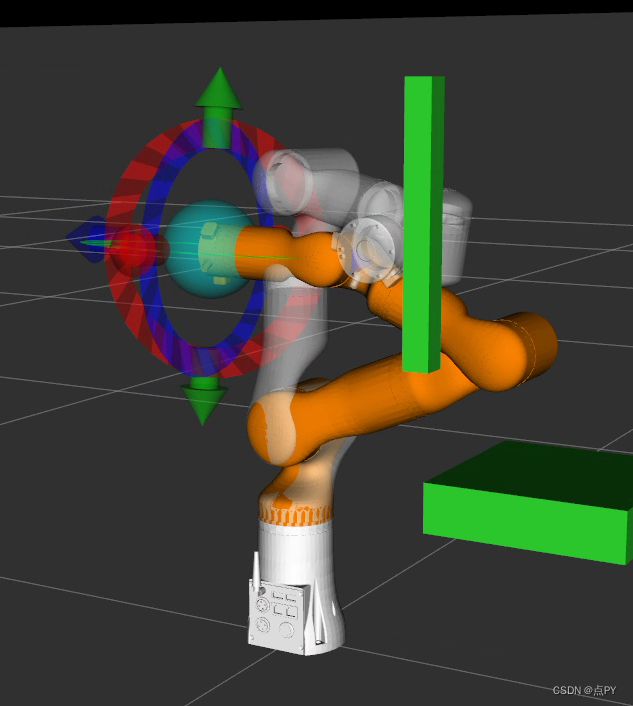
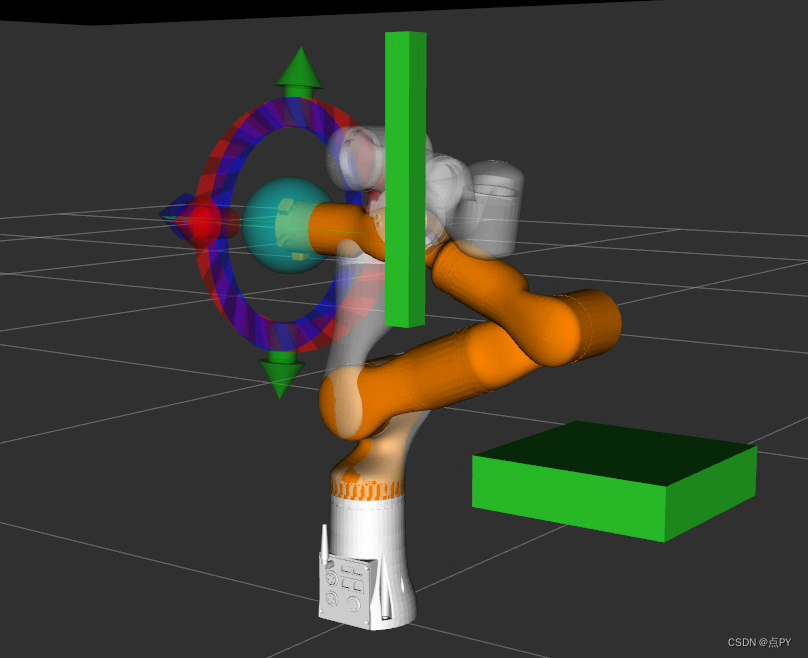
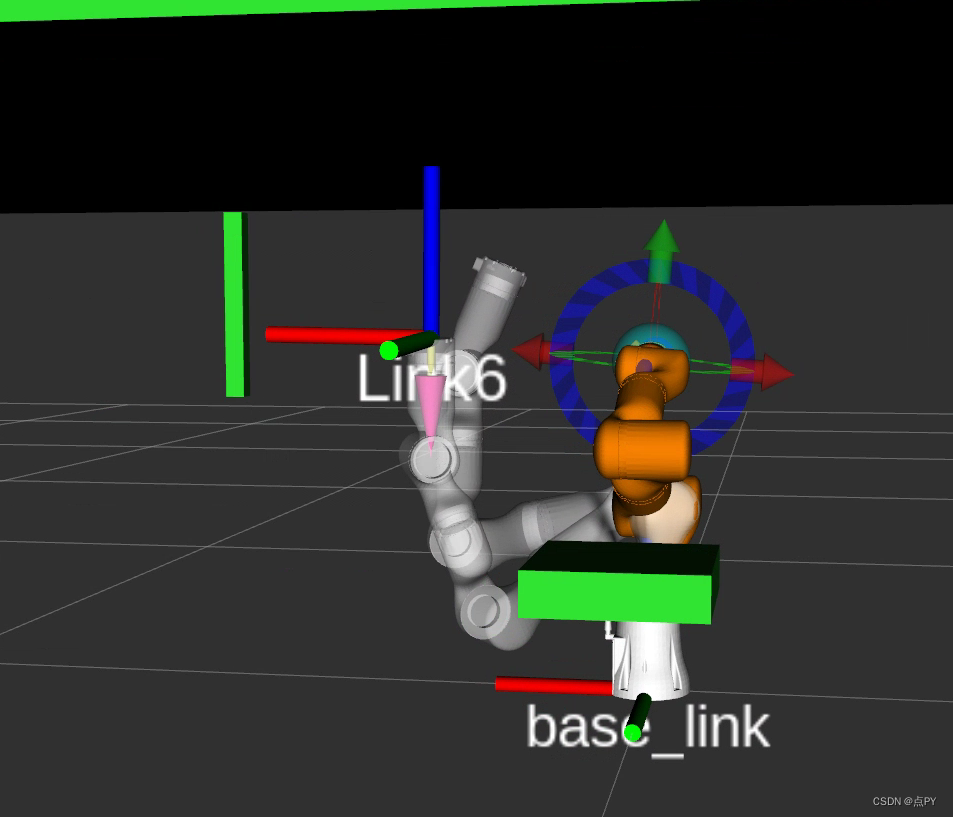
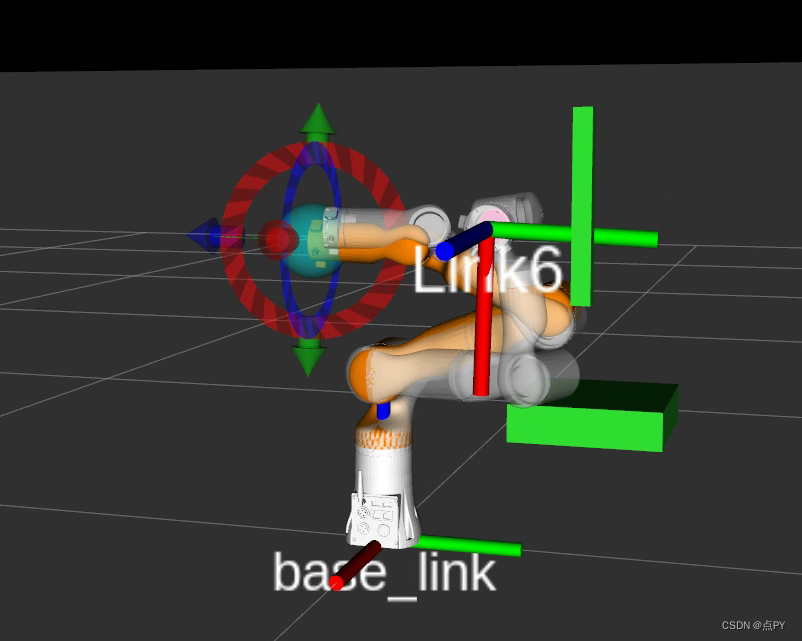
存在的问题 机械臂运动到预采摘位置时,末端朝向与目标物体不一致。 解决方法 RPY全部设置为0。从下图可以看出,Link6和base_link是简单的平移关系,无需旋转。 roll=0, pitch=1.57, yaw=0.0,末端水平放置。 在水平面上与目标物体对齐,计算目标物体在base_link下与x轴的夹角(弧度),然后转成四元数,赋值给末端的pose。








 超级会员免费看
超级会员免费看

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 777
777

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








