




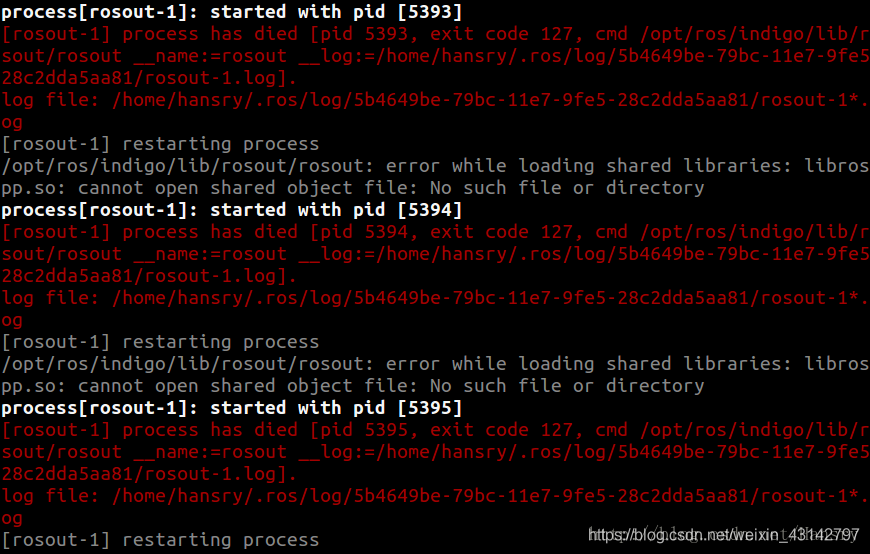
今天在车上准备运行节点使用ROS的时候,执行roscore,发现出现以下问题:
在home路径下打开.bashrc文件:
gedit ~/.bashrc
对于kinetic版本在最后面加入下列代码即可解决:
LD_LIBRARY_PATH=/opt/ros/kinetic/lib
对于indigo版本加入下列版本:
LD_LIBRARY_PATH=/opt/ros/indigo/lib
最后再
source ~/.bashrc
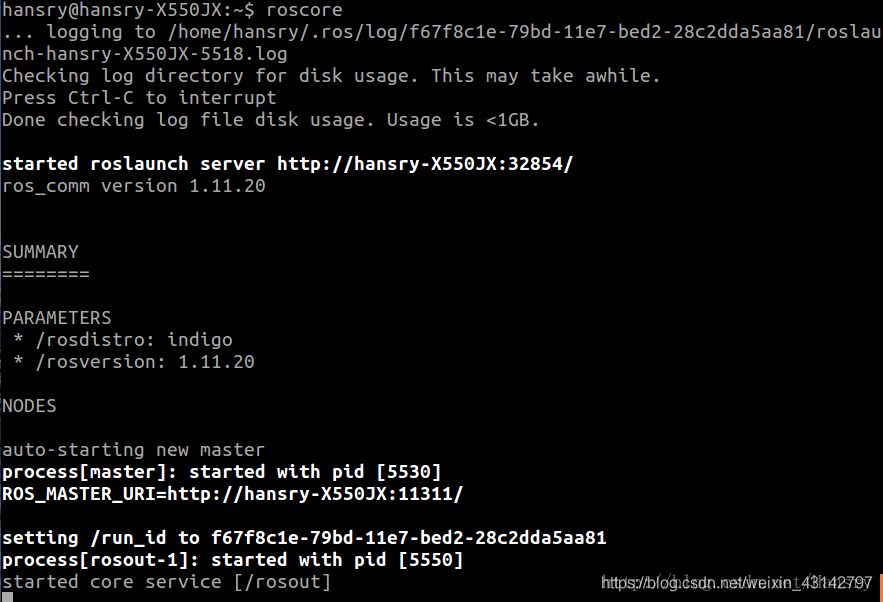
再重新运行roscore就正常了.
 本文解决在使用ROS过程中遇到的roscore运行错误问题,通过编辑.bashrc文件并添加特定版本的LD_LIBRARY_PATH环境变量,成功解决了Kinetic和Indigo版本的运行问题。
本文解决在使用ROS过程中遇到的roscore运行错误问题,通过编辑.bashrc文件并添加特定版本的LD_LIBRARY_PATH环境变量,成功解决了Kinetic和Indigo版本的运行问题。
今天在车上准备运行节点使用ROS的时候,执行roscore,发现出现以下问题:
在home路径下打开.bashrc文件:
gedit ~/.bashrc
对于kinetic版本在最后面加入下列代码即可解决:
LD_LIBRARY_PATH=/opt/ros/kinetic/lib
对于indigo版本加入下列版本:
LD_LIBRARY_PATH=/opt/ros/indigo/lib
最后再
source ~/.bashrc
再重新运行roscore就正常了.
 4115
1092
6915
4039
4115
1092
6915
4039

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























