







 本文介绍了基于滑模观测器(SMO)的永磁同步电机(PMSM)转速估计方法。通过α-β两相坐标系的电压方程,结合SMO设计来估算反电动势和转子角速度。文中提到了在实际应用中需要低通滤波器以减小开关函数的影响,并探讨了通过反正切函数和锁相环方法计算转速和转子角度。仿真结果显示转速跟踪存在抖振问题,提供了相关MATLAB仿真资源。
本文介绍了基于滑模观测器(SMO)的永磁同步电机(PMSM)转速估计方法。通过α-β两相坐标系的电压方程,结合SMO设计来估算反电动势和转子角速度。文中提到了在实际应用中需要低通滤波器以减小开关函数的影响,并探讨了通过反正切函数和锁相环方法计算转速和转子角度。仿真结果显示转速跟踪存在抖振问题,提供了相关MATLAB仿真资源。
(网上相关的内容质量高于本篇的有很多 本篇仅作抛砖引玉之用。发现了某乎上面有一篇更好的文章 这里贴上来:彻底吃透滑模观测器(PMSM无感算法)(理论精讲+推导+算法+调参+硬件运行) - 知乎 (zhihu.com))
1.理论介绍
滑模观测器的设计基于α-β静止两相坐标系下的模型,首先基于如下的电压方程:
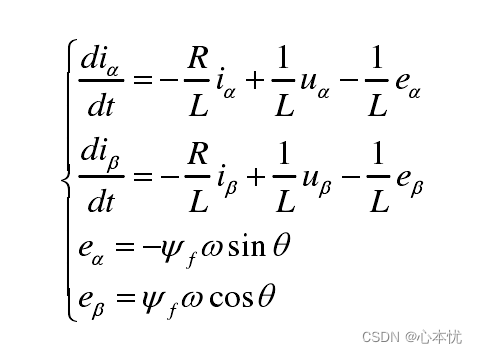
在仿真过程中 电压uα和uβ作为滑模观测器所观测系统的系统输入,电流量iα和iβ则是作为被观测的量,通过SMO来估计反电动势 最终得到电机转子角速度。构造的SMO公式如下:
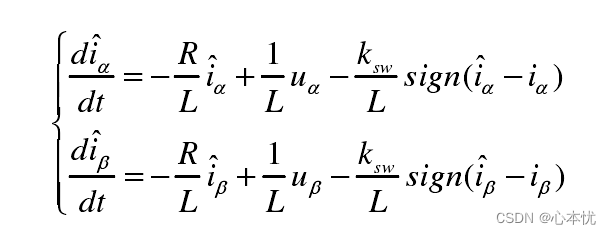
可以看到 反电动势项无法直接得到 因此电流的估计误差需要通过切换函数项sign来保证收敛,即
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 7672
7672











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











