







参考了
一个模型预测控制(MPC)的简单实现
https://www.cnblogs.com/zhjblogs/p/13880682.html
与
基于MPC的移动机器人轨迹跟踪控制matlab例程
https://blog.csdn.net/a735148617/article/details/113784730
上一篇写了如何使用qpOASES
https://blog.csdn.net/weixin_42454034/article/details/118600394
这里是如何将其应用在MPC中。
为了最大的简化,这里使用了机器人控制速度到达目标点的模型,并且机器人只有一个方向的自由度。
第一步移动机器人建模:
首先构建系统状态方程为:

在这里
第二步离散化:
在k时刻有

其中T为控制间隔时长。
移项后可得:

所以有:
第三步预测
在第一个参考里面有详细的说明。
我们记未来 P个控制周期内预测的系统状态为:

测时域内的控制量Uk:

通过离散化状态方程依次对未来 P个控制周期的系统状态进行预测

整合成矩阵形式:

第四步优化
参考轨迹为:

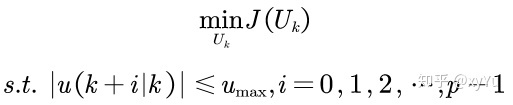
优化目标函数为:

其中Q状态误差权重,对角阵;W为输出权重,对角阵。
该优化问题可以描述如下:
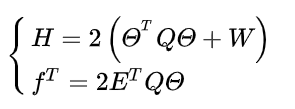
将优化函数 展开后合并同类项:
在此注意一下,qpOASES中求解格式为:

所以要将其展开为要求的格式。
在参考一中其展开的形式为:

它展开后的第二项与qpOASES中格式不一致,但是刚刚好是qpOASES要求的格式是其第二项的转置。
参考中也说明了UTthitaTQE与ET Q * thita * U相等的原因。
所以在代码中转置一下就行。
根据qpOASES格式。
g = fT的转置。
代码中仿真应用:
在ubutu20.04中使用webots仿真环境,首先建立一个简单的仿真机器人.

只控制机器人一个方向上的速度。
然后需要安装eigen 和qpOASES。之前文档中写了ubuntu20.04下eigen 安装及qpOASES的安装
随后编写控制器,加入MPC控制。
在这贴出代码的主要部分:
xk(0,0) = pos;
for(int i=0 ; i<P;i++){
fei(i,0) = pow(A_,i+1);
}
// cout <<"fei "<<fei <<"\n";
for(int i=0; i <P;++i){
for(int j=0; j <=i;++j){
theta(i,j)= pow(A_,i-j)*B_;
}
}
//cout <<"theta"<<theta <<"\n";
E = fei*xk-Rk;
H = 2.0*(theta.transpose()*Q*theta+W); //求矩阵的转置
f = (2.0*E.transpose()*Q*theta).transpose();
g = f.transpose(); //g为f的转置
// cout <<E <<"\n" << H <<"\n" <<f <<"\n";
//转为qpOASES格式
for(int i =0;i<H.rows();i++)
{
for(int j=0;j<H.cols();j++)
{
H_matrix[(i)*H.cols()+j] = H(i,j);
}
g_matrix[i] = g(0,i);
}
int_t nWSR = 10;
v_pro.init(H_matrix, g_matrix, lb_matrix, ub_matrix, nWSR);
real_t xOpt[2];
v_pro.getPrimalSolution( xOpt );
printf( "\nxOpt = [ %e, %e ]; objVal = %e\n\n", xOpt[0],xOpt[1],v_pro.getObjVal() );
setV(xOpt[0],timeStep);
// setV(0.5,timeStep);
//pos = pos + xOpt[0]*T ;
pos = robot->getSelf()->getPosition()[0]; //机器人位置
printf("pos:%f\n",pos);
设定目标为运行到2m位置,
运行后效果如下:
最后与matlab中对比一下,matlab中代码如下
clc; clear;
T_long = 2; %总时长2s
T=0.05; %控制间隔
P = 5; %预测长度
Q = 10*eye(P); %状态误差权重
W = 0.1*eye(P); %控制输出权重
Rk = zeros(P,1); %参考值序列
Rk(1:end) = 2;%参考位置由函数参数指定
vmax = 1;
lb = zeros(P,1); %最小输出
lb(1:end) = -vmax;
ub = zeros(P,1); %最大输出
ub(1:end) = vmax;
pos(1) = 0 ; %当前状态
for t=1:50 %步数
%构建中间变量
xk = pos(t); %当前状态量
A_ = 1;
B_ = T;
fei = zeros(P,1); %AK
for i=1:1:P
fei(i) = A_^i;
end
theta =size(P,P); %BK
for i=1:1:P
for j=1:1:i
theta(i,j)=A_^(i-j)*B_;
end
end
E = fei*xk-Rk; %E
H = 2*(theta'*Q*theta+W) %H
f = (2*E'*Q*theta)' %f
Uk=quadprog(H,f,[],[],[],[],lb,ub);
Uk(1)
pos(t)
pos(t+1) = pos(t) + Uk(1)*T;% + Uk(1)*T*unifrnd(-0.2,0.2); %位置自己加
end
plot(pos)
运行结果如图,通过修改Q 或者W能够改变位置曲线。

项目githup地址
使用webots2020b,在ubuntu20.04下。















 1110
1110











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









