







 本文是《视觉SLAM十四讲 第二版》的读书笔记,重点讨论位姿图优化,包括其概念、优化问题以及在g2o和Ceres中的实现。通过实践,展示了如何在g2o中处理“球”位姿图,并对比了g2o和gtsam的优化性能。此外,还提出了对位姿图误差定义的雅可比矩阵推导及ISAM增量式优化的理解。
本文是《视觉SLAM十四讲 第二版》的读书笔记,重点讨论位姿图优化,包括其概念、优化问题以及在g2o和Ceres中的实现。通过实践,展示了如何在g2o中处理“球”位姿图,并对比了g2o和gtsam的优化性能。此外,还提出了对位姿图误差定义的雅可比矩阵推导及ISAM增量式优化的理解。
读书笔记:后端2
上讲我们重点介绍了以BA 为主的图优化。BA 能精确地优化每个相机位姿与特征点位置。不过在更大的场景中,大量特征点的存在会严重降低计算效率,导致计算量越来越大以至于无法实时化。本讲介绍两种在更大场景下使用的后端优化方法:位姿图。
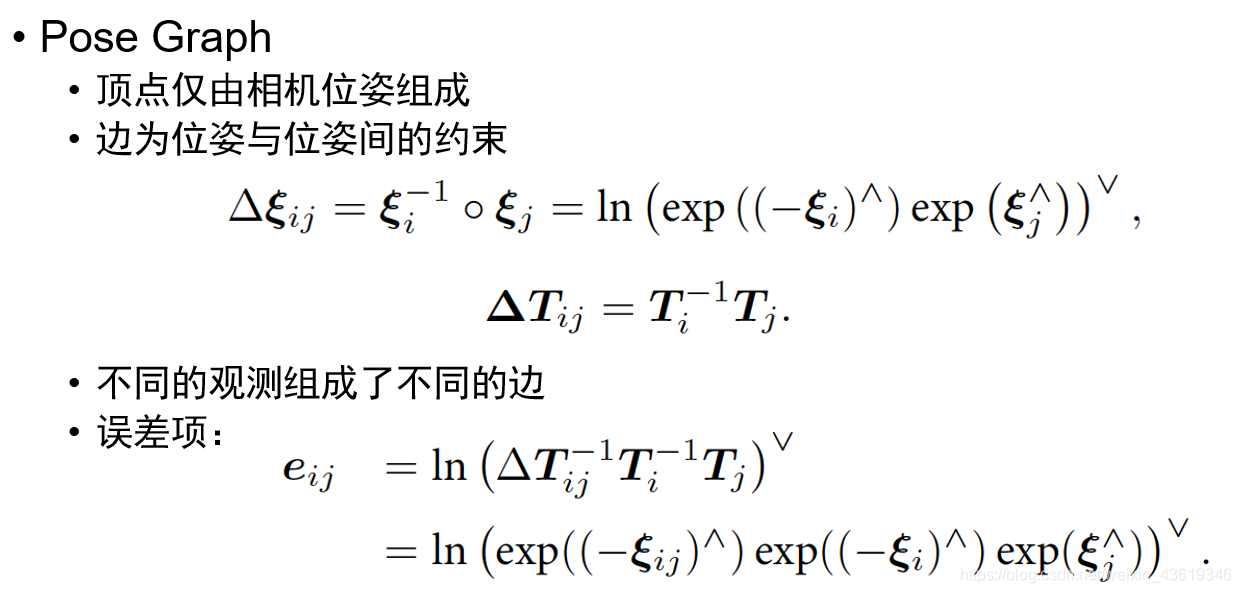
位姿图(Pose Graph)
Pose Graph即是省略了特征点的Bundle Adjustment。
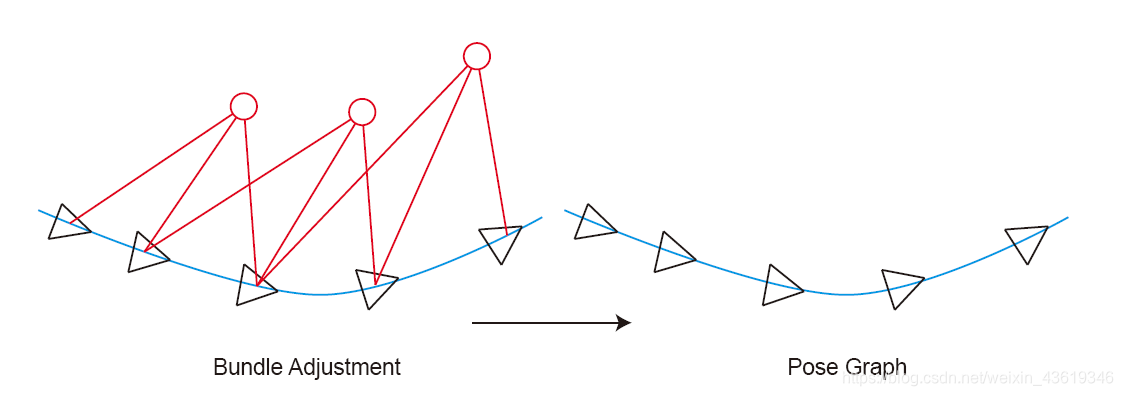 Pose Graph 示意图。当我们不再优化Bundle Adjustment 中的路标点,仅把它们看成对姿态节点的约束时,就得到了一个计算规模减小很多的Pose Graph。
Pose Graph 示意图。当我们不再优化Bundle Adjustment 中的路标点,仅把它们看成对姿态节点的约束时,就得到了一个计算规模减小很多的Pose Graph。
小结:
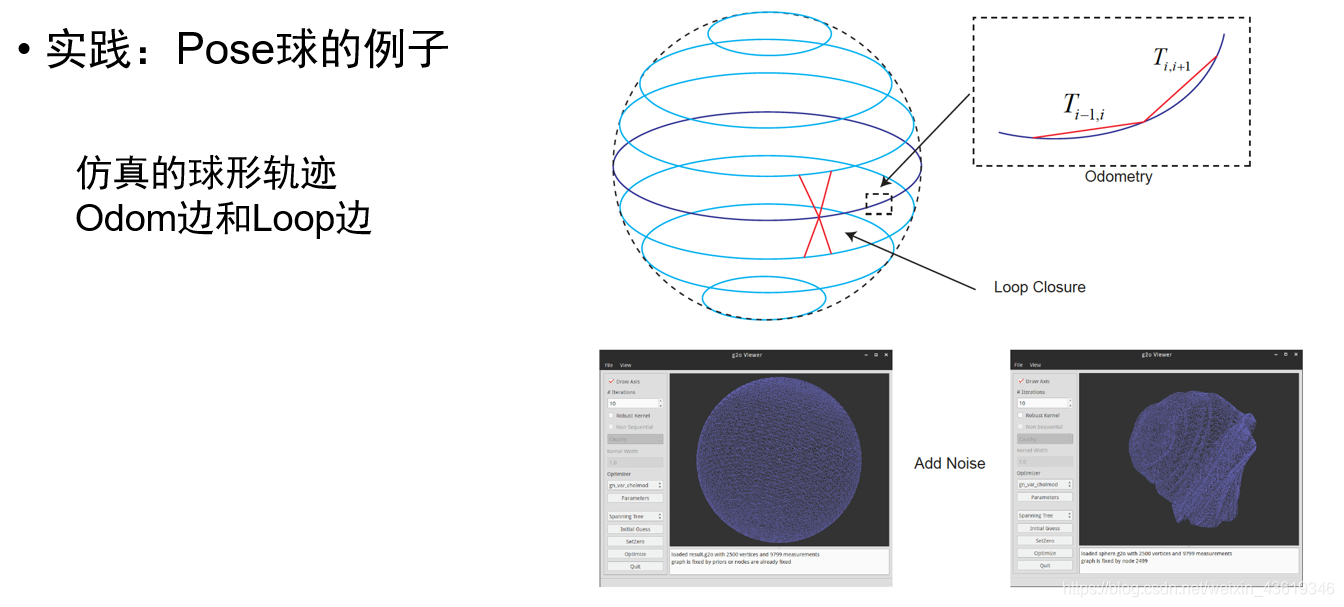
球的例子是一个比较有代表性的案例。它具有和实际中相似的里程计边(Odometry)和回环边(Loop Closure),这也正是实际SLAM 中,一个位姿图中可能有的东西。同时,“球”也具有一定的计算规模:它总共有2,500 个位姿节点和近10,000 条边,我们发现优化它费了不少时间(相对于实时性要求很强的前端来说)。另一方面,一般认为位姿图是结构最简单的图之一。在我们不假设机器人如何运动的前提下,很难再进一步讨论它的稀疏性了——因为机器人可能会直线往前运动,形成带状的位姿图,是稀疏的;也可能是“左手右手一个慢动作”,形成了大量的小型回环需要优化(Loopy motion),从而变成像“球”那样比较稠密的位姿图。无论如何,在没有进一步的信息之前,我们似乎无法再利用位姿图的求解结构了。
自从PTAM[81] 提出以来,人们就已经意识到,后端的优化没必要实时地响应前端的图像数据。人们倾向于把前端和后端分开,运行于两个独立线程之中,历史上称为跟踪(Tracking)和建图(Mapping)——虽然如此叫,建图部分主要是指后端的优化内容。通俗地说,前端需要实时响应视频的速度,例如每秒30Hz;而优化可以慢悠悠地运行,只要在优化完成时把结果返回给前端即可。所以我们通常不会对后端优化提出很高的速度要求。
实践部分
本章实验需要安装g2o库,我按照3rdparty安装之后没有g2o_viewer,显示g2o_viewer:未找到命令
,我怀疑是不是版本问题?依赖项问题?所以又只得去官方的github去重新安装g2o。安装过程如下:
sudo apt-get install libeigen3-dev
sudo apt-get install libsuitesparse-dev
sudo apt-get install qtdeclarative5-dev
sudo apt-get install qt5-qmake
sudo apt-get install libqglviewer-dev
git clone https://github.com/RainerKuemmerle/g2o.git
cd g2o
mkdir build
cd build
cmake ..
make -j4
sudo make install
安装完成之后再输入:g2o_viewer出现了报错:
g2o_viewer: error while loading shared libraries: libg2o_viewer.so: cannot open shared object file: No such file or directory
从错误来看,应该是没有找到正确的路径。上网搜了一下,具体解决方案如下:
sudo gedit /etc/ld.so.conf
添加如下代码:
/usr/local/lib
运行:
sudo ldconfig
再次运行g2o_viewer,可以看到启动成功!
pose_graph_g2o_lie_algebra:
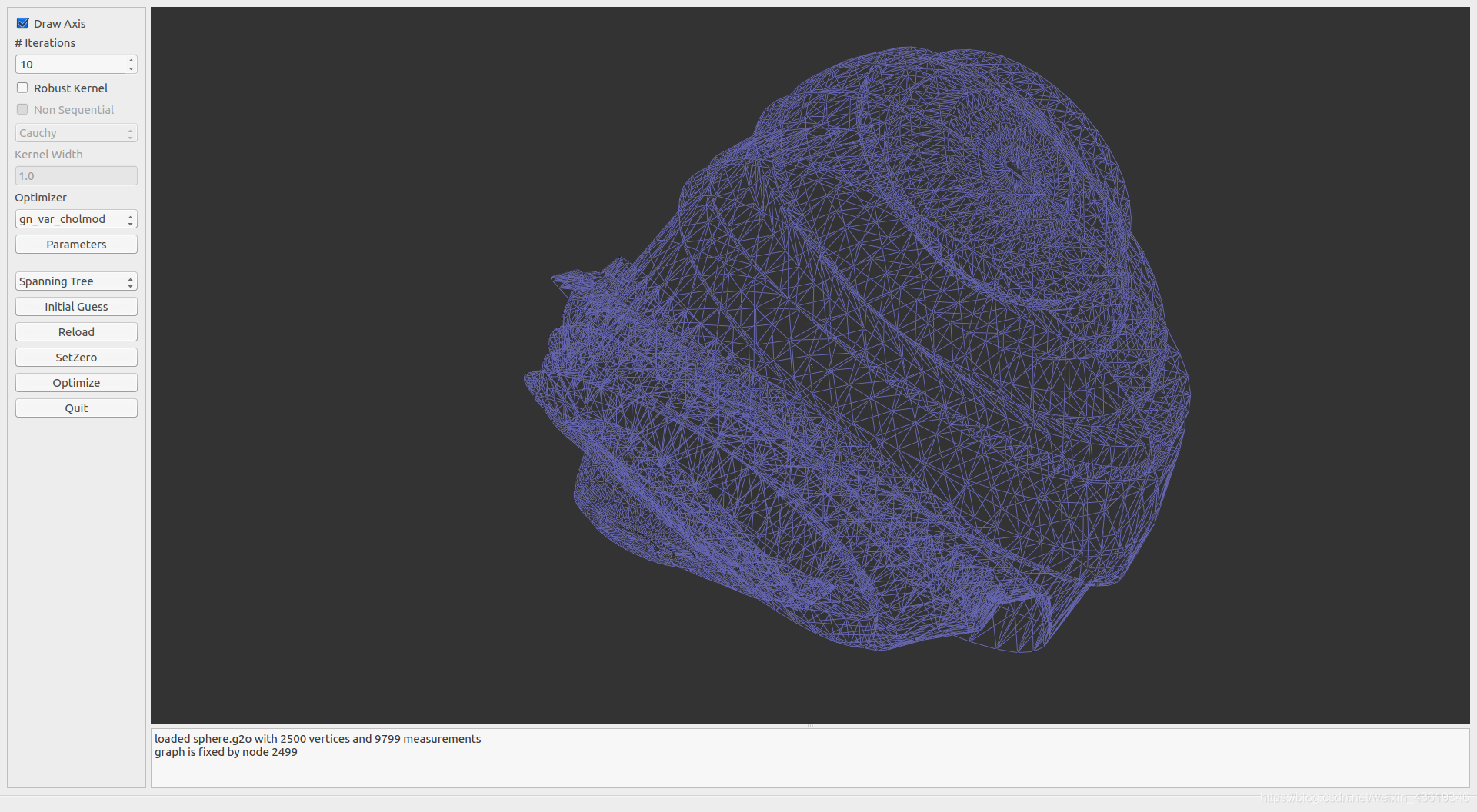
首先在ch10目录下,用g2o_viewer sphere.g2o命令打开预先生成的仿真位姿图:
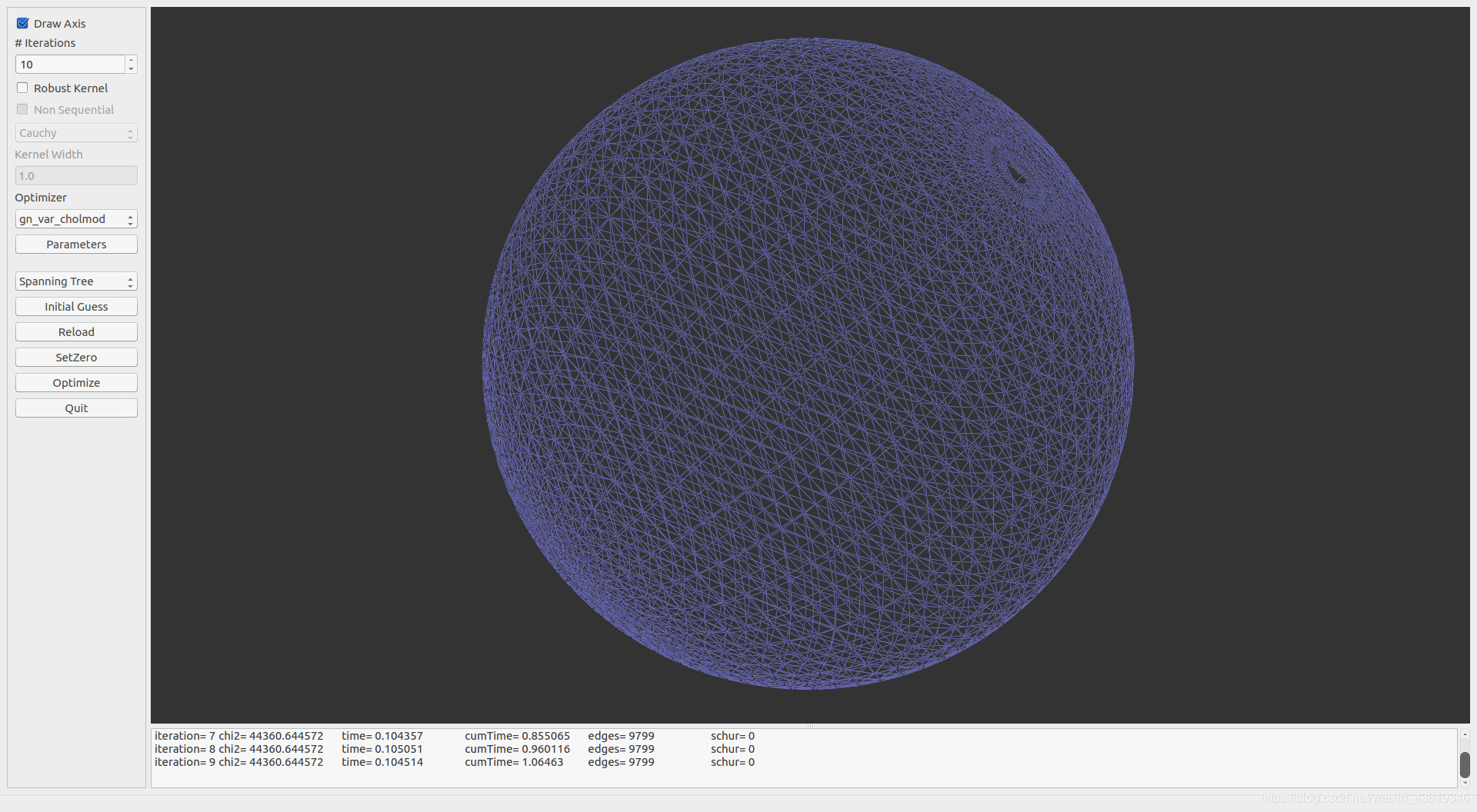
点击Optimize优化后变成一个球:
程序编译执行结果如下:
/home/wh/shenlan/slambook2/ch10/cmake-build-debug/pose_graph_g2o_lie /home/wh/shenlan/slambook2/ch10/sphere.g2o
read total 2500 vertices, 9799 edges.
optimizing . 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3478
3478

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









