果存储数据超过队列长度,则删除队列头数据,新的数据放到队列尾部。
每个周期从缓冲读取最新数据,如果没有最新数据,则不更新融合目标,只做外推。
使用最新的数据作为量测,并作后续的关联滤波处理,融合的时间也和最新数据的时间保持同步。
如果发现时戳异常,则做相应判断和处理。
2.量测筛选
雷达的输入作为量测,但有些输入不符合融合指标要求,可按照动静、距离、方位等状态筛选感兴趣的输入作为量测。
对于后角雷达,由于后方只有它能覆盖,因此一般不做距离筛选,只做存在概率的筛选。
前雷达和前角雷达有较大重叠区域,而且通常前角雷达精度较低,特别在远处,横向偏差较大,因此可以只使用前角雷达中近程的目标。
3.坐标转换
所有的量测应当转换到统一坐标系下,需要确定每个雷达的安装位置和坐标系,并确定统一自车的坐标系,将雷达坐标转换到自车坐标系。
4.融合处理
4.1 起始策略
目标生成时按照存在概率、量测状态等进行筛选,同时记录传感器ID和量测ID。
4.2 多级关联策略
第1次关联:目标优先关联上一帧匹配的传感器ID和量测ID。
第2次关联:如果没有关联上匹配的目标,则在关联门限内搜索目标。
如果关联1个量测,则用这个量测更新。
如果关联多个量测,则计算量测的得分,距离速度越接近,得分越高。
第3次关联:放宽速度门限,在关联门限内搜索目标。
如果3次都关联不上,则用预测值更新融合目标,累计量测丢失时间;如果丢失时间过长,则删除目标。
5.跟踪滤波
根据目标特性设计运动模型和滤波算法,一般使用匀加速直线运动模型和卡尔曼滤波算法。
根据模型确定状态转移矩阵A,确定量测矩阵H
根据模型和算法确定初始的噪声协方差矩阵Q、R和P。
根据关联的目标和时间差更新噪声协方差矩阵Qk,Rk和Pk。
再根据卡尔曼滤波方程计算增益矩阵Kk,得到状态更新Xk。
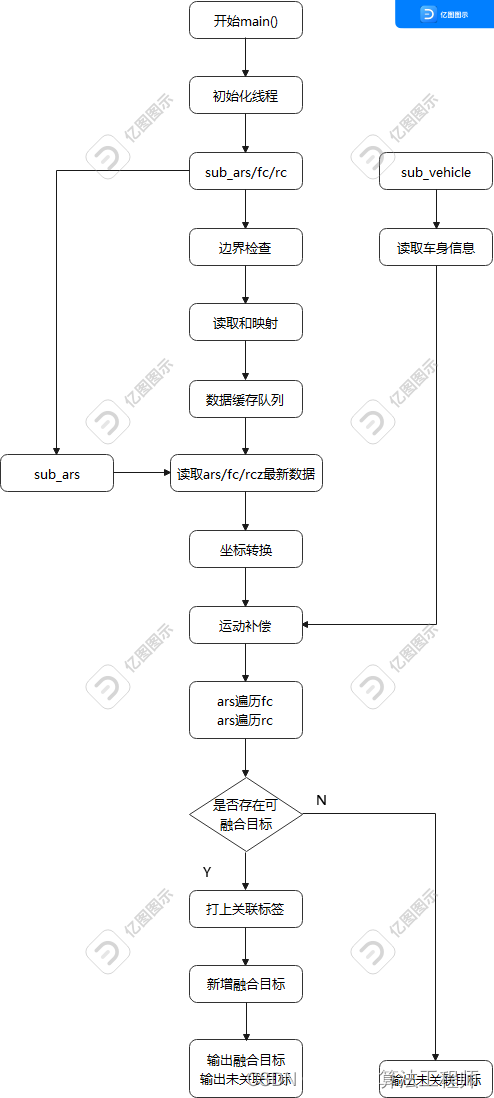
6.流程框图
下面是使用前雷达ars、前角雷达fc、后角雷达rc做的多雷达融合算法流程。
















 1371
1371











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











