







文章目录
Towards Total Recall in Industrial Anomaly Detection
Summary
-
提出了一个memory bank
-
使用模型的中间层来获得features,减少通用性(低层)、对class的偏置(高层)
-
使用greedy coreset subsampling,对memory bank进行降采样,减少推理时间
Research Objective(s)
平衡inference time和performance
Method(s)
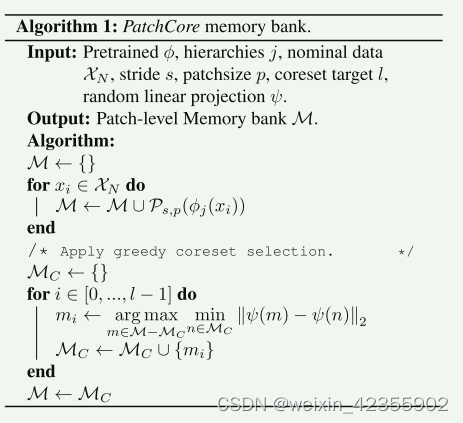
算法流程如下图所示
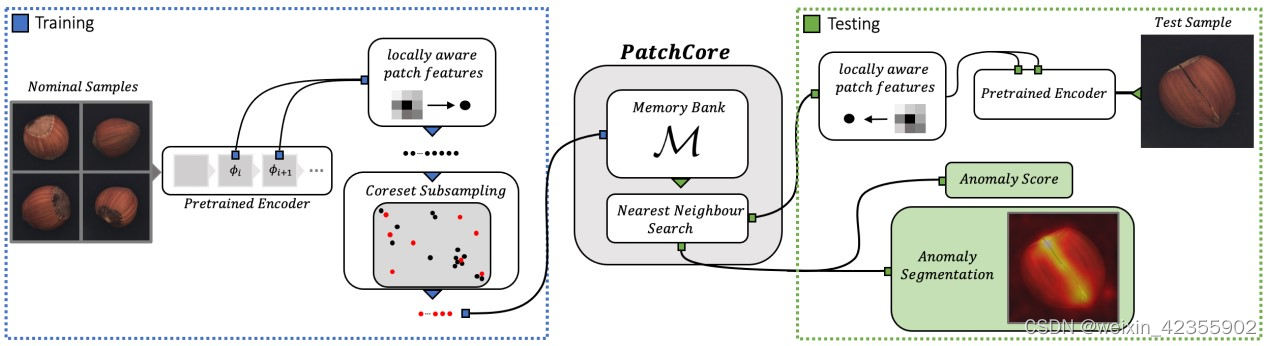
Locally aware patch features
imgs经过归一化后,images(2,3,224,224)
#提出layer2,layer3的输出,,[(2,512,28,28), (2,1024,14,14)]
features = self.forward_modules["feature_aggregator"](images)
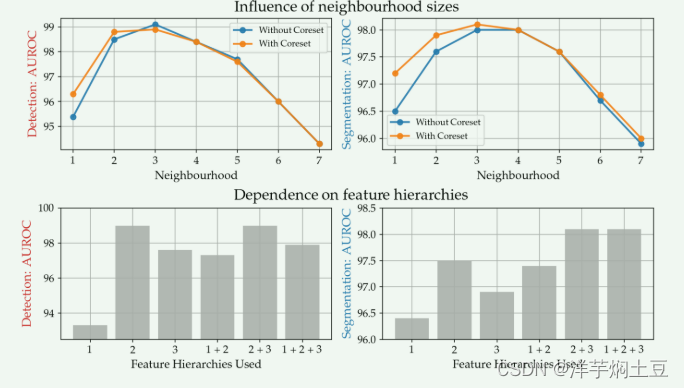
为什么选择layer2,layer3,下图中进行了对比
通过在局部邻域上进行特征聚合的方式来提取特征,作者p取3,这里 N p ( h , w ) \mathcal{N}_{p}^{(h,w)} Np(h,w)表示特征图上位置 (h,w)(ℎ,𝑤) 处大小为 p×p𝑝×𝑝 的一块patch
N p ( h , w ) = { ( a , b ) ∣ a ∈ [ h − ⌊ p / 2 ⌋ , . . . , h + ⌊ p / 2 ⌋ ] , b ∈ [ w − ⌊ p / 2 ⌋ , . . . , w + ⌊ p / 2 ⌋ ] } , \mathcal{N}_{p}^{(h,w)}=\{(a,b)|a\in[h-\lfloor p/2\rfloor,...,h+\lfloor p/2\rfloor],\\b\in[w-\lfloor p/2\rfloor,...,w+\lfloor p/2\rfloor]\}, Np(h,w)={(a,b)∣a∈[h−⌊p/2⌋,...,h+⌊p/2⌋],b∈[w−⌊p/2⌋,...,w+⌊p/2⌋]},
则位置 (h,w) 处的locally aware features如下:
ϕ i , j ( N p ( h , w ) ) = f a g g ( { ϕ i , j ( a , b ) ∣ ( a , b ) ∈ N p ( h , w ) } ) , \phi_{i,j}\left(\mathcal{N}_{p}^{(h,w)}\right)=f_{\mathrm{agg}}\left(\{\phi_{i,j}(a,b)|(a,b)\in\mathcal{N}_{p}^{(h,w)}\}\right), ϕi,j(Np(h,w))=fagg({ϕi,j(a,b)∣(a,b)∈Np(h,w)}),
文中,fagg表示邻域特征向量的聚合函数,使用adaptive average pooling自适应平均池。
#提取locally aware features
features = [self.patch_maker.patchify(x, return_spatial_info=True) for x in features]
# ->[(2, 784, 512, 3, 3),(2, 196, 1024, 3, 3)]
######################################################################
#解析patchify作用
def patchify(self, features, return_spatial_info=False):
"""Convert a tensor into a tensor of respective patches.
Args:
x: [torch.Tensor, bs x c x w x h]
Returns:
返回patch,所有图像的patcch堆叠在一起
x: [torch.Tensor, bs * w//stride * h//stride, c, patchsize,
patchsize]
"""
# 计算补丁的填充和展开,这里patch_size=3,stride=1,padding=1 ,28*28输出 28*28,torch.nn.Unfold 和卷积核差不多但是unfold是滑动到某一位置,直接取出输入张量中对应位置的值,然后flatten成一个一维向量,放到输出张量的对应位置处。(2,512,28,28)->(2,4608,784),其中4608=3*3*512,784=28x28。经过patchify提出的邻域特征表示维度分别为(2, 784, 512, 3, 3)、(2, 196, 1024, 3, 3),其中784=28x28, 196=14x14。
padding = int((self.patchsize - 1) / 2)
unfolder = torch.nn.Unfold(
kernel_size=self.patchsize, stride=self.stride, padding=padding, dilation=1
)
unfolded_features = unfolder(features) # (2,512,28,28)->(2,4608,784)
# 计算补丁的数量,和卷积计算公式一样
number_of_total_patches = []
for s in features.shape[-2:]: # (28,28)
n_patches = (
s + 2 * padding - 1 * (self.patchsize - 1) - 1
) / self.stride + 1
number_of_total_patches.append(int(n_patches)) # (28,28)
# 重塑未折叠特征张量
unfolded_features = unfolded_features.reshape(
*features.shape[:2], self.patchsize, self.patchsize, -1
) # (2,512,3,3,784)
unfolded_features = unfolded_features.permute(0, 4, 1, 2, 3) # (2,784,512,3,3)
if return_spatial_info: # True,则返回unfolded_features和补丁数量,否则只返回unfolded_features。
return unfolded_features, number_of_total_patches
return unfolded_features
由于features的维度[(2, 784, 512, 3, 3),(2, 196, 1024, 3, 3)]不一致,需要对layer3的输出进行bilinear插值使之与layer2匹配,
features = [features[layer] for layer in self.layers_to_extract_from]
features = [
self.patch_maker.patchify(x, return_spatial_info=True) for x in features
] # [(2, 784, 512, 3, 3),(2, 196, 1024, 3, 3)]
patch_shapes = [x[1] for x in features] #
features = [x[0] for x in features]
ref_num_patches = patch_shapes[0]
# 对layer3的输出以匹配layer3的补丁数量
for i in range(1, len(features)):
_features = features[i]
patch_dims = patch_shapes[i]
# TODO(pgehler): Add comments
_features = _features.reshape(
_features.shape[0], patch_dims[0], patch_dims[1], *_features.shape[2:]
) # (2, 14,14 , 1024, 3, 3)
_features = _features.permute(0, -3, -2, -1, 1, 2) # (2,1024, 3, 3,14,14 )
perm_base_shape = _features.shape
_features = _features.reshape(-1, *_features.shape[-2:]) # ( 18432,14,14)
_features = F.interpolate(
_features.unsqueeze(1),
size=(ref_num_patches[0], ref_num_patches[1]),
mode="bilinear",
align_corners=False,
) # 对layer3进行线性插值-> ( 18432,28,28)
_features = _features.squeeze(1)
_features = _features.reshape(
*perm_base_shape[:-2], ref_num_patches[0], ref_num_patches[1]
) # ->(2, 1024, 3, 3, 28, 28)
_features = _features.permute(0, -2, -1, 1, 2, 3) #
_features = _features.reshape(len(_features), -1, *_features.shape[-3:])
features[i] = _features # (2, 784, 1024, 3, 3)
features = [x.reshape(-1, *x.shape[-3:]) for x in features] # ->(1568, 512, 3, 3), (1568, 1024, 3, 3)
然后通过自适应平均池化进行特征聚合,即fagg:训练模型输出feature map上的每个位置(h, w),都得到一个预先设定维度 d= 1024的单一表示,这样这样layer2、layer3的聚合特征[(1568, 512, 3, 3), (1568, 1024, 3, 3)]经过预处理,即分别经过自适应均值池化然后stack一起得到 (1568,2,1024)的输出特征。
features = self.forward_modules["preprocessing"](features)# (1568,2,1024)
######################################################################
# 解析adaptive_avg_pool1d 池化聚合
class MeanMapper(torch.nn.Module):
def __init__(self, preprocessing_dim):
super(MeanMapper, self).__init__()
self.preprocessing_dim = preprocessing_dim
def forward(self, features):
features = features.reshape(len(features), 1, -1) # (1568,512,3,3)->(1568,1,4608)
return F.adaptive_avg_pool1d(features, self.preprocessing_dim).squeeze(1) # (1568,1,4608)->(1568,1024)
class Preprocessing(torch.nn.Module):
def __init__(self, input_dims, output_dim):
super(Preprocessing, self).__init__()
self.input_dims = input_dims # [512,1024]
self.output_dim = output_dim # 1024
self.preprocessing_modules = torch.nn.ModuleList()
for input_dim in input_dims:
module = MeanMapper(output_dim)
self.preprocessing_modules.append(module)
def forward(self, features): # [(1568,512,3,3),(1568,1024,3,3)]
_features = []
for module, feature in zip(self.preprocessing_modules, features):
_features.append(module(feature)) # [(1568,1024),(1568,1024)]
return torch.stack(_features, dim=1) # (1568,2,1024)
再进一步进行特征聚合
features = self.forward_modules["preadapt_aggregator"](features)# (1568,1024)
######################################################################
#解析adaptive_avg_pool1d 池化聚合
class Aggregator(torch.nn.Module):
def __init__(self, target_dim):
super(Aggregator, self).__init__()
self.target_dim = target_dim
def forward(self, features):
"""Returns reshaped and average pooled features."""
# batchsize x number_of_layers x input_dim -> batchsize x target_dim
features = features.reshape(len(features), 1, -1) # (1568,2,1024)->(1568,1,2048)
features = F.adaptive_avg_pool1d(features, self.target_dim)# (1568,1,1024)
return features.reshape(len(features), -1)# (1568,1024)
features = np.concatenate(features, axis=0) # 得到训练集的所有feature。per batch两张图片的输出为(1568, 1024),100张图片features map即为 (50 * 1568,1024),这样就提出了提取locally aware features, 这里locally aware,是patch的p=3,1568= 2*(smoothing num:28*28)
Coreset-reduced patch-feature memory bank
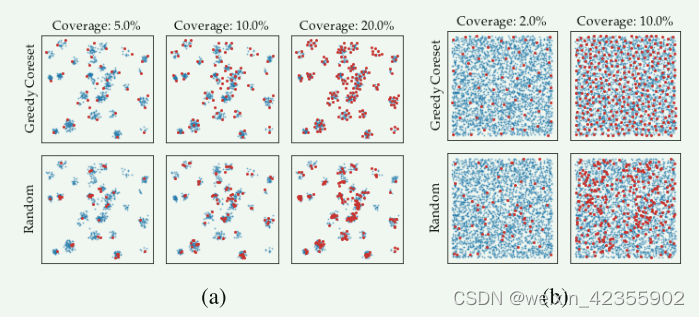
很显然随着图片的增多,features的增大,memory bank也变得越来越大,所以需要进行降采样,本文中选择 Greedy Coreset进行降采样(文中对比了随机降采样),即每次选取离核心集最远的点加入核心集:
下图对比了降采样率效果:
features = self.featuresampler.run(features)
######################################################################
#解析
def run(
self, features: Union[torch.Tensor, np.ndarray]
) -> Union[torch.Tensor, np.ndarray]:
"""Subsamples features using Greedy Coreset.
Args:
features: [N x D]
"""
if self.percentage == 1: # 代码选取了降采样率为0.1
return features
self._store_type(features)
if isinstance(features, np.ndarray):
features = torch.from_numpy(features)
reduced_features = self._reduce_features(features) # 为了寻找核心集速度(78400,1024)->(78400,128)
sample_indices = self._compute_greedy_coreset_indices(reduced_features)# 通过 Greedy Coreset寻找核心集的索引
features = features[sample_indices] # 降采样 (78400,1024)->(7840,1024)
return self._restore_type(features)
def _reduce_features(self, features):
if features.shape[1] == self.dimension_to_project_features_to:
return features
mapper = torch.nn.Linear(
features.shape[1], self.dimension_to_project_features_to, bias=False
) # 通过线性映射WX 降低d的维度减少内存占用
_ = mapper.to(self.device)
features = features.to(self.device)
return mapper(features)
def _compute_greedy_coreset_indices(self, features: torch.Tensor) -> np.ndarray:
"""Runs approximate iterative greedy coreset selection.
近似的贪心核心集选择算法,减少内存需求但增加了采样时间。
This greedy coreset implementation does not require computation of the
full N x N distance matrix and thus requires a lot less memory, however
at the cost of increased sampling times.
Args:
features: [NxD] input feature bank to sample.
"""
number_of_starting_points = np.clip(
self.number_of_starting_points, None, len(features)
)
start_points = np.random.choice(
len(features), number_of_starting_points, replace=False
).tolist()# 随机选择十个点
approximate_distance_matrix = self._compute_batchwise_differences(
features, features[start_points]
)#所有feature与这10个features的距离,得到近似的距离矩阵,这是一种内存效率更高的方法,因为它避免了计算完整的 N x N 距离矩阵。
#
approximate_coreset_anchor_distances = torch.mean(
approximate_distance_matrix, axis=-1
).reshape(-1, 1)
coreset_indices = []
num_coreset_samples = int(len(features) * self.percentage)
with torch.no_grad():
for _ in tqdm.tqdm(range(num_coreset_samples), desc="Subsampling..."):
select_idx = torch.argmax(approximate_coreset_anchor_distances).item() # 与这10个features的最远的feature
coreset_indices.append(select_idx)
coreset_select_distance = self._compute_batchwise_differences(
features, features[select_idx : select_idx + 1] # noqa: E203
)# 其他feature与此feature的距离
approximate_coreset_anchor_distances = torch.cat(
[approximate_coreset_anchor_distances, coreset_select_distance],
dim=-1,
)
approximate_coreset_anchor_distances = torch.min(
approximate_coreset_anchor_distances, dim=1
).values.reshape(-1, 1)
return np.array(coreset_indices)
def _compute_greedy_coreset_indices(self, features: torch.Tensor) -> np.ndarray:
"""Runs iterative greedy coreset selection.
完整的贪心核心集选择算法
Args:
features: [NxD] input feature bank to sample.
"""
distance_matrix = self._compute_batchwise_differences(features, features)
coreset_anchor_distances = torch.norm(distance_matrix, dim=1)# 每个feature和其他feature的距离的sum
coreset_indices = []
num_coreset_samples = int(len(features) * self.percentage)
for _ in range(num_coreset_samples): # 每次迭代选择距离最远的样本加入核心集,并更新核心集锚点距离
select_idx = torch.argmax(coreset_anchor_distances).item() #选出和其他feature最远的那个feature的index
coreset_indices.append(select_idx)# 添加索引
coreset_select_distance = distance_matrix[
:, select_idx: select_idx + 1 # noqa E203
]# 其他feature与此feature的距离
coreset_anchor_distances = torch.cat(
[coreset_anchor_distances.unsqueeze(-1), coreset_select_distance], dim=1
)
coreset_anchor_distances = torch.min(coreset_anchor_distances, dim=1).values# 更新每个特征与所有已选择的核心集特征的最小距离。
# 这样每次都更新coreset_anchor_distances中每个feature与核心集的最短距离
return np.array(coreset_indices)
Anomaly Detection with PatchCore
代码中使用faiss实现knn搜索
self.anomaly_scorer.fit(detection_features=[features]) # Faiss实现最近邻检索和距离计算
##########################################
#解析
def _create_index(self, dimension):
if self.on_gpu:
return faiss.GpuIndexFlatL2(
faiss.StandardGpuResources(), dimension, faiss.GpuIndexFlatConfig()
)
return faiss.IndexFlatL2(dimension) #创建索引
def fit(self, features: np.ndarray) -> None:
"""
Adds features to the FAISS search index.
Args:
features: Array of size NxD.
"""
if self.search_index:
self.reset_index()
self.search_index = self._create_index(features.shape[-1]) # 创建索引
self._train(self.search_index, features)
self.search_index.add(features)# add vectors to the index
test image图像进行loacl features的提取,对于每个loacl features,计算其到memory bank最近邻特征的距离作为异常得分,reshape在进行线性插值得到最后的热力图。在代码实现中,没有使用到公式7。公式7表明,若memory bank中对应最近的feature已经是memory bank中比较孤立的,需要乘上一个scale以增加其异常分数,个人认为代码没做的原因是需要对memory bank中的每个feature再算b个k近邻,增加了时间开销而没有实现
公式6,评估异常分数S,代码中S是test patch feature与memory bank中的最近的1个feature的距离作为异常分数
PS:不知道公式中的最大体现在,个人理解是如果没有进行降采样,memory bank每个聚类中有很多个feature,这样就要选取离这个聚类中最远那一个的距离作为异常分数,而降采样后每个feature就是一个聚类
_scores, _masks = self._predict(image) # image:输入图像,_scores:异常得分,_masks:(2,224,224)每轮test的heatmaps
#省略~~~ 循环结束后整合得到segmentations
min_scores = (
segmentations.reshape(len(segmentations), -1)
.min(axis=-1)
.reshape(-1, 1, 1, 1)
)#(196,224,224)中的最小值
max_scores = (
segmentations.reshape(len(segmentations), -1)
.max(axis=-1)
.reshape(-1, 1, 1, 1)
)
segmentations = (segmentations - min_scores) / (max_scores - min_scores) #(196,224,224) 对整个数据归一化,得到整test的heatmaps
################################################
#解析self._predict
# 对test image预测
def _predict(self, images):
"""Infer score and mask for a batch of images."""
images = images.to(torch.float).to(self.device)
_ = self.forward_modules.eval()
batchsize = images.shape[0] # 2
with torch.no_grad():
features, patch_shapes = self._embed(images, provide_patch_shapes=True) # 提取local features, 其中1568=2x28x28, 28x28是patch平滑取值的次数
features = np.asarray(features) # (1568,1024)
patch_scores = image_scores = self.anomaly_scorer.predict([features])[0] #(1568,1) 对于每个查询特征,计算其到最近邻特征的距离作为异常得分
image_scores = self.patch_maker.unpatch_scores(
image_scores, batchsize=batchsize
) # (1568,) -> ( 2, 784)
image_scores = image_scores.reshape(*image_scores.shape[:2], -1) #( 2, 784) ->( 2, 784 ,1 )
image_scores = self.patch_maker.score(image_scores)
patch_scores = self.patch_maker.unpatch_scores(
patch_scores, batchsize=batchsize
) # # (1568,) -> ( 2, 784)
scales = patch_shapes[0] # (28,28)
patch_scores = patch_scores.reshape(batchsize, scales[0], scales[1]) # ( 2, 28,28 )
masks = self.anomaly_segmentor.convert_to_segmentation(patch_scores) # 异常得分reshape线性插值 ( 2, 28,28 ) -> mask:( 2, 224,224 ),然后高斯滤波平滑噪声
return [score for score in image_scores], [mask for mask in masks]
# 解析self.anomaly_scorer.predict
def predict(
self, query_features: List[np.ndarray]
) -> Union[np.ndarray, np.ndarray, np.ndarray]:
"""Predicts anomaly score.
Searches for nearest neighbours of test images in all
support training images.
Args:
detection_query_features: [dict of np.arrays] List of np.arrays
corresponding to the test features generated by
some backbone network.
"""
features = self.feature_merger.merge(
query_features,
)
query_distances, query_nns = self.imagelevel_nn(query_features) # 这里k取为1,return:(1568,1),(1568,1) 返回查询的最近距离和索引
anomaly_scores = np.mean(query_distances, axis=-1) #(1568,1) 对于每个查询特征,计算其到最近邻特征的距离作为异常得分。
return anomaly_scores, query_distances, query_nns #
最后得到第i个test的热力图(196,224,224)->(i,224,224),















 2056
2056

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









