









视觉SLAM,一种结合了CV与机器人技术的先进方法。与激光SLAM相比,它成本低廉且信息量大,易于安装,拥有更优秀的场景识别能力,因此在自动驾驶等许多场景上都非常适用,是学术界与工业界共同关注的热门研究方向。
但传统的视觉SLAM也面临着一些挑战和局限性,比如在低光或强光照环境下性能下降、不太适合处理动态场景或高速移动等。为此,研究者们提出了许多改进方案。
效果很赞的如最新提出的NGD-SLAM,既能保证效率和精度,又无需GPU,是行业第一个达到此目标的视觉动态SLAM系统。另外还有基于3D高斯SLAM系统,猛超SOTA实现了渲染速度提升176%,内存使用减少150%的炸裂效果。
我今天就帮各位整理了12个最新发布且超高质量的视觉SLAM改进方案,代码开源的都有,强烈建议想发论文的同学研读。
论文原文+开源代码需要的同学看文末
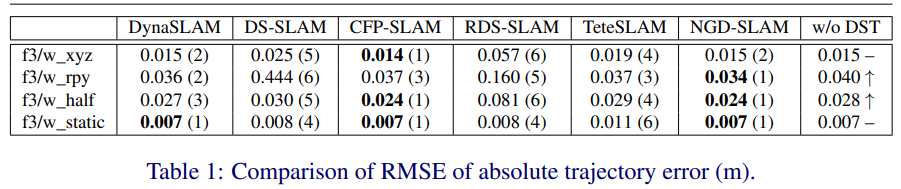
NGD-SLAM: Towards Real-Time SLAM for Dynamic Environments without GPU
方法:本文提出了一种新颖的视觉SLAM系统,在CPU上实现了实时性能。通过引入一个独立的mask预测机制来减轻使用深度学习模型带来的低效问题,同时保持了动态目标识别的高准确性,并采用了双阶段跟踪方法来进一步提高系统的效率。
NGD-SLAM作为一个无需GPU支持的视觉SLAM系统,在动态环境中实现了56帧每秒的高跟踪帧率,同时保持了与最先进的方法相当的定位精度。

创新点:
-
引入了一个独立于框架的掩码预测机制,使相机跟踪和动态对象分割能够同时进行,而不需要等待对方的输出。
-
开发了一个双阶段跟踪方法,使用光流方法跟踪识别出的动态和静态特征,以及将光流和ORB特征的优势结合起来进行相机跟踪。
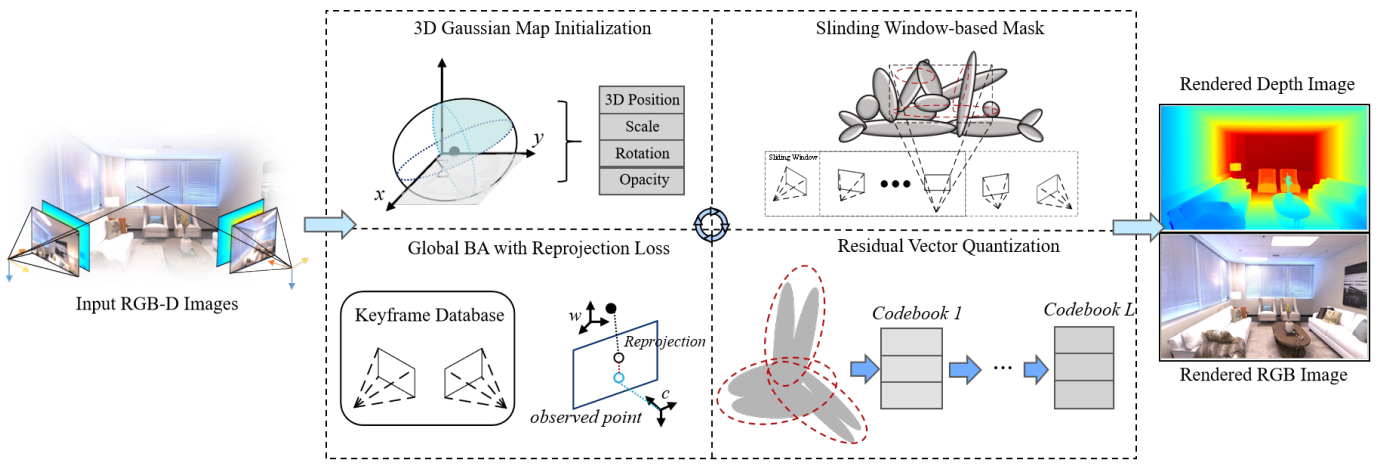
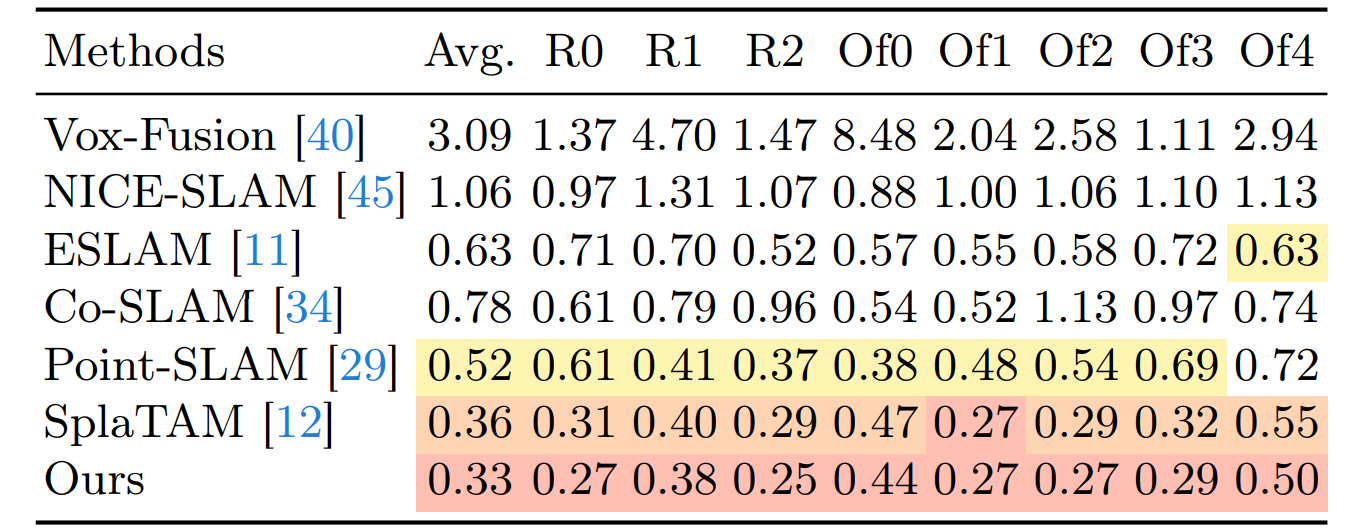
Compact 3D Gaussian Splatting For Dense Visual SLAM
方法:论文提出了一个名为“Compact 3D Gaussian Splatting SLAM”的系统,旨在解决现有基于3D高斯(Gaussian)的SLAM方法中存在的问题,如高内存和存储成本以及训练速度慢。
该系统在保持与现有最先进方法相当的高质量场景表示的同时,实现了训练速度提升33%,渲染速度提升176%,内存使用减少150%。
创新点:
-
提出了一种全面的密集视觉SLAM系统,实现了高保真性能、快速训练、紧凑性和实时渲染。
-
提出了一种可学习的滑动窗口遮罩策略,用于减少冗余的三维高斯椭球体数量,从而实现高保真性能。
-
设计了一种新颖的基于滑动窗口的在线遮罩方法,以在SLAM系统操作期间移除冗余的高斯椭球体数量,实现更快的渲染速度和高效的内存使用。
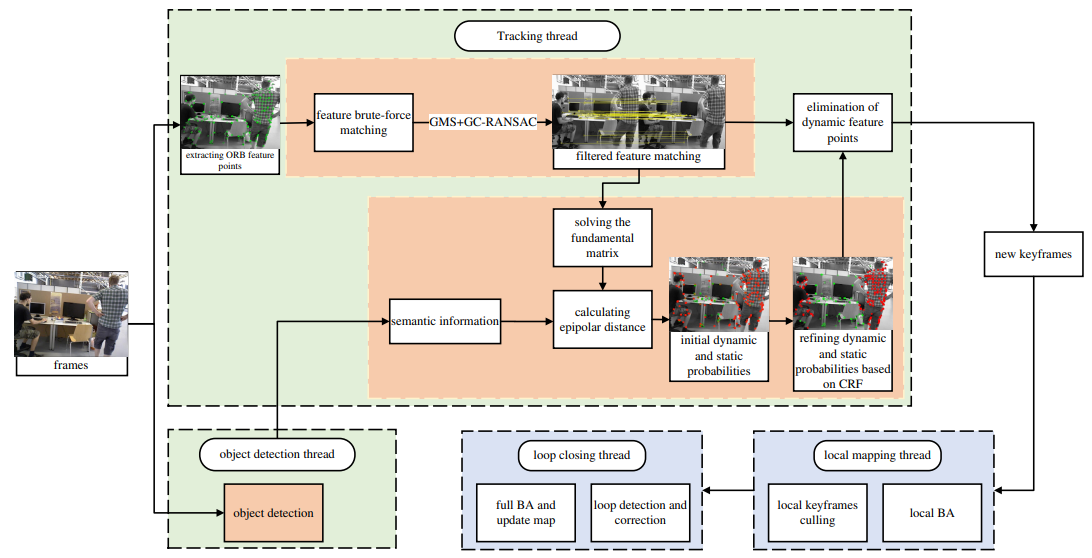
GGC-SLAM: A VSLAM System Based on Predicted Static Probability of Feature Points in Dynamic Environments
方法:论文介绍了一种基于特征点静态概率的动态环境下的视觉同时定位与建图(VSLAM)系统,名为GGC-SLAM。GGC-SLAM系统结合了ORB-SLAM2框架,并引入了轻量级物体检测、基于网格的运动统计(GMS)和随机采样一致性图割(GC-RANSAC)算法。
在TUM公共数据集和真实世界环境中进行的评估表明,GGC-SLAM能够有效地处理动态场景中的动态特征点,同时确保实时操作。在高动态场景中,与ORB-SLAM2相比,该系统的平均绝对轨迹误差降低了约90%。
创新点:
-
提出了一种特征匹配优化方法,引入了基于网格的运动统计(GMS)和图割随机抽样一致性(GC-RANSAC)算法。该方法能够从大量的粗匹配中有效地筛选出高质量匹配,并精确解决基础矩阵。
-
作者结合语义信息和对极约束,初步预测了特征点的静态概率。通过GC-RANSAC求解的基础矩阵确定了对极约束,而轻量级目标检测网络SSD则快速获取了语义信息。
-
构建了一个基于几何关系和条件随机场的特征点概率模型,通过整合先验的静态概率信息和分析一系列帧中的观测,进一步细化了特征点的动态和静态属性的判断。

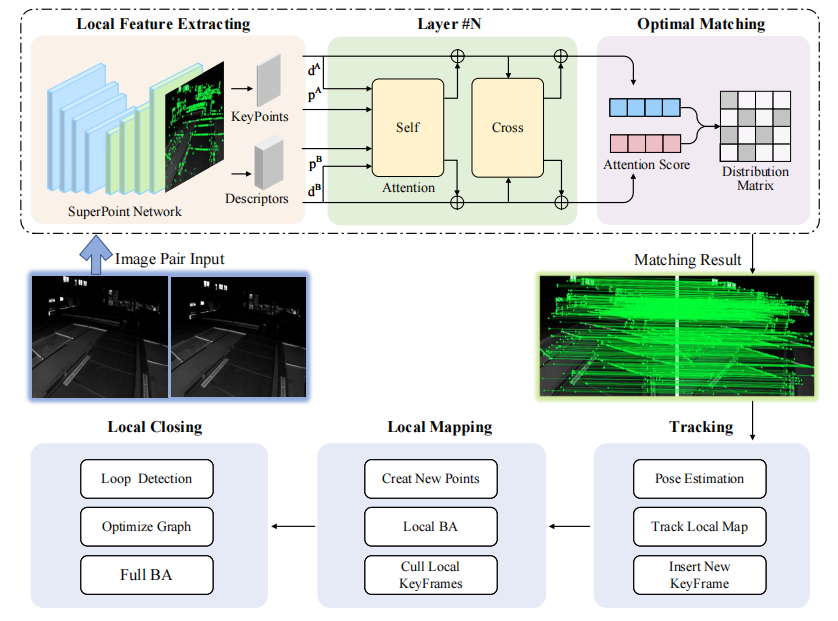
Light-SLAM: A Robust Deep-Learning Visual SLAM System Based on LightGlue under Challenging Lighting Conditions
方法:本文提出了一种基于深度学习网络的Light-SLAM系统,将深度学习网络成功应用于传统视觉SLAM技术,实现了在不同时间和具有挑战性的光照条件下的稳健和高精度的实时定位。
Light-SLAM 在适应不同时间段的光照变化环境方面表现优越,显著提高了系统的鲁棒性和准确性,同时能够在 GPU 上实时运行。
创新点:
-
使用深度学习网络成功将深度学习应用于传统的视觉SLAM技术,实现了在不同时间和具有挑战性的光照条件下的鲁棒且高精度的实时定位。
-
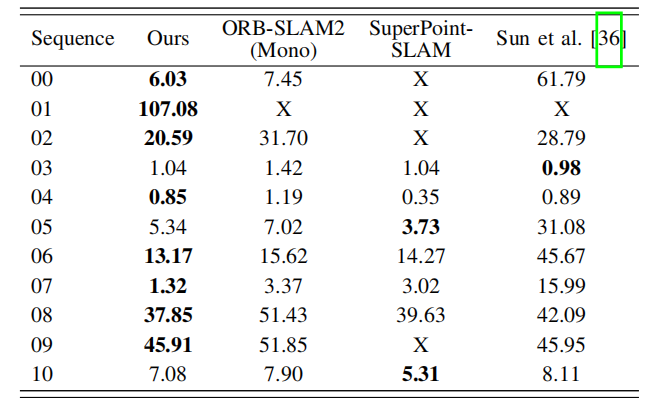
在许多实验中,Light-SLAM在准确性和鲁棒性方面优于传统的基于手工特征和基于深度学习的方法,甚至在挑战性的低光场景中也能克服ORB-SLAM2等流行算法可能无法稳定运行的困难。
关注下方《学姐带你玩AI》🚀🚀🚀
回复“SLAM改”获取全部论文+开源代码
码字不易,欢迎大家点赞评论收藏















 742
742











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









