







1.打开SDK/rplidar_sdk-master/workspaces/vc14(我这里是VS2019,VS2010请打开vc10),双击打开sdk_and_demo.sln
2.右键点击ultra_simple,设为启动项目

3.点击<本地windows调试器>进行调试编译
4.编译后出现output和obj两个文件夹
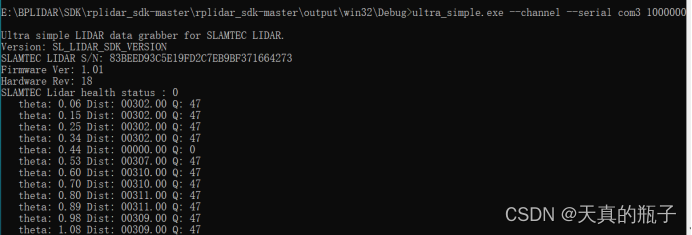
5.打开cmd.exe,并修改路径(如图),然后输入ultra_simple.exe --channel --serial com3 1000000(注意:我这里是com3端口,雷达型号为S2)
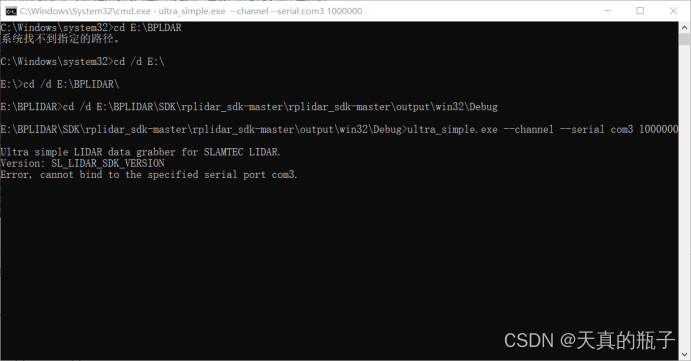
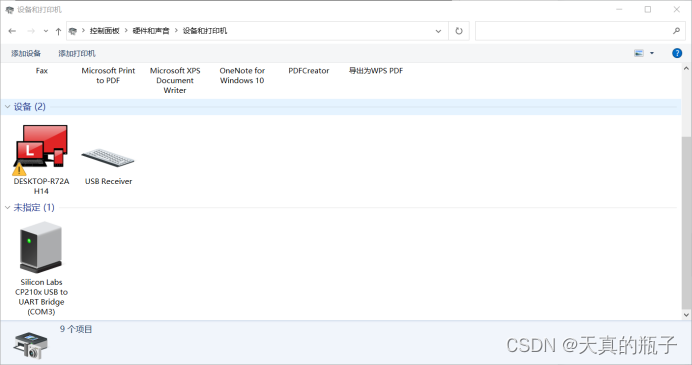
6.上述结果说明雷达没有连接成功,重新连接雷达硬件并打开控制面板查看端口
7.再次运行就成功啦
(如果出现Error,operation time out,请查看Robostudio中雷达是否为连接状态,只有Robostudio断开连接cmd才能运行成功)
8.Ctrl+C可以停止运行
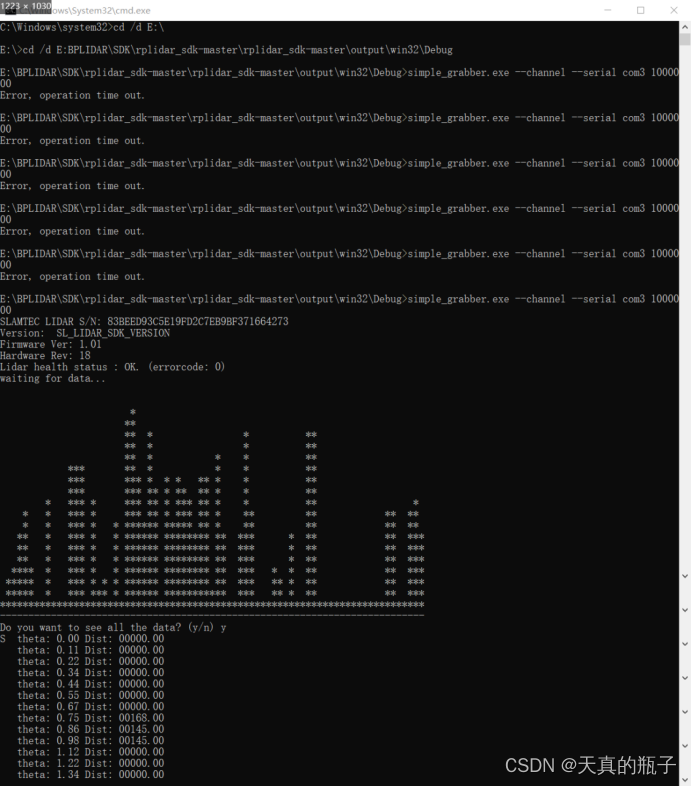
9.Simple_grabber也是同样的方法
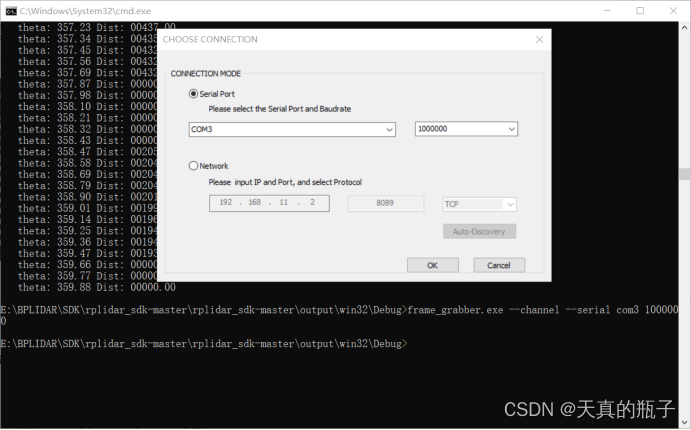
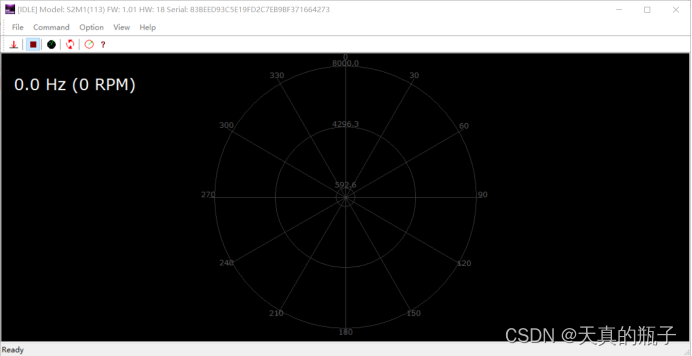
10.Frame_grabber同样














 1925
1925











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









