







源码学习笔记:https://www.freesion.com/article/70841066392/
入门教程:https://www.ncnynl.com/archives/201910/3402.html
源码安装
网不好的话会出现:

rosdep update报错:
解决办法:
wget https://gitee.com/ncnynl/rosdep/raw/master/rosdep_update.sh
sudo chmod +x ./rosdep_update.sh
sudo ./rosdep_update.sh
然后执行rosdep update即可。
今天在家搭建AUTOWARE时,到这一步还是报错,明天去单位看看单位电脑还做了什么骚操作。重点关注文件为:
/usr/lib/python2.7/dist-packages/rosdep2/sources_list.py
/usr/lib/python2.7/dist-packages/rosdep2/rep3.py
/usr/lib/python2.7/dist-packages/rosdistro/init.py
单位电脑对应文件内容:
- /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py
DEFAULT_SOURCES_LIST_URL = ‘https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list’ - /usr/lib/python2.7/dist-packages/rosdep2/rep3.py
REP3_TARGETS_URL = ‘https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/releases/targets.yaml’ - /usr/lib/python2.7/dist-packages/rosdistro/init.py
DEFAULT_INDEX_URL = ‘https://ghproxy.com/https://raw.github.com/ros/rosdistro/master/index-v4.yaml’
回家按照公司电脑的文件进行更改,终于没有报错了,注意上边网址单引号为英文输入法状态下的。
关于无法定位软件包的问题,基本都是源的问题,电脑开网络权限,然后选用清华源基本可以解决。
编译工作区

sudo apt-get install ros-melodic-jsk-rviz-plugins

把系统更新打开,执行sudo apt-get update进行更新。
成功:
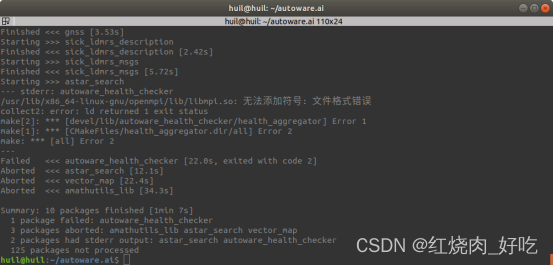
在源码编译过程中通常会遇到各式各样的问题,基本都是链接库的问题,链接库位置为:
/usr/lib/x86_64-linux-gnu/链接库没有的需要安装,链接不对的需要重新链接,好事多磨。
运行
运行界面花屏,叠屏
网上说的是wxpython版本的适配可能存在问题,更换了一个版本直接界面打不开了。打不开是因为版本还是不对应,解决办法:
在wxPython官网:https://extras.wxpython.org/wxPython4/extras/linux/gtk2/ubuntu-18.04/下载wxPython-4.0.7包,运行命令:
sudo python2.7 -m pip install --ignore-installed wxPython-4.0.7-cp27-cp27mu-linux_x86_64.whl 进行安装
重新源码编译autoware完美解决。















 1906
1906











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









