







1. 效果图
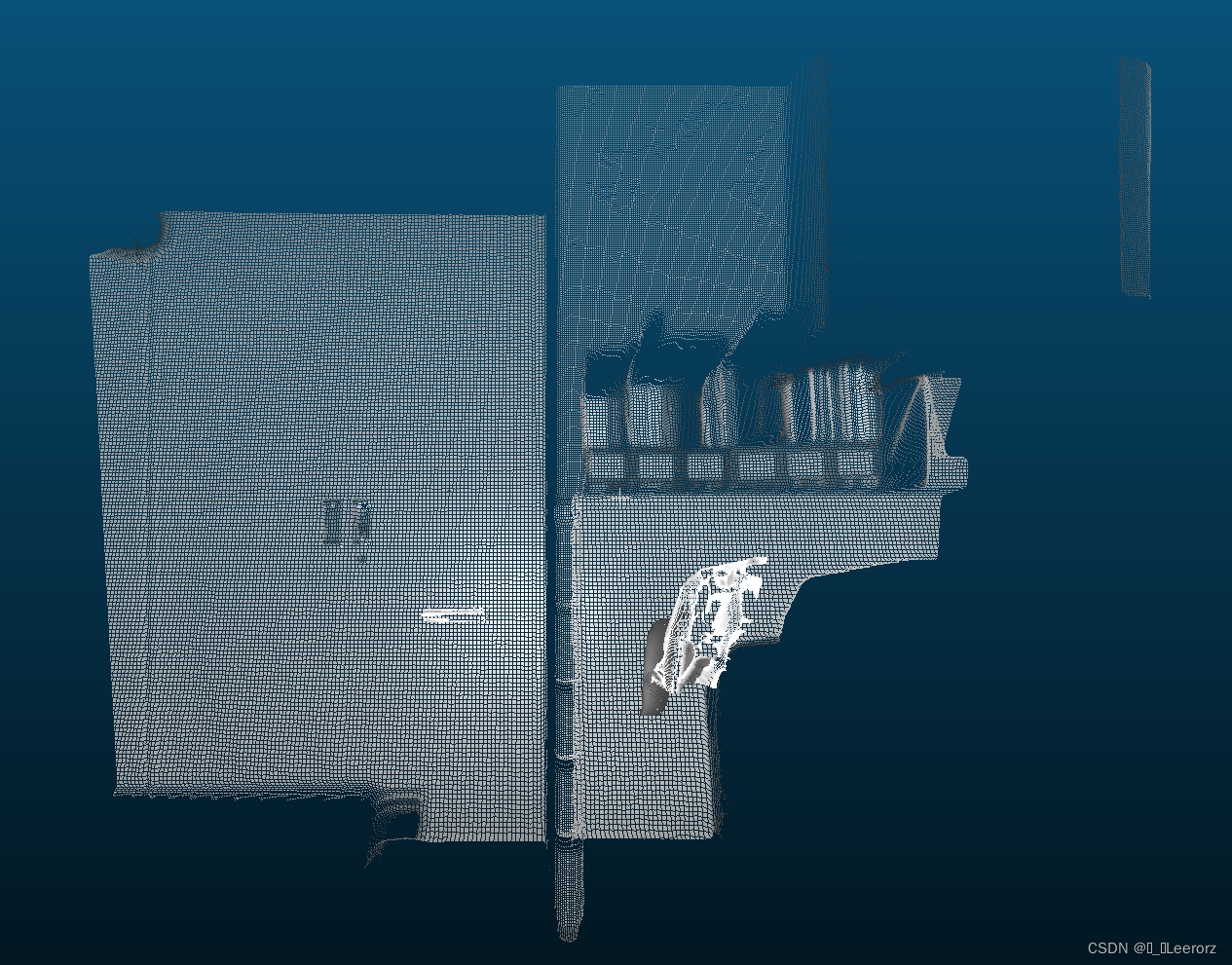
彩色深度图如下:

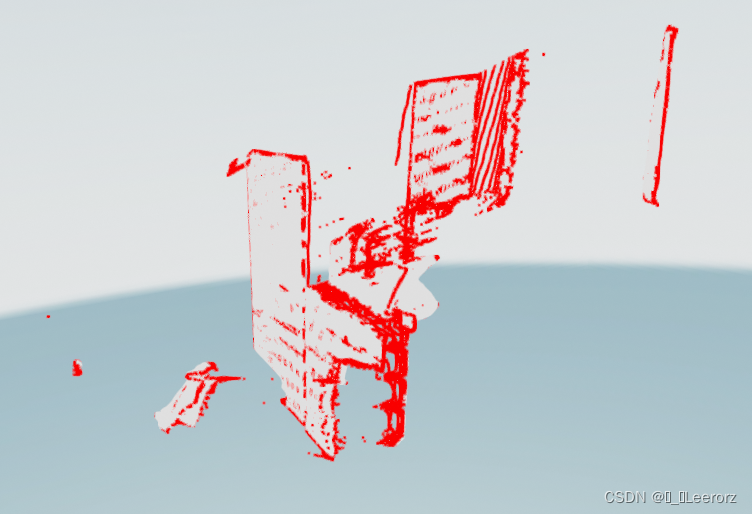
原始输入点云图如下:
红色是外点,灰色是内点,半径滤波效果如下
平面检测效果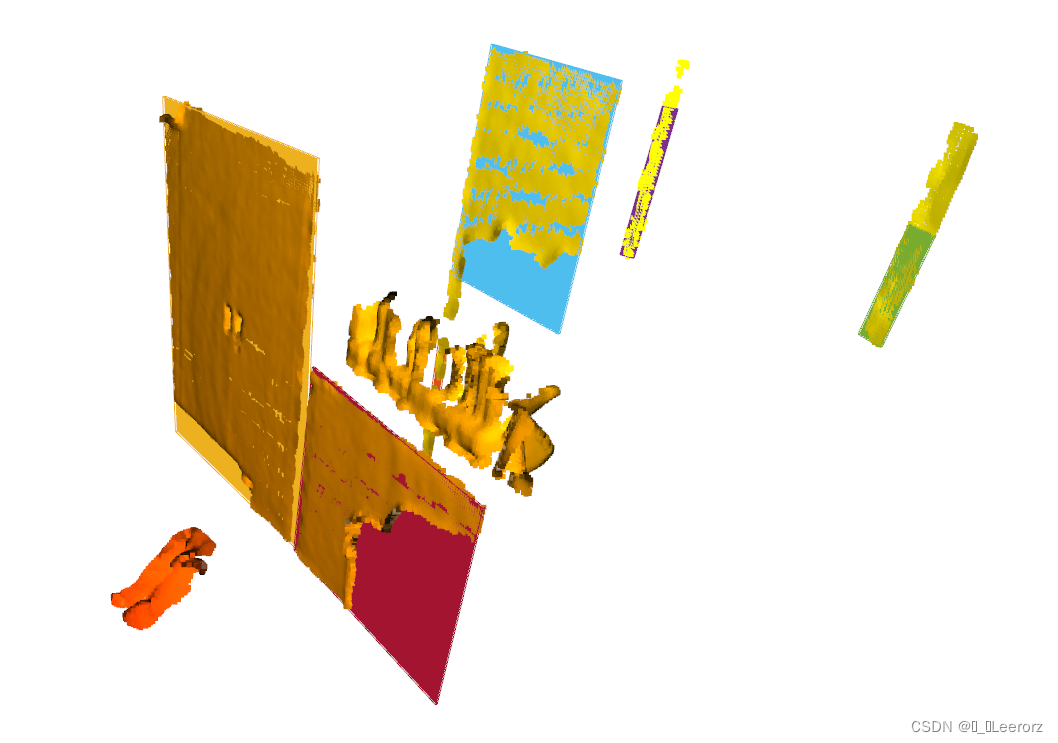
2 . 点云数据ply
https://download.csdn.net/download/weixin_43047324/88041981?spm=1001.2014.3001.5503
资源目前设置的5积分,如果没有积分,也可以私信我索取
3. 代码
import open3d as o3d
def display_inlier_outlier(cloud, ind):
inlier_cloud = cloud.select_by_index(ind)
outlier_cloud = cloud.select_by_index(ind, invert=True)
print("Showing outliers (red) and inliers (gra
 订阅专栏 解锁全文
订阅专栏 解锁全文
















 2443
2443











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











