







在小车配置LIO-SAM的基础上,在虚拟机端运行
环境配置: ubuntu18.04, ros1(ros-melodic)
必须安装gtsam4.0.2版本
Park数据集下运行(GPS)
需要修改的参数:
- 将"config/params.yaml"中的"gpsTopic"改为"odometry/gps"
- 将"config/params.yaml"中的"useImuHeadingInitialization"改为true
- 可调整参数:
- gpsCovThreshold:过滤不良 GPS 读数
- poseCovThreshold:GPS 因子添加到图形的频率
- 注释掉run.launch中的运行rviz的部分
- 调整TIMEOUT_SIGINT数值(默认15s,改为60s),否则可能导致地图保存失败
sudo gedit /opt/ros/melodic/lib/python2.7/dist-packages/roslaunch/nodeprocess.py - 保存地图
将"config/params.yaml"中 savePCD: true
savePCDDirectory: “保存路径” - > 保存到小车端
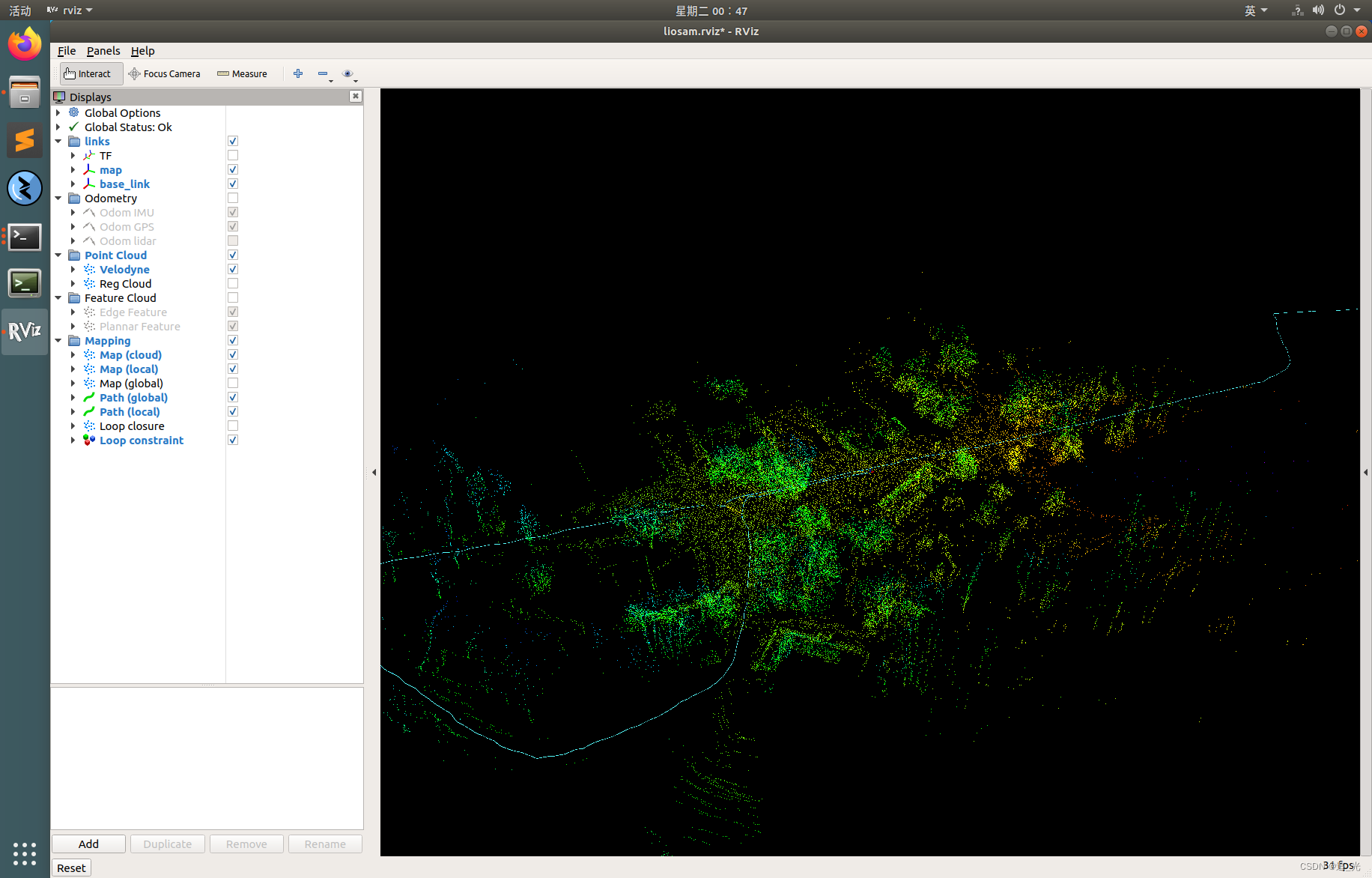
注:先关闭 lio-sam 相关节点再关闭 rviz - rviz
- 在配置rviz.rviz的基础上,再选中"Map(local)”
- Map(local)中的delay设置时长300,可以查看长时间的点云图
运行:
小车端:
roslaunch lio_sam run.launch
cd bag的存放位置
rosbag play park.bag
虚拟机端:
rviz
并File-open config-rviz.rviz
结果:
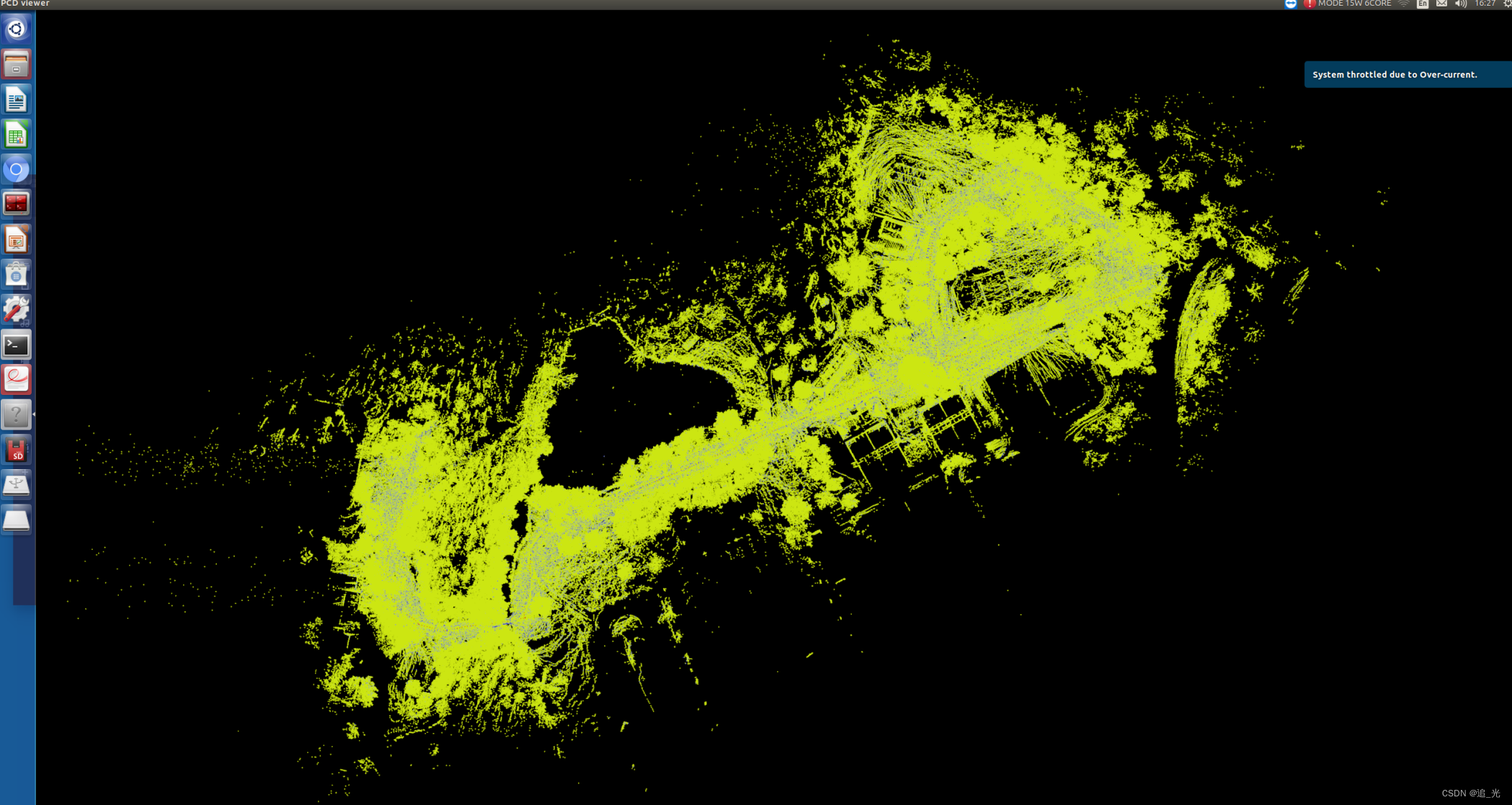
查看保存后的点云map:
pcl_viewer CornerMap.pcd GlobalMap.pcd SurfMap.pcd trajectory.pcd transformations.pcd
小车实时(无GPS)
待续
小车实时(GPS)
待续
适配kitti数据集链接:https://blog.csdn.net/qq_40528849/article/details/129864881















 856
856











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









