







 本文档详细介绍了如何在Windows环境下下载并安装Robostudio,连接激光雷达,下载SDK,安装驱动,以及通过Robostudio手动连接和启动雷达的过程。步骤包括从官方网站获取软件和驱动,识别雷达端口,并成功使能雷达扫描功能。
本文档详细介绍了如何在Windows环境下下载并安装Robostudio,连接激光雷达,下载SDK,安装驱动,以及通过Robostudio手动连接和启动雷达的过程。步骤包括从官方网站获取软件和驱动,识别雷达端口,并成功使能雷达扫描功能。
1.去官网下载Robostudio,我这里是windows
http://www.slamtec.com/robostudio

2.连接激光雷达


3.去官网下载SDK

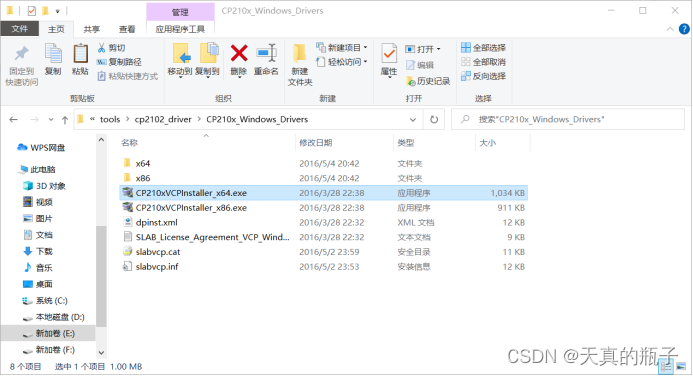
4.在SDK文件夹里的tools里面找驱动下载驱动
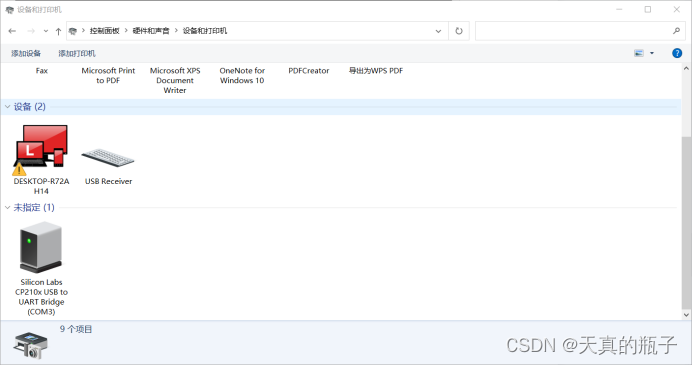
5.电脑成功识别端口(我这里是com3)
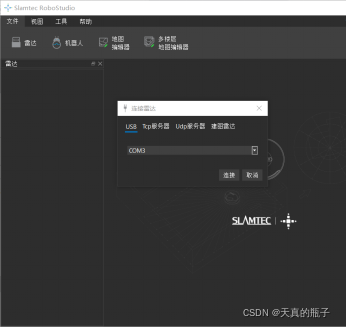
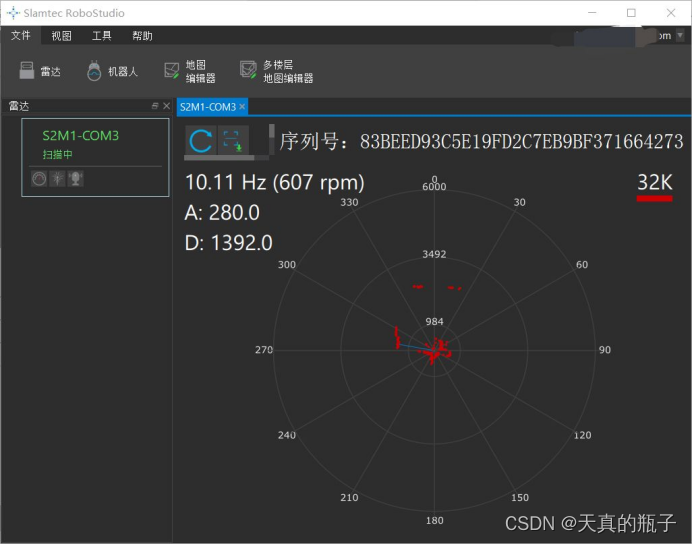
6.启动Robostudio,点击雷达,右键选择手动连接,然后选com3端口,此使可以成功识别到雷达,转接器指示灯亮(绿色)

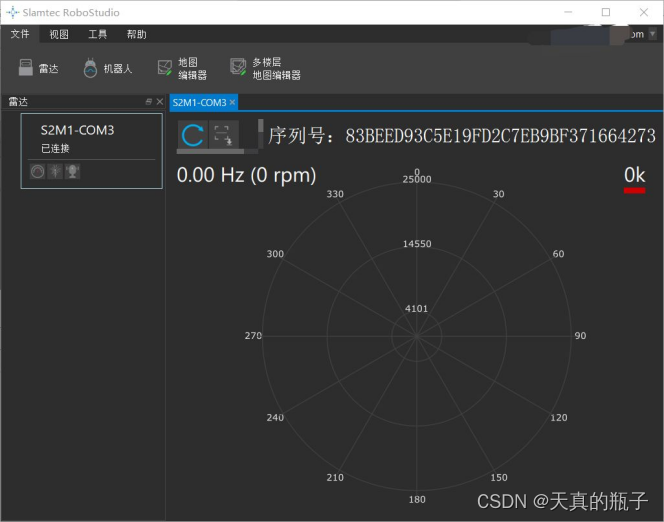
7.在S2M1-COM3上右键-扫描,启动雷达
1.去官网下载Robostudio,我这里是windows
http://www.slamtec.com/robostudio
2.连接激光雷达
3.去官网下载SDK
4.在SDK文件夹里的tools里面找驱动下载驱动
5.电脑成功识别端口(我这里是com3)
6.启动Robostudio,点击雷达,右键选择手动连接,然后选com3端口,此使可以成功识别到雷达,转接器指示灯亮(绿色)
7.在S2M1-COM3上右键-扫描,启动雷达
 2676
2676

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























