









提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
目录
前言
云台在智能安防、自动攻击火炮以及人机交互领域扮演者重要的角色,例如将视觉系统和火炮攻击系统整合于多自由度云台上,利用计算机视觉技术进行敌对目标快速锁定,以实现对目标的跟踪和打击。
目前,经典控制理论的PID控制,在系统的控制精度、抗干扰和多目标控制性能的需求下已经显得乏力。本课程作业从二自由度的云台的控制角度出发,结合现代控制理论技术,进行基于LQR输出反馈控制器的设计,以满足云台控制系统在快速性、稳定性和鲁棒性上的需求。
一、系统概述
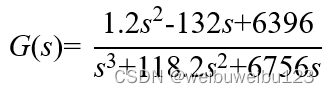
1.系统建模(直接使用作者系统辨识后得到的云台模型的传递函数) 由系统辨识和高阶系统降阶方法得到云台模型的传递函数:
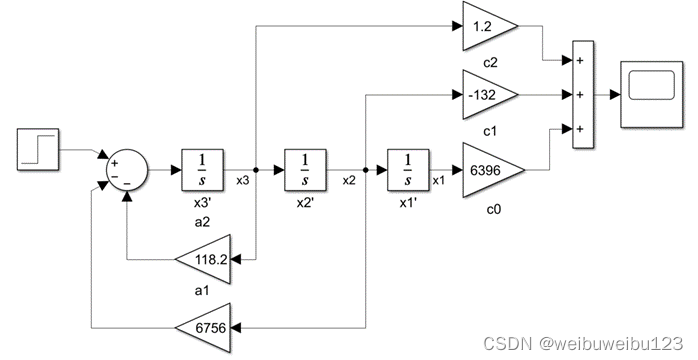
由simulink绘制系统的开环模拟结构图,所述的结构图如图所示
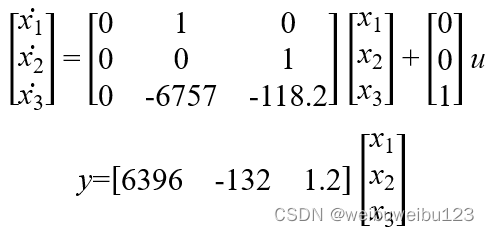
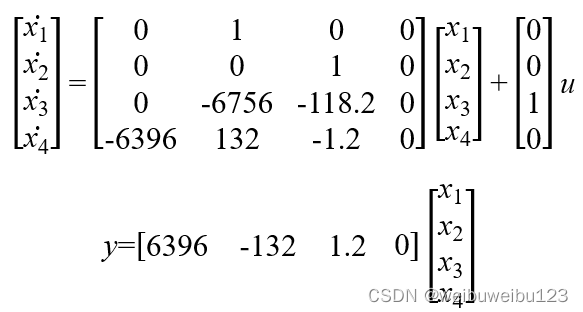
对应的状态方程空间表达式:
云台模型的开环Bode图,以及单位闭环的单位阶跃响应如图所示:
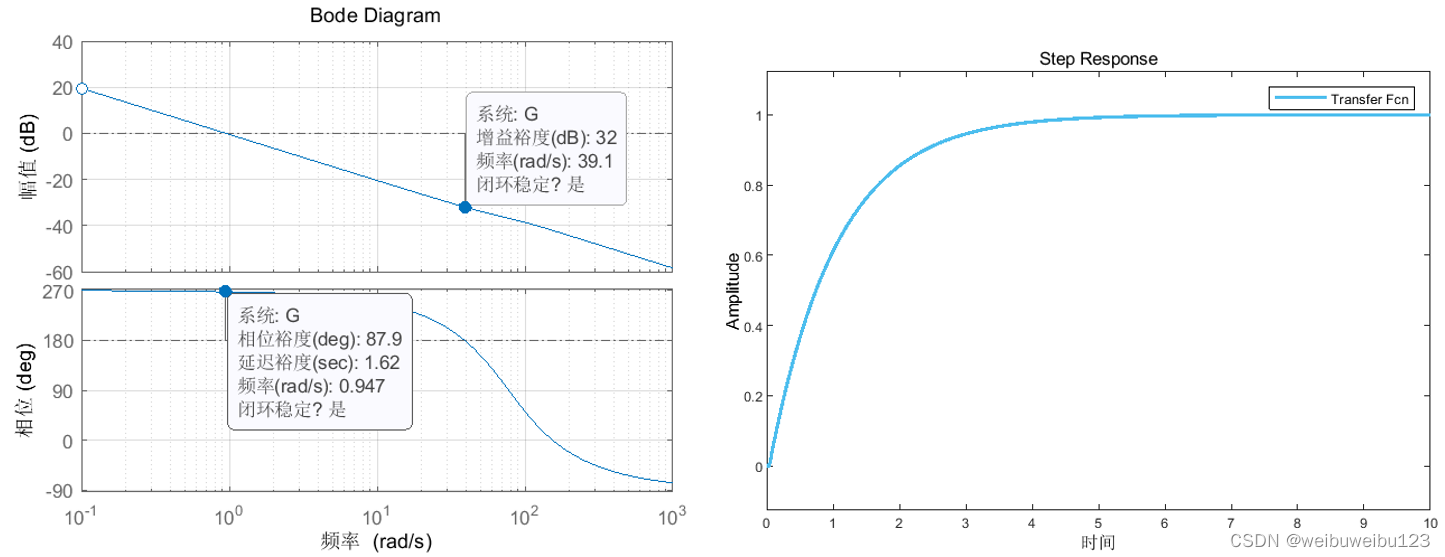
开环系统Bode图与闭环系统单位阶跃响应
由上图可知,云台系统的调节时间约为3.9s,截止频率为0.947rad/s,幅值裕度为32dB,系统具有一定的幅值裕度,但是系统的响应速度慢,不满足实际的应用需求,原系统的快速性有待提高,故而设计的控制器应该保证系统在有一定的稳定裕度的情形下,提升系统的响应速度。
二、LQR控制器设计与仿真
1.LQR基本原理
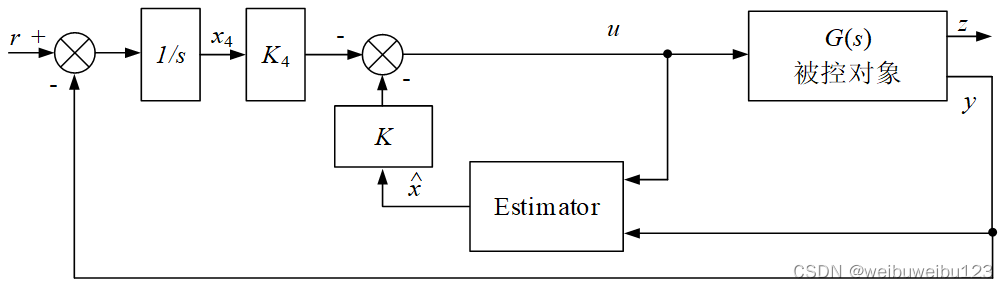
标准的LQR控制系统的设计如图所示:
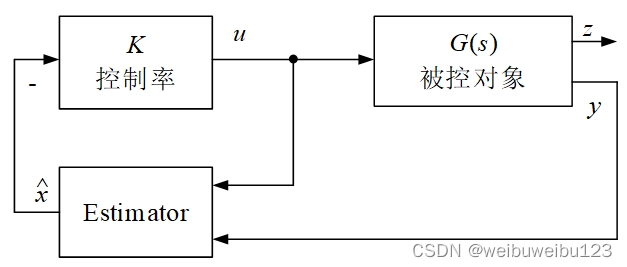
标准的LQR控制系统结构图
其中G(s)为被控对象,K为状态反馈矩阵, ![]() 为通过状态估计得到估计状态,u为被控对象控制信号,z表示控制器的控制输出,y为能够测量得到的输出信号。LQR 控制率为:
为通过状态估计得到估计状态,u为被控对象控制信号,z表示控制器的控制输出,y为能够测量得到的输出信号。LQR 控制率为:![]() ,其主要目标是寻求合适的控制信号u, t ∈(0,∞) 使得所示目标函数最小。
,其主要目标是寻求合适的控制信号u, t ∈(0,∞) 使得所示目标函数最小。
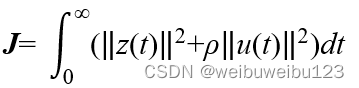
可进一步改写为:
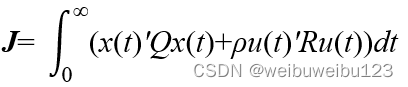
上述指标函数中,Q为半正定权矩阵,R为正的权系数。控制输出z一般可根据实际系统的控制要求来选定,不同的控制输出z 对应不同的控制方案,且当控制输出z确定后,相应的矩阵Q和R的值也确定下来。
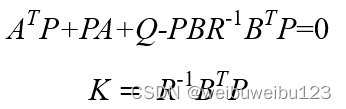
确定权矩阵Q和权系数R后,求解Riccati方程即可得到最优状态反馈矩阵K,Riccatic方程得到的状态反馈矩阵
通常情况下,在设计 LQR 控制器时只考虑零输入时的情况。在云台控制系统中,可考虑加入一个比例积分环节,以便于控制系统实现零误差跟踪。加内模控制的LQR状态反馈控制器的闭环结构框图如图,K4为内模状态控制系数, 为云台实时输出的角度值。
LQR状态反馈控制器的闭环结构框图
2.LQR控制器设计
LQR 控制器设计,需要得到系统的所有状态值,但在实际系统中,只能通过绝对值编码器测量角度信号,而系统为三阶模型有三个状态变量,因此必须设计状态观测器。线性系统理论指出,基于 LQR 输出反馈控制设计包含状态反馈设计和状态观测器设计,而两者又是相互独立的,故可以分开独立设计。
1)状态反馈设计
在本次设计采用内模加状态反馈的方法设计控制器,内模状态为x4 ,控制率为u(t) = −Kx(t) 。加内模后系统的simulink模拟结构图如图所示。加入内模状态后的系统状态空间表达式如式所示:
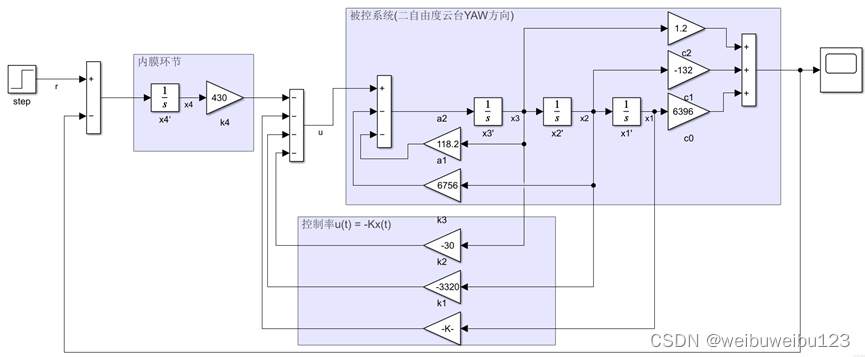
加入内膜控制和LQR控制的系统结构图
令
选择
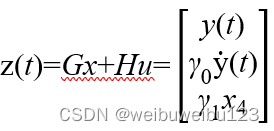
这样就可以让被测输出 y(t) 和它的导数 y(t)![]() 都很小,同时内模积分器的输出也得到了限幅。让系统的稳态性能和动态性能都得到保证。则
都很小,同时内模积分器的输出也得到了限幅。让系统的稳态性能和动态性能都得到保证。则

考虑目标函数J,则有:
![]()
求解Riccati方程即可得到最优状态反馈矩阵K,得到的状态反馈矩阵。
所设计的状态反馈控制器中,其中三个参数(γ0,γ1,ρ )为系统的控制权系数,选取不同的控制权重系数后,再求解对应的黎卡提方程就可以得到对应的状态反馈矩阵K,闭环极点P。下面是关于LQR三个控制权重系数分析:
a.要使代价函数较小,而又不使控制作用减弱,参数ρ应越小越好;
b. γ0 表征系统状态速度![]() ,期望系统的状态速度越快越好,应该越小越好;
,期望系统的状态速度越快越好,应该越小越好;
c. γ1 与表征系统的累积误差e有关,系统的累积误差越小越好,故越大越好。
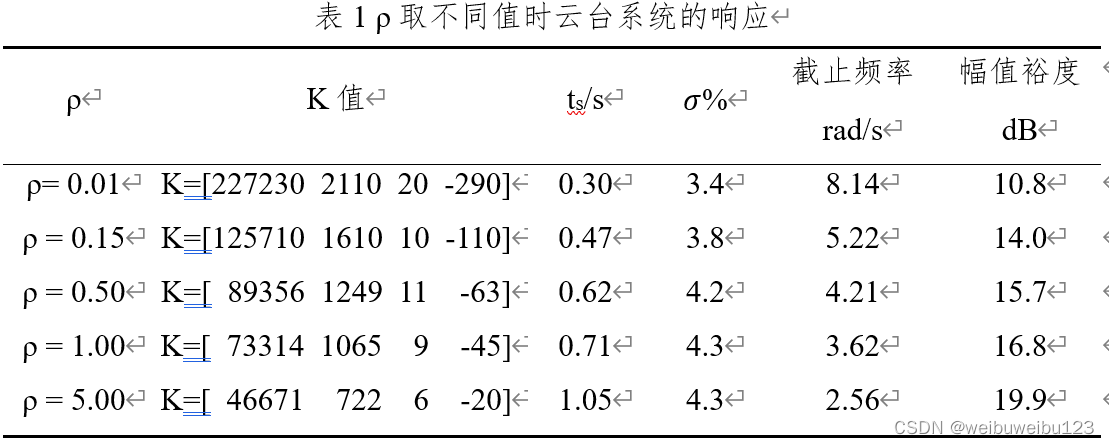
分析参数ρ的影响:
选取参数γ0 = 0.1,参数γ1=45,参数ρ取不同值,得到系统的开环频率特性以及闭环单位阶跃响应结果。
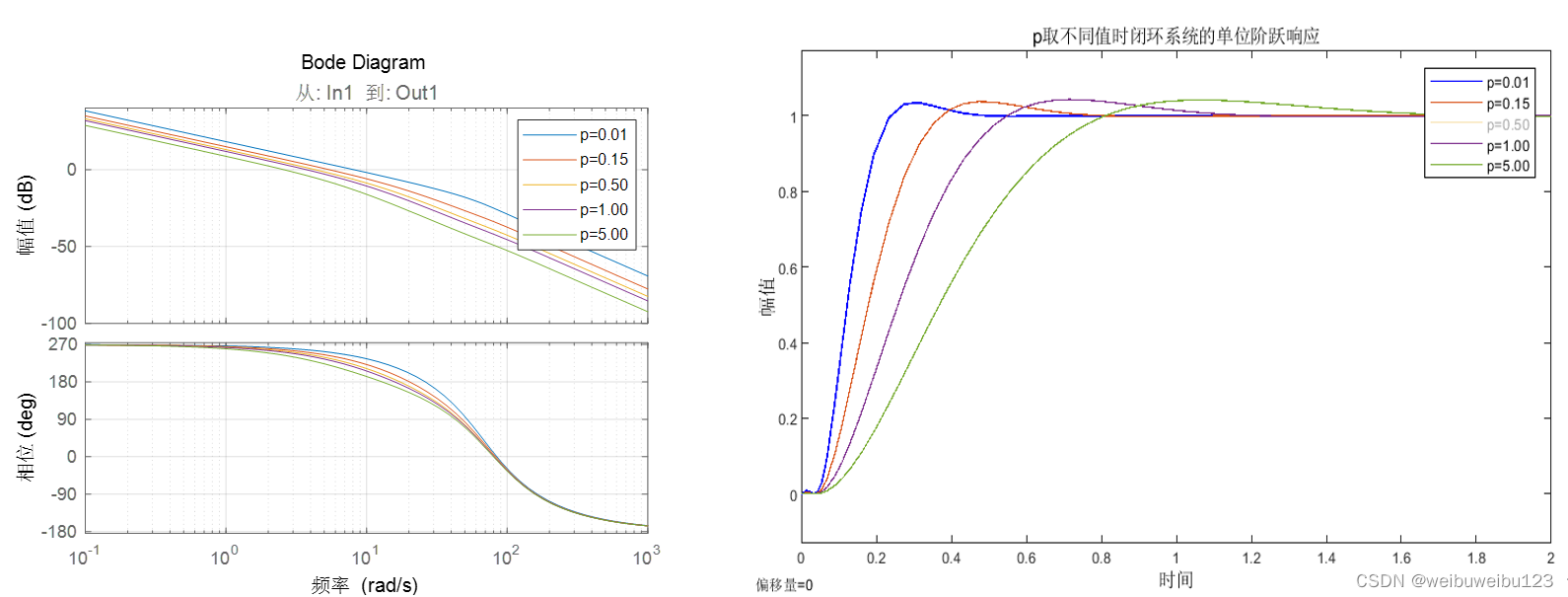
ρ取不同值时云台系统的Bode图和闭环单位阶跃响应
分析:固定权重系数γ0 , γ1 不变时,增大权重系数ρ,系统的调节时间增大,截止频率也随之减小,说明系统的响应速度减慢了;而系统的超调量变化不大,幅值裕度随着权重系数的增大也相应的增大,即系统的稳定性增强。这些变化规律表明权重因子ρ牺牲系统的动态响应速度,获得一定的稳定裕度,因此在设计状态反馈时,权重系数ρ应该尽量取小值。
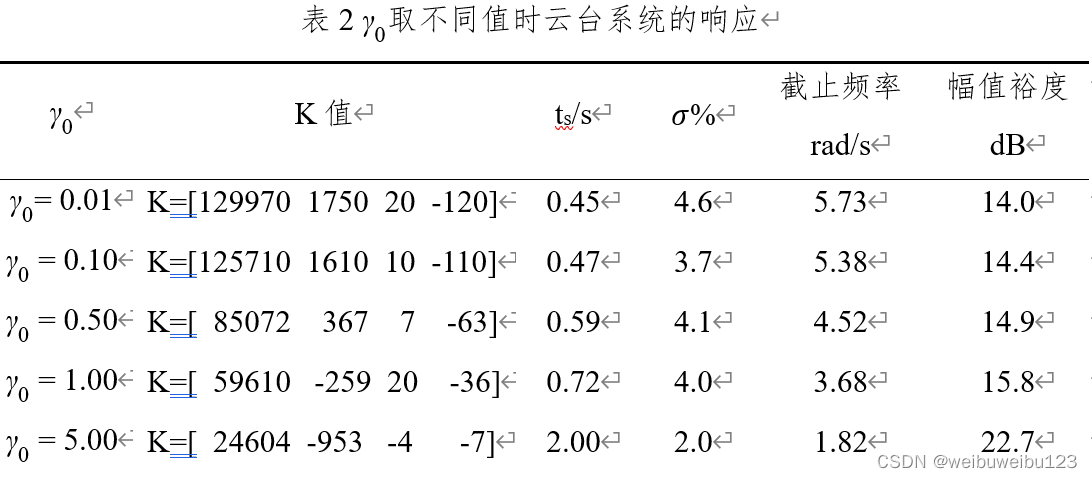
分析参数γ0 的影响:
选取参数ρ= 0.15,参数γ1=45,参数γ0取不同值,得到系统的开环频率特性以及闭环单位阶跃响应结果。
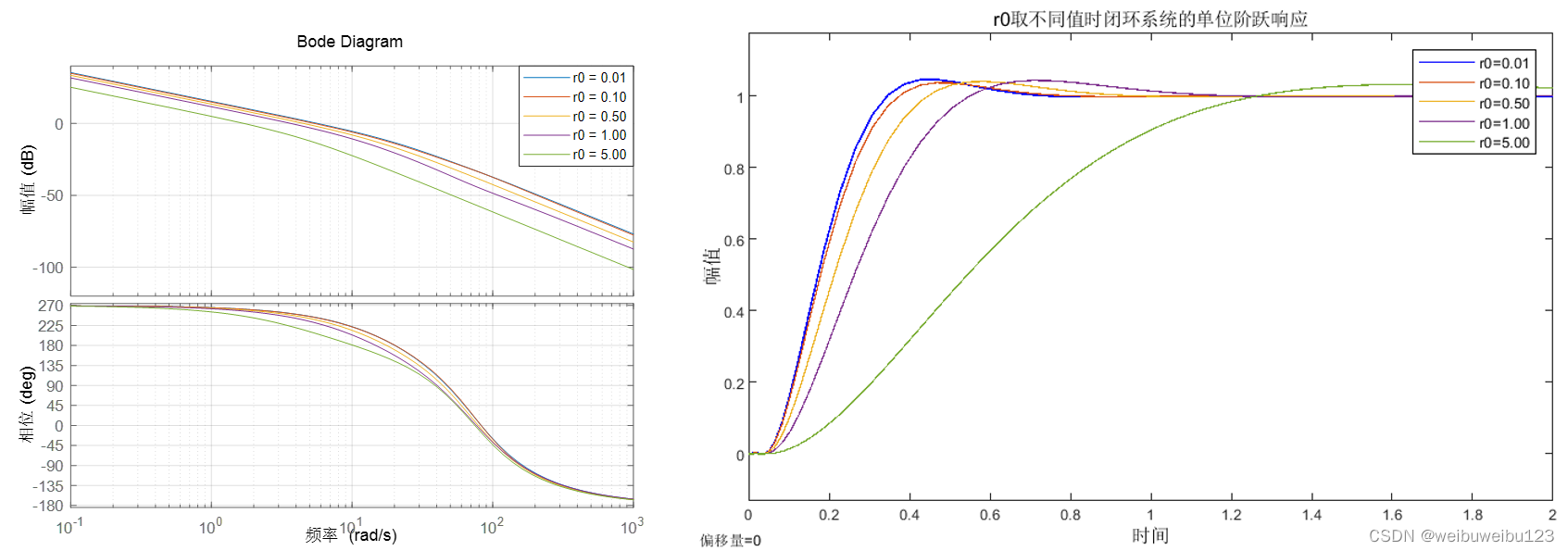
γ0取不同值时云台系统的Bode图和闭环单位阶跃响应
分析:增大权重系数γ0 ,系统的调节时间增大,截止频率也随之减小,说明系统的响应速度减慢了;而系统的超调量变化不大,幅值裕度随着权重系数的增大也相应的增大,即系统的稳定性增强。这表明权重因子γ0 牺牲系统的动态响应速度,获得一定的稳定裕度,因此在设计状态反馈时,权重系数γ0 应该尽量取小值。
分析参数γ1 的影响:
选取参数ρ= 0.15,参数γ0=0.1,参数γ1 取不同值,得到系统的开环频率特性以及闭环单位阶跃响应结果。
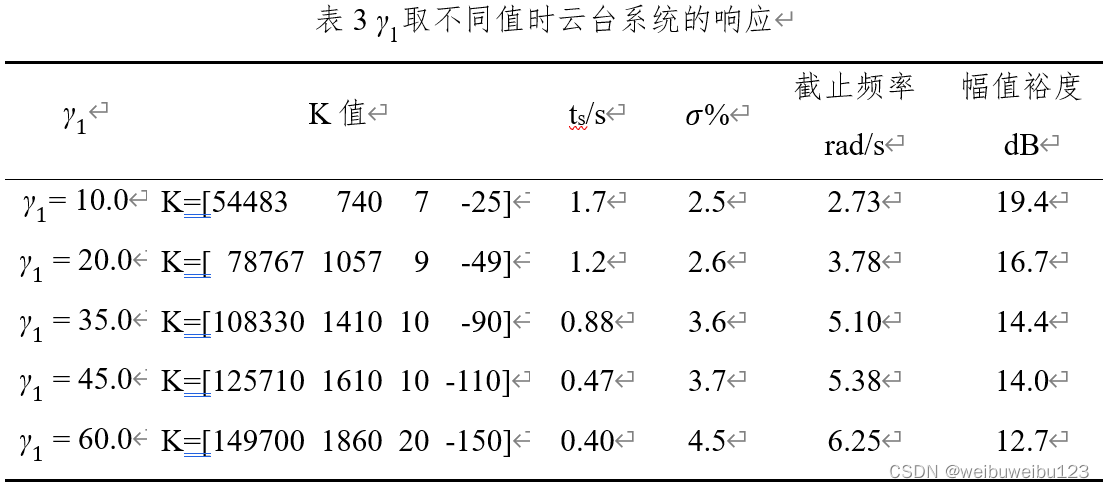
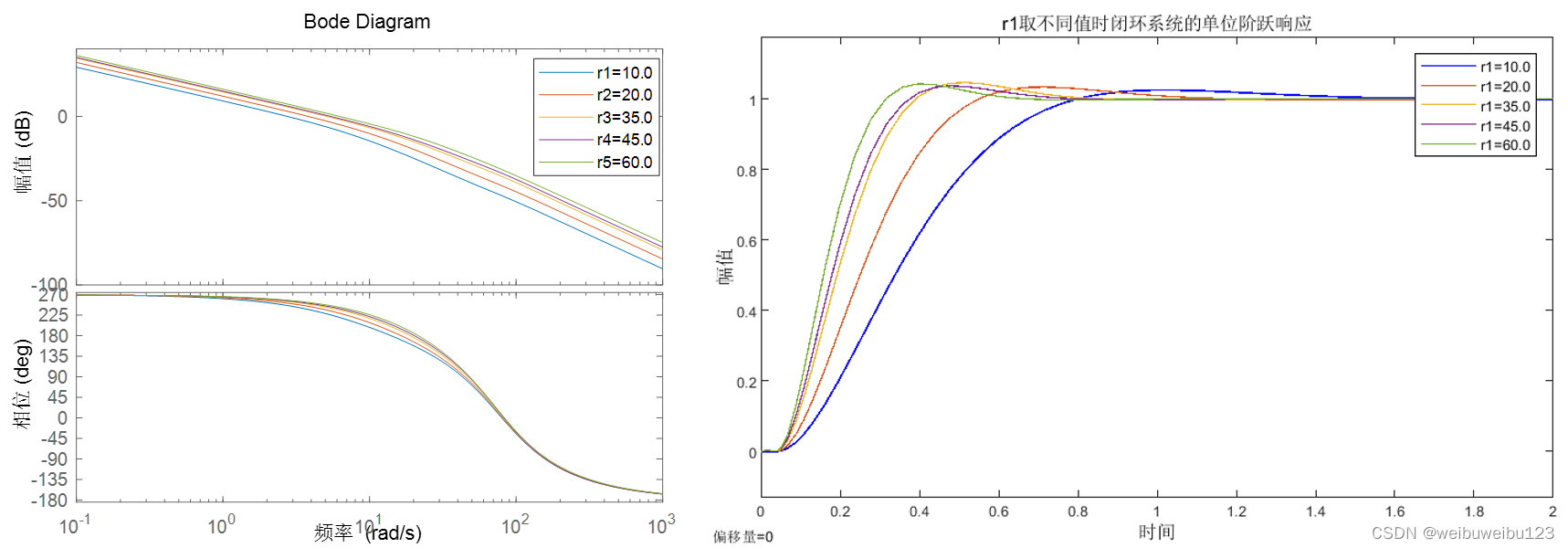
γ1 取不同值时云台系统的Bode图和闭环单位阶跃响应
分析:增大权重系数γ1,系统的调节时间显著减小,截止频率也随之明显增大,说明系统的响应速度加快了;而系统的超调量变化不大,幅值裕度随着权重系数的增大而减小,即系统的稳定性降低。这表明权重因子γ1 牺牲系统的稳定裕度,以降低系统稳定性为代价来换取加快系统响应速度的目的。因此在设计状态反馈时,权重系数γ1 应该尽量取大点。
综上,可以拟定选择参数γ0 = 0.015,γ1 = 65,ρ = 0.01。
3. 状态观测器设计
云台只有角度信息可以通过编码器进行测量,其他状态值都不可测,而设计状态反馈控制器需要知道每个状态的反馈值,因此需要设计状态观测器,用观测器估计出来的系统状态去替代实际系统的状态。
判断系统的能观性:
构造系统的能观性矩阵:
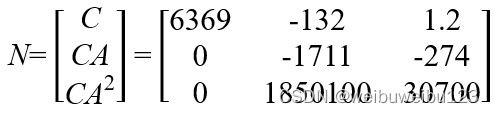
能观判别矩阵N的秩Rank(N) = 3,系统完全能观,可以构造全维状态观测器,则得到整个控制系统的Simulink结构图如图所示。
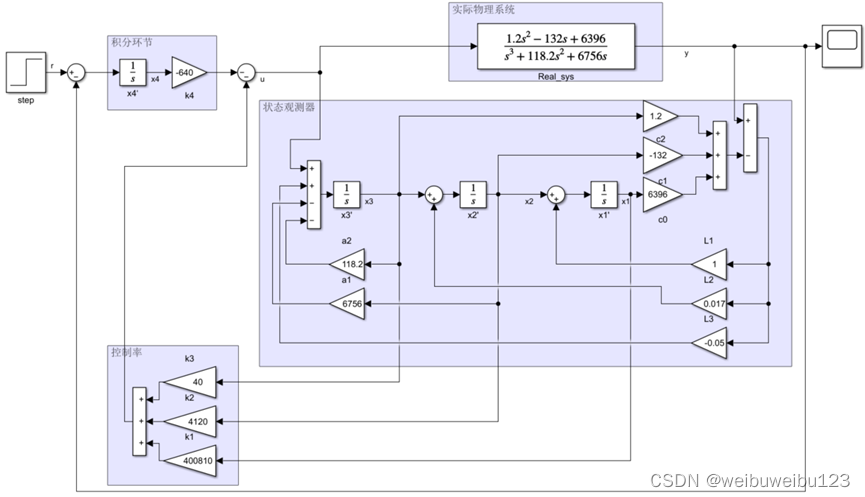
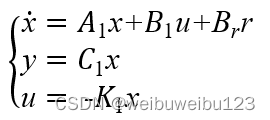
根据输出反馈控制结构框图可以容易写出观测器的状态方程如公式
![]()
记观测误差![]() ,
, ![]() 则有:
则有:
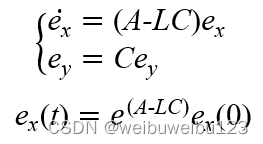
要使观测误差![]() 渐进收敛为 0,则需要矩阵 ( A −LC) 的特征根均具由负实部。观测器的极点即为矩阵(A−LC)的全部特征根,当观测器的极点负实部离虚轴越远,则观测误差收敛速度越快,这样设计的观测器效果越好,当观测器的极点的负实部靠近虚轴或有正实部的极点时,误差收敛速度几乎没有变化或出现发散的情况,甚至于导致系统不稳定,因而必须选取合适的观测器极点。确定极点后便可以设计出状态观测矩阵 L。
渐进收敛为 0,则需要矩阵 ( A −LC) 的特征根均具由负实部。观测器的极点即为矩阵(A−LC)的全部特征根,当观测器的极点负实部离虚轴越远,则观测误差收敛速度越快,这样设计的观测器效果越好,当观测器的极点的负实部靠近虚轴或有正实部的极点时,误差收敛速度几乎没有变化或出现发散的情况,甚至于导致系统不稳定,因而必须选取合适的观测器极点。确定极点后便可以设计出状态观测矩阵 L。
根据前面的状态反馈设计和状态观测设计,选取了合适的权重系数γ0 = 0.015,γ1 = 65,ρ = 0.01,解对应的方程得到状态反馈矩阵:
K = [400810 4120 40 -640]
因为观测器极点离虚轴越远,状态估计误差收敛的速度越快,故可以人为选取P1,2 = −59 ± 60 j, P3 = −60 作为观测器的极点,其对应的观测矩阵为
L = [1 0.017 -0.05]
三、仿真结果
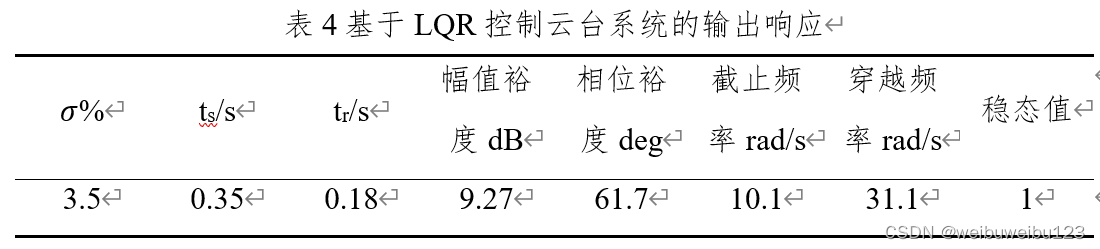
通过改变 LQR 的控制权重系数γ0 ,γ1 ,ρ便可以改变系统的控制性能。由上述的控制变化规律,选取控制权重系数γ0 = 0.015,γ1 = 65,ρ = 0.01,此时系统的闭环阶跃响应和开环伯德图如图 ,其闭环阶跃响应的时域各项性能指标以及开环频域指标如表 。
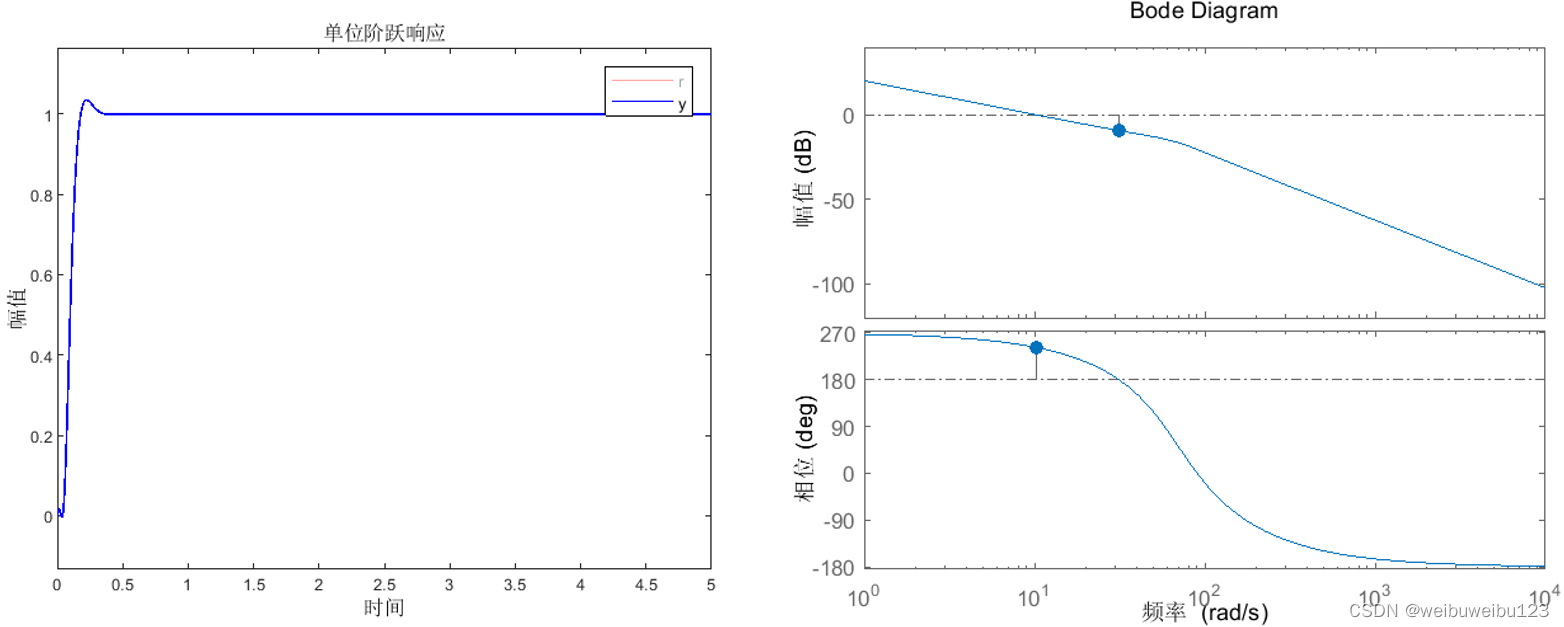
引入状态观测器云台系统的闭环单位阶跃响应和Bode图
附录 求解反馈增益矩阵K的matlab程序
%权重因子
r0 = 0.1;r1 = 60;p = 0.15;
%权重因子变换对反馈矩阵的影响
%r0 = 0.1;r1 = 45;p = 0.01; K = 1.0e+05 *[2.2723 0.0211 0.0002 -0.0029]
%r0 = 0.1;r1 = 45;p = 0.15; K = 1.0e+05 *[1.2571 0.0161 0.0001 -0.0011]
%r0 = 0.1;r1 = 45;p = 0.50; K = 1.0e+04 *[8.9356 0.1249 0.0011 -0.0063]
%r0 = 0.1;r1 = 45;p = 1.00; K = 1.0e+04 *[7.3314 0.1065 0.0009 -0.0045]
%r0 = 0.1;r1 = 45;p = 5.00; K = 1.0e+04 *[4.6671 0.0722 0.0006 -0.0020]
%r0变化
%r0 = 0.01;r1 = 45;p = 0.15; K = 1.0e+05 *[1.2997 0.0175 0.0002 -0.0012]
%r0 = 0.10;r1 = 45;p = 0.15; K = 1.0e+05 *[1.2571 0.0161 0.0001 -0.0011]
%r0 = 0.50;r1 = 45;p = 0.15; K = 1.0e+04 *[8.5072 0.0367 0.0007 -0.0063]
%r0 = 1.00;r1 = 45;p = 0.15; K = 1.0e+04 *[5.9610 -0.0259 0.0002 -0.0036]
%r0 = 5.00;r1 = 45;p = 0.15; K = 1.0e+04 *[2.4604 -0.0953 -0.0004 -0.0007]
%r1变化
%r0 = 0.10;r1 = 10;p = 0.15; K = 1.0e+04 *[5.4483 0.0740 0.0007 -0.0025]
%r0 = 0.10;r1 = 20;p = 0.15; K = 1.0e+04 *[7.8767 0.1057 0.0009 -0.0049]
%r0 = 0.10;r1 = 35;p = 0.15; K = 1.0e+05 *[1.0833 0.0141 0.0001 -0.0009]
%r0 = 0.10;r1 = 45;p = 0.15; K = 1.0e+05 *[1.2571 0.0161 0.0001 -0.0011]
%r0 = 0.10;r1 = 60;p = 0.15; K = 1.0e+05 *[1.4970 0.0186 0.0002 -0.0015]
%系统状态矩阵
A = [0, 1,0,0;
0,0,1,0;
0,-6756,-118.2,0;
-6396,132,-1.2,0];
B = [0;0;1;0];
C = [6396,-132,1.2,0];
%计算目标函数J的相关系数
G = [C;r0*C*A;0,0,0,r1];
H = [0;r0*C*B;0];
I = 1;
Q = G'*G;
R = H'*H+p*I;
N = G'*H;
%求解Riccati方程,得到反馈增益矩阵
[K,S,E] = lqr(A,B,Q,R,N)
总结
提示:这里对文章进行总结:
例如:以上就是今天要讲的内容,本文仅仅简单介绍了LQR的使用。
参考文献:
[1]阳春分.二自由度云台视觉伺服系统研究与应用[D].华南理工大学,2017.
[2]王鹏飞. 二自由度云台视觉伺服控制系统的设计与实现[D].南京理工大学,2020.
作者:weibuweibu123

















 1116
1116

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









