







关键词
嵌入式、C语言、autosar、OS、BSW
平台说明
| 项目 | Value |
|---|---|
| OS | autosar OS |
| autosar厂商 | vector , EB |
| 芯片厂商 | TI 英飞凌 |
| 编程语言 | C,C++ |
| 编译器 | HighTec (GCC) |
| autosar版本 | 4.3.1 |

| 缩写 | 描述 |
|---|---|
| ECUC | Ecu Configuration |
一、ECUC 的定义
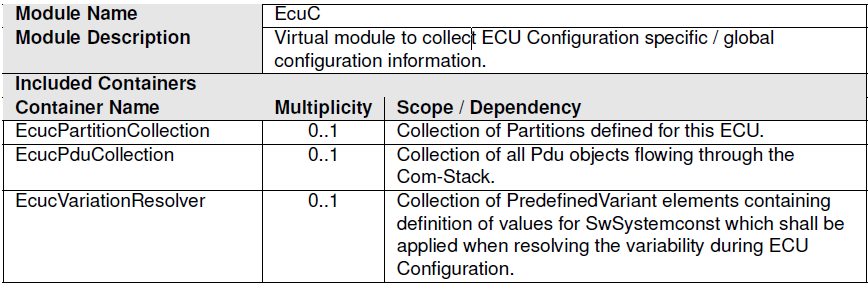
在ECU的配置中,有一些信息需要在多个BSW模块之间共享。由于无法定义谁拥有该共享信息,因此将虚拟模块EcuC引入AUTOSAR ECU配置参数定义。在ECUC中包含了三部分,
EcucPartitionCollection,EcucPduCollection,EcucVariationResolver,如下表所示:
二、Definition of Partitions
为了支持memory-partitioning 和multi-core,EcuC虚拟模块中引入了EcucPartition的概念。
EcuC模块可以有一个EcucPartitionCollection,它可以保存任意数量的EcucPartition元素。memory-partitioning支持在swc组周围创建保护边界。通过对SW组件实例的EcucPartitionSoftwareComponentInstanceRef引用,可以将SWCs分配到EcucPartitions。EcucPartition由操作系统内部的OS- application实现。因此,swc到partitions映射限制了可运行程序到任务的映射,如下图所示。
EcucPartition(1) 可以包含(多个)OS_application(2),OS的五大基本对象(COUNTER,ALARM,ISRS,TASK,SCHEDULE TABLE)又依赖于OS_application。
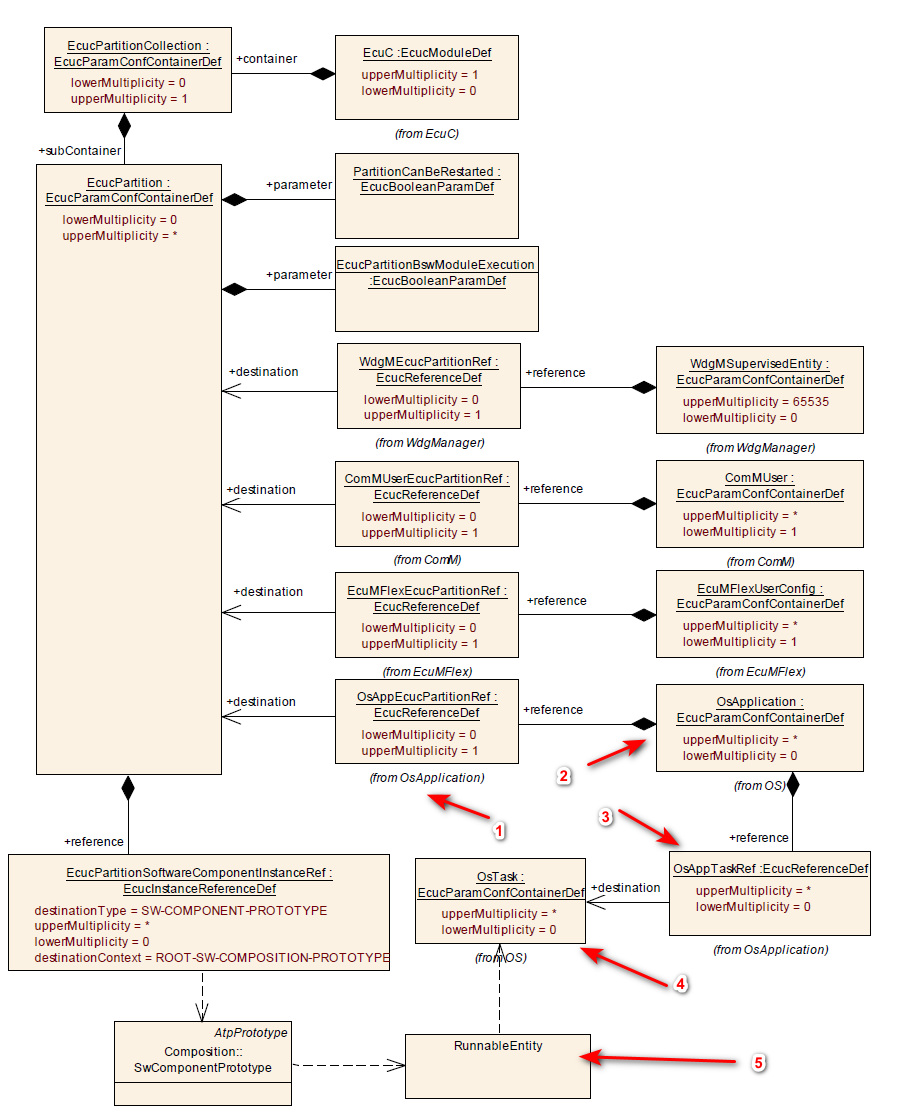
设计原则是,在创建partition之后,将软件(SWC)映射到该分区。在第二步中,配置BSW,分区的每个成员(BSW)定义对EcucPartition元素的引用。
三、Variant Resolver Description
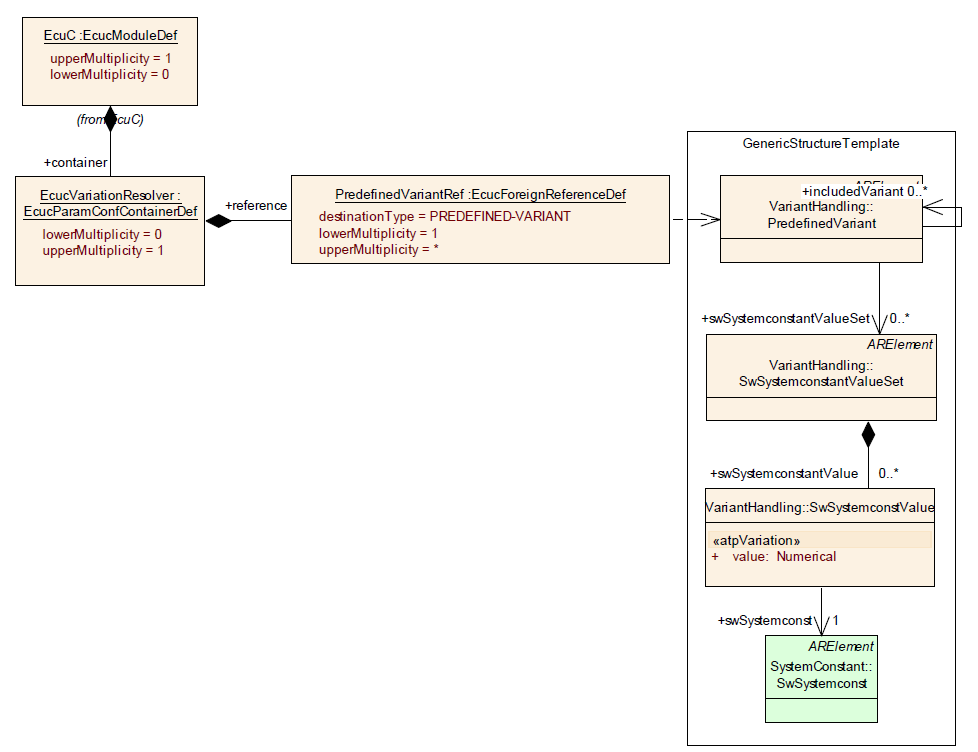
为了支持变体的可操作性,使用SwSystemconstValueSet,SwSystemconstValueSet已经收集了系统参数常量。在EcuC中,适用的SwSystemconstValueSet元素通过PredefinedVariant集合间接引用。
四、Definition of PDUs
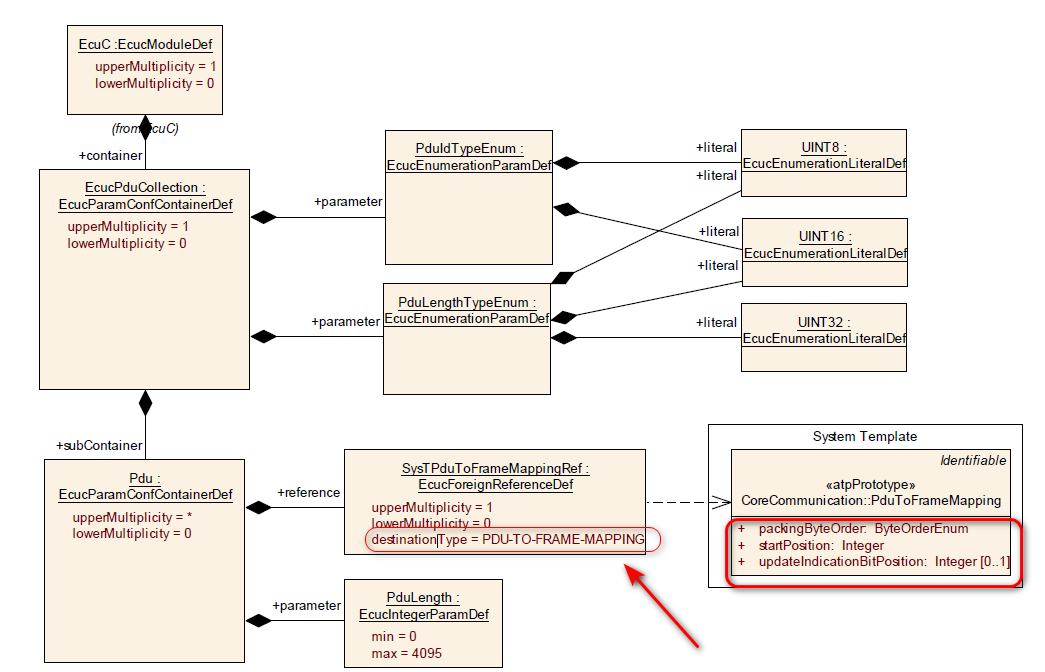
为了支持Handle IDs 的同步,两个模块需要能够引用同一个PDU对象。因此,定义了一个通用的Pdu容器,它不属于任何模块,而是定义在EcuC模块中。
由于流经COM-Stack的PDU不属于单个模块,因此在ECU配置中引入了“虚拟”模块EcuC。该模块用于收集不与任何特定的标准化模块关联的配置信息,说人话就是:ECUC中包含了PDU通过整个COM stack 的路径信息。
EcucPduCollection可能包含几个“全局”Pdu对象,如下图所示。每个Pdu可能代表一个来自AUTOSAR System Description(ECU Extract)的实际PduToFrameMapping(即路径),因此在System Template中有一个可选的元素引用。改引用是可选的,因为仅在ECU内传输的pdu不一定是ECU Extract的一部分。特别是传输协议模块处理的PDU在ECU Extract中没有表示(有一个由PDU object,示的PDU通过总线,但是当TP进行转换时,创建了一个新的PDU,然后将其转发给上层。这个创建的Pdu没有对PduToFrameMapping的引用。)



















 945
945

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











