







 超级会员免费看
超级会员免费看
文章目录
人机交互
感知
基于目标检测
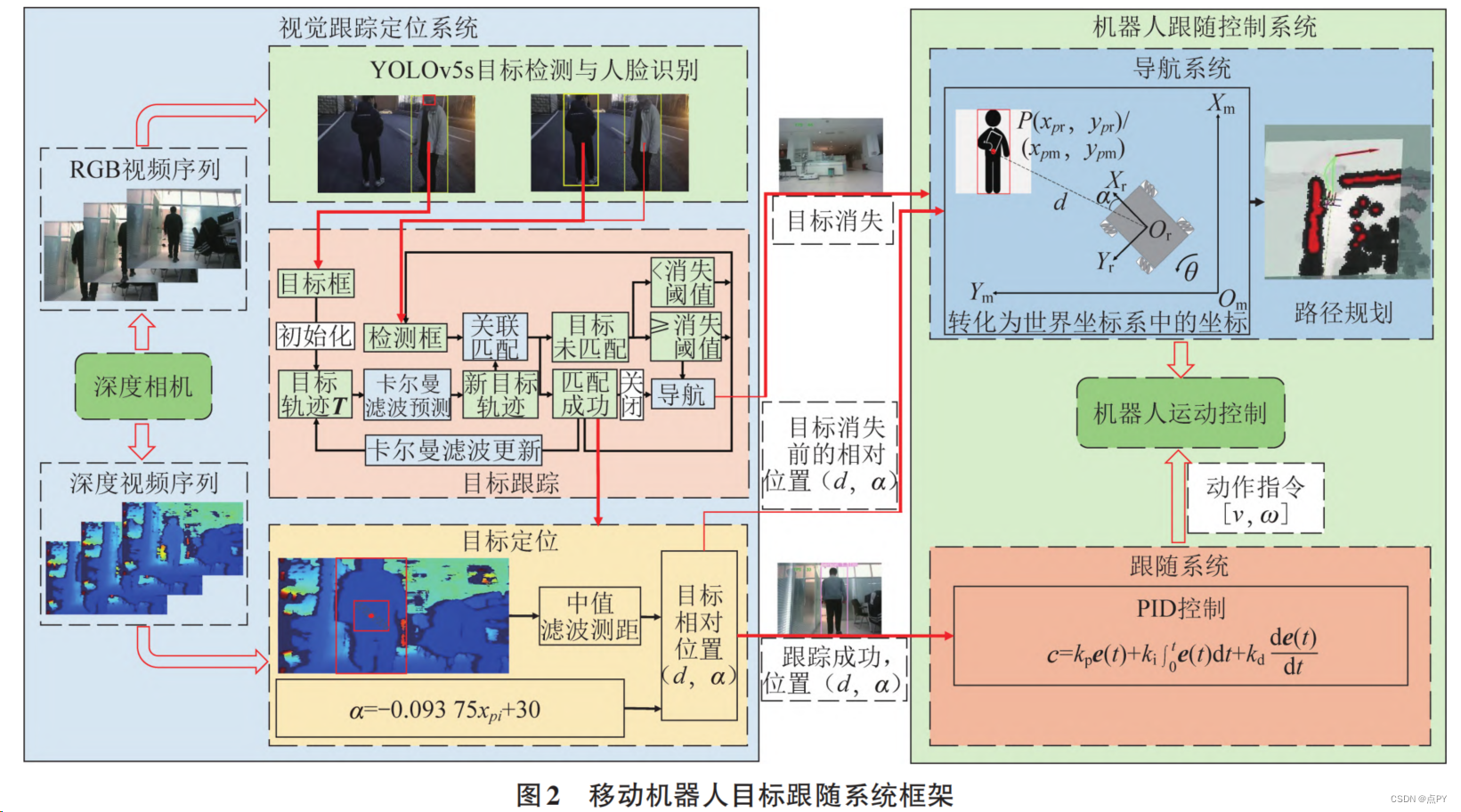
基于视觉跟踪与自主导航的移动机器人目标跟随系统[J]
针对在移动机器人跟随目标的过程中目标消失的情景,提出了基于视觉跟踪与自主导航的机器人目标跟随系统。将机器人跟随问题分为目标在机器人视野内时的常规跟随和目标消失后的自主导航两种情况。对于常规跟随,通过卡尔曼滤波器预测目标运动状态,采用行人重识别网络提取外观特征,通过数据关联融合运动信息和外观特征后进行目标跟踪,再通过伺服控制进行跟随。对于自主导航,基于目标消失前与机器人的相对位置,采用自主导航算法,使机器人移动到目标消失位置附近进行搜索,来提高对目标的跟随成功率。将提出的算法在OTB100公开测试集和机器人应用场景下的跟随测试集中进行评估,并在移动机器人平台上进行实验,结果表明,机器人可以在不同照明条件、背景行人较多的环境中跟随目标,验证了所提算法的稳健性和有效性,同时可满足实时性要求。研究结果可为机器人在目标消失后再跟随问题的研究提供参考。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 6172
6172

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











