







概述
accepted:Arxiv
项目主页
文章解读参考:
论文解读
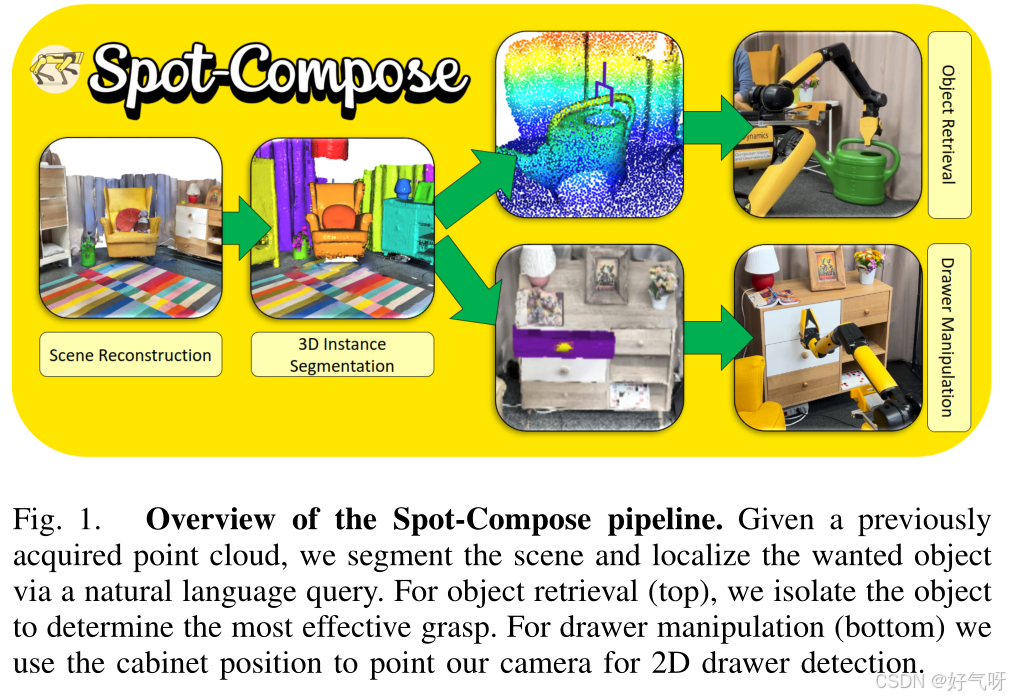
方法架构
a comprehensive framework for robotic interaction and manipulation
3D reconstructions from a commodity 3D scanner for open-vocabulary instance segmentation, alongside grasp pose estimation
- 三维数据的获取:iPhone 13 Pro Max using the 3D Scanner App [39]
- Open-vocabulary 3D Instance Segmentation开放词汇3D实例分割:OpenMask3D [11]
- 自适应抓取:AnyGrasp system [31]
- Adaptive navigation and joint optimization
- Dynamic drawer detection and motion estimation:三个部分drawer and handle detection, estimation of the axis of motion, and actual grasp plan
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 51
51

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









