








ros关键组件------>qt工具箱
1.日志输出工具 rqt_console

移动小海龟历程(上个博客),可以看到打印的信息。

(此处小海龟撞墙了)

过滤日志的内容,等等
2.计算图的可视化工具rqt_graph
请参考我的博客,连接:https://blog.csdn.net/weixin_43262513/article/details/86573119

3.数据回执工具rqt_plot
请参考我的博客
https://blog.csdn.net/weixin_43262513/article/details/86573119

4.参数动态配置工具rqt_reconfigure

参数改变,对应的节点也改变。
ros最重要的工具------->rviz可视化平台
1.rviz介绍。

2.rviz软件介绍

0区域:具体显示图像区域。
1区域:rviz提供的工具,比如导航,定位等。
2区域:显示列表区域、(重要)
3区域:选择机器人不同时视角。
4区域:时间显示(单位秒)等信息。
3.rviz的使用
你需要有支持slam的小车,本人在淘宝上买的rikirobot机器人(雷达),3800元钱。功能强悍,售后还行。后来又买了Kinect摄像头,下面以Kinect介绍。
(1)启动:
rosrun rviz rviz
(2)快捷键介绍:
鼠标左键:按住不动,-------》切换机器人视角
鼠标右键:放大和缩小
鼠标滚轮:直线X,Y,Z方向移动。
(3)软件功能介绍
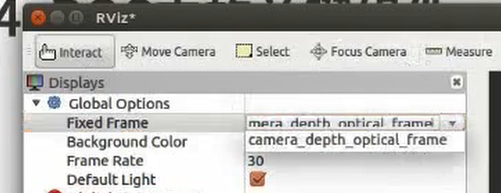
选择坐标系(有时候选择空间之后会报错,原因可能是左边细选择错误)
点击左下角的ADD按钮,加你想显示的东西的插件:
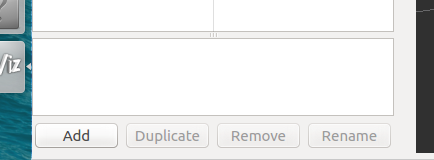
比如选择点云2:

左侧出现点云控件,选择下拉框,选择订阅的消息:

通过左侧的配置属性对点云进行调整:


ros关键组件-----》Gazebo三维物理仿真平台
1.gazebo介绍

2.界面介绍

0区域:显示机器人模型
1区域:调节灯光,视角,加入一些简单的规则形体等等
2区域:模型列表
3区域:模型属性区域
4区域:显示时间
3.gazebo的启动
1.启动一个空环境:
roslaunch gazebo_ros empty_world.launch

一直出现黑色界面看,卡住了,原因:
gazebo软件打开之后,软件自身需要下载各种模型,但是这些模型保存在外国服务器上,每次下载需要大量时间,所以一直卡在黑色界面,大家可以把模型下载下来,保存在本地,就可避免上述延时:
具体方法见我下一个博客
2.gazebo介绍

3.gazebo的使用
步骤一:创建仿真环境
步骤二:配置机器人模型
步骤三:开始仿真
图书馆闭馆了,明天更新。
















 1386
1386











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











