







 本文介绍了四旋翼无人机的组成,包括承载系统的机架、动力系统的电池等、飞控相关的姿态采集等,以及操控系统。还阐述了其动力原理,如螺旋桨产生升力、反扭矩的抵消,六自由度运动的控制等,最后提及了无人机飞控开发平台的飞控核心。
本文介绍了四旋翼无人机的组成,包括承载系统的机架、动力系统的电池等、飞控相关的姿态采集等,以及操控系统。还阐述了其动力原理,如螺旋桨产生升力、反扭矩的抵消,六自由度运动的控制等,最后提及了无人机飞控开发平台的飞控核心。
四旋翼无人机组成
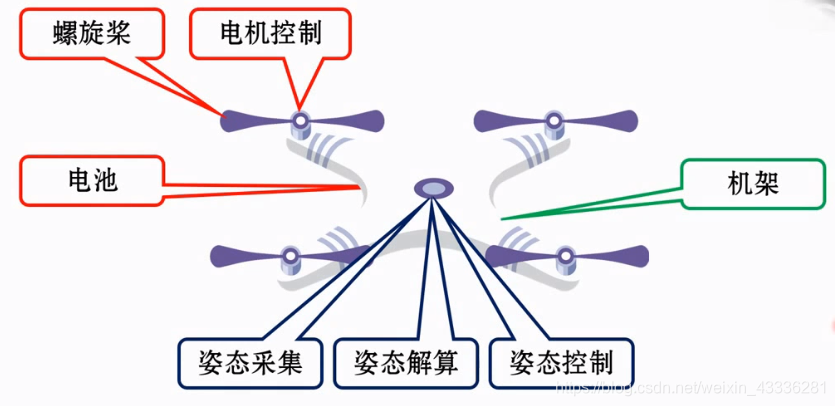
机架属于承载系统
电池、螺旋桨和电机控制属于动力系统
姿态采集、姿态解算和姿态控制属于飞控
操控系统(遥控器)如果是自动巡航或者自动寻迹则操控系统非必须
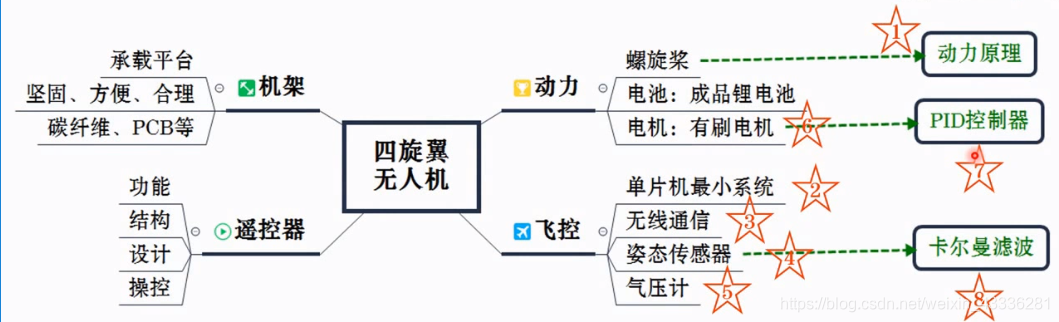
课程体系
动力原理——螺旋桨
·螺旋桨、轮子——神奇的发明
·多旋翼无人机也是由电机的旋转带动螺旋桨产生升力而飞起来的

动力原理——升力的产生
·伯努利定理——简单说,就是流苏大,压强小;流速小,压强大。
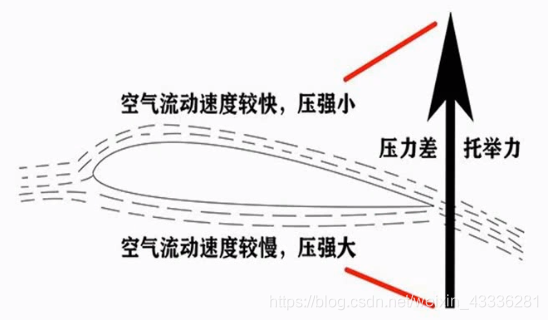
螺旋桨进行剖面分析,上表面大于下表面面积。
单位时间内,空气流经下表面的速度大于上表面。
上下表面产生的压差使浆叶产生升力。
动力原理——反扭矩
·螺旋桨在旋转的同时,也会同时向电机施加一个反作用力(反扭矩),促使电机向反方向旋转。

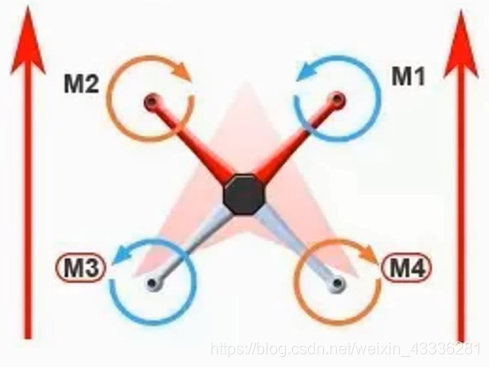
·螺旋桨M1、M3的旋转方向为逆时针,螺旋桨M2、M4的旋转方向为顺时针。
·当飞行时,M2、M4产生的逆时针作用力(扭矩)和M1、M3产生的顺时针反作用力(反扭矩)相抵消,飞机机身就可以保持稳定。
动力原理——六自由度运动
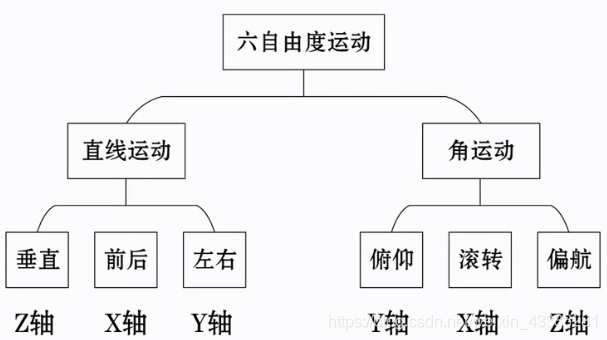
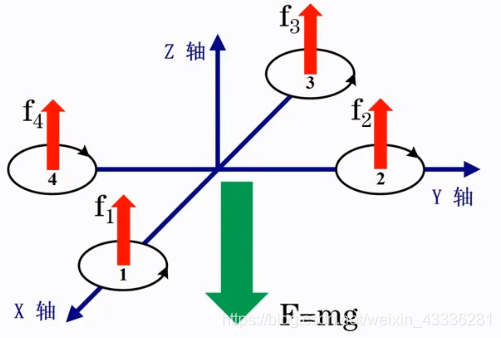
F=f2+f2+f3+f4 = = 》 悬停
F>f1+f2+f3+f4 = = 》 下降
F<f1+f2+f3+f4 = = 》 上升
f2、f4不变,f1上升、f3下降 = = 》 俯仰 Pitch
f1、f3不变,f2上升、f4下降 = = 》 翻滚 Roll
f1、f3上升,f2、f4下降 = = 》 偏航Yaw
旋翼无人机运动本质就是控制电机的速度,相应地提高、减慢速度就可以让无人机以各种状态运动起来。
无人机飞控开发平台组成
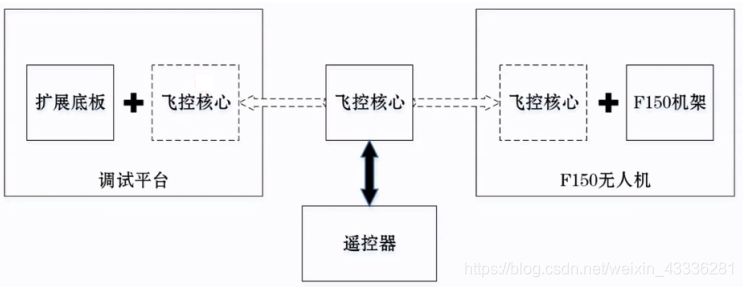
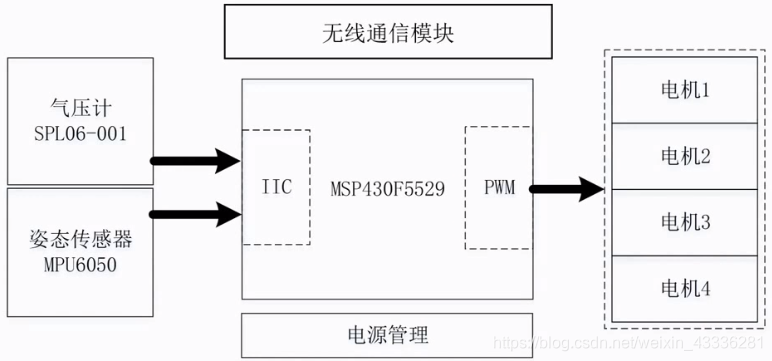
无人机飞控平台组成——飞控核心


















 4530
4530

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











