







参考下面这篇博客,这里仅做记录,如有侵权,请联系删除
https://blog.csdn.net/alsj123456/article/details/109479400?spm=1001.2014.3001.5502
代码:
data = csvread('2022.8.15 20_47_37.csv');
data_new = zeros(359,2);
for i = 1:359 %对inf进行替换,替换成0
if data(i,2) == inf
data(i,2) = 0;
end
data_new(i,:) = data(i,:);
end
data_theta = data(:,1);%角度数据
data_dis = data(:,2);%距离数据
data_x_y = zeros(359,2);%用于存储x,y坐标
data_x_y_chuli = zeros(359,2);
data_x_y_chuli_theta = zeros(359,2);
data_z = zeros(359,1);
data_z2 = ones(359,1);
for i = 1:359 %将角度和距离换算成x,y,第一列是x,第二列是y
data_new(i,1) = data_new(i,1)*pi/180;
data_x_y(i,1) = data_new(i,2).*cos(data_new(i,1));
data_x_y(i,2) = data_new(i,2).*sin(data_new(i,1));
end
% data_x = data_x_y(i,1);%x坐标
% data_y = data_x_y(i,2);%y坐标
%测试-------------------------------------
t = zeros(359,1);
n = zeros(359,1);
%需要将角度换算成弧度
for i = 1:359
t(i,1) = cos(data_new(i,1));
n(i,1) = cos(data_new(i,1)/180*pi);
end
%------------------------------------------
for i = 1:359 %对r进行筛选
if data_dis(i,1) < 0.55
data_x_y_chuli(i,1) = data_new(i,2).*cos(data_new(i,1));
data_x_y_chuli(i,2) = data_new(i,2).*sin(data_new(i,1));
end
end
for i = 1:359 %对theta进行筛选
if data_theta(i,1) > 60 && data_theta(i,1) < 120
data_x_y_chuli_theta(i,1) = data_new(i,2).*cos(data_new(i,1));
data_x_y_chuli_theta(i,2) = data_new(i,2).*sin(data_new(i,1));
end
end
figure(1);
subplot(1,2,1);
plot(data_x_y(:,1),data_x_y(:,2),'*');
grid on
subplot(1,2,2);
plot3(data_x_y(:,1),data_x_y(:,2),data_z(:,1),'*');
hold on
plot3(data_x_y(:,1),data_x_y(:,2),data_z2(:,1),'ro');
grid on
figure(2);
subplot(1,2,1);
plot(data_x_y_chuli(:,1),data_x_y_chuli(:,2),'*');
grid on
subplot(1,2,2);
plot3(data_x_y_chuli(:,1),data_x_y_chuli(:,2),data_z(:,1),'*');
hold on
plot3(data_x_y_chuli(:,1),data_x_y_chuli(:,2),data_z2(:,1),'ro');
grid on
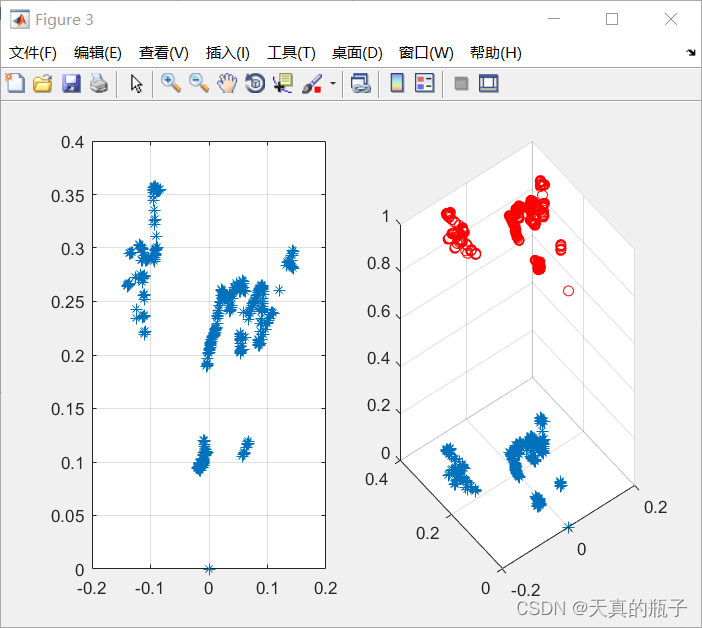
figure(3);
subplot(1,2,1);
plot(data_x_y_chuli_theta(:,1),data_x_y_chuli_theta(:,2),'*');
grid on
subplot(1,2,2);
plot3(data_x_y_chuli_theta(:,1),data_x_y_chuli_theta(:,2),data_z(:,1),'*');
hold on
plot3(data_x_y_chuli_theta(:,1),data_x_y_chuli_theta(:,2),data_z2(:,1),'ro');
grid on
figure(4);
plot(data_x_y(:,1),data_x_y(:,2));
grid on
————————————————
版权声明:本文为CSDN博主「子佩_zxt」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/alsj123456/article/details/109479400
结果:
Figure1:将原始数据中的inf换成0,x轴是距离cos角度,y轴是距离sin角度
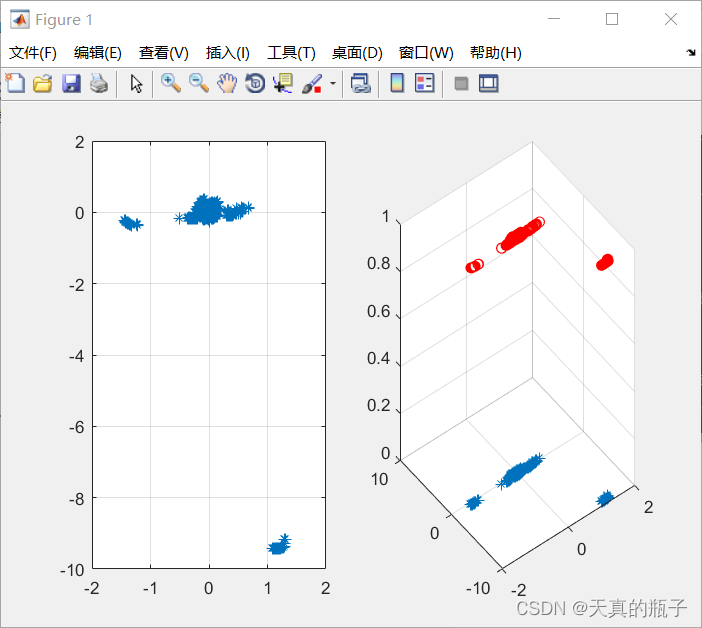
Figure2:对r进行筛选,仅保留距离小于0.55的点,x轴为rcos角度,y轴为rsin角度
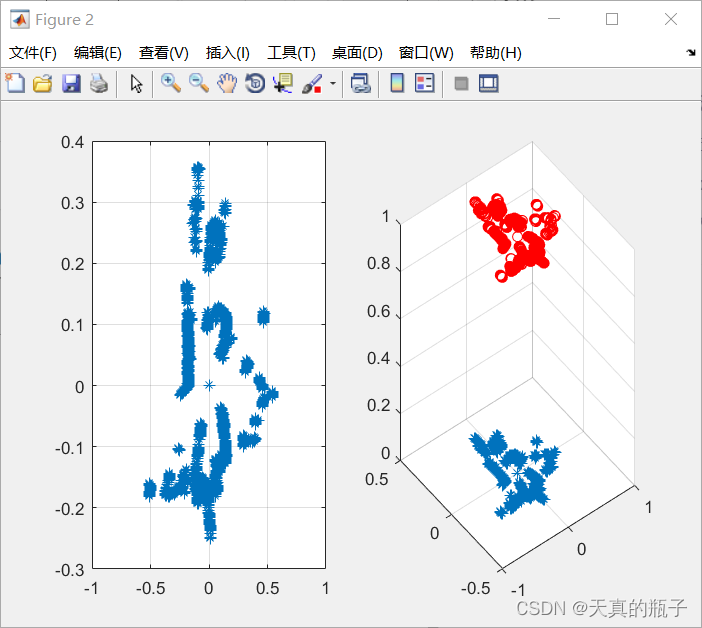
Figure3:对角度进行筛选,仅保留角度大于60小于120的点,x轴为rcos角度,y轴为rsin角度
Fifure4:同Figure1,只不过将点换成了连线
















 4703
4703











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









