






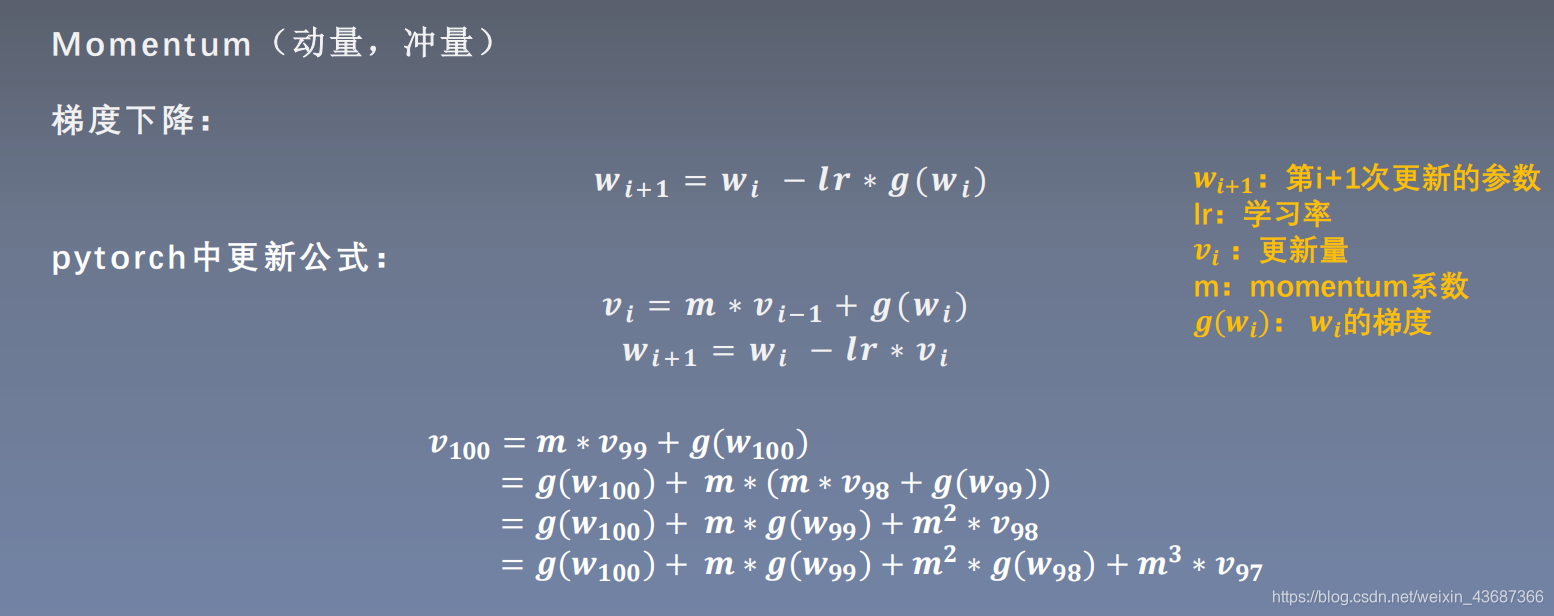
一、Momentum:(动量,冲量):结合当前梯度与上一次更新信息,用于当前更新;
二、Momentum的作用?
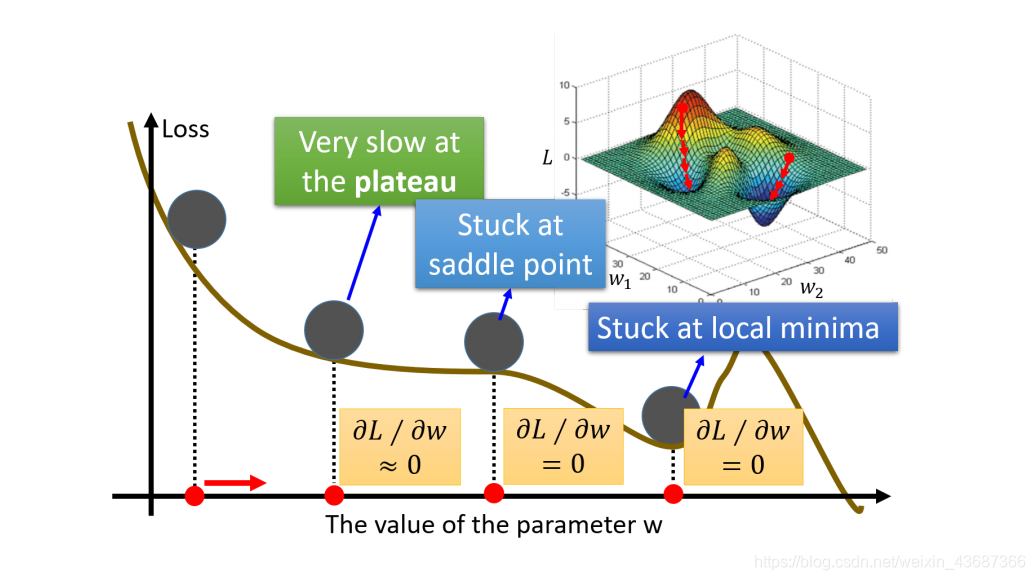
主要是在训练网络时,最开始会对网络进行权值初始化,但是这个初始化不可能是最合适的;因此可能就会出现损失函数在训练的过程中出现局部最小值的情况,而没有达到全局最优的状态。
momentum的出现可以在一定程度上解决这个问题。动量来源于物理学,当momentum越大时,转换为势能的能量就越大,就越有可能摆脱局部凹区域,从而进入全局凹区域。momentum主要是用于权值优化。
没引入momentum之前的权重更新:

上面的权重更新可以通过下图进行理解!
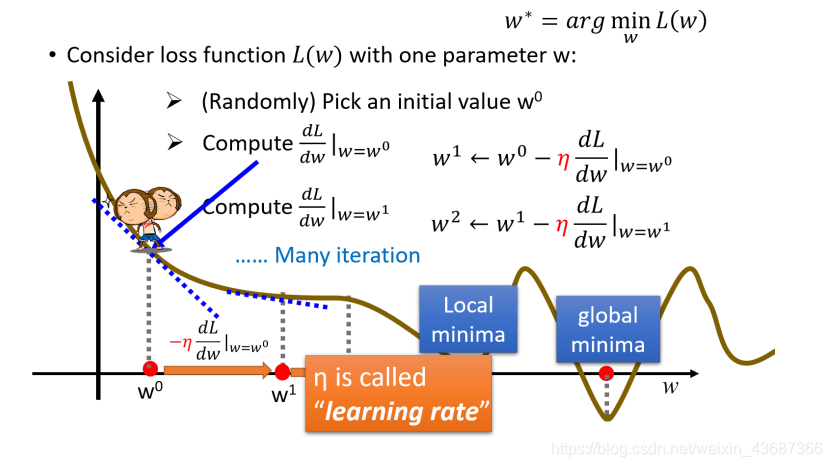
以单个参数w的损失函数L(w)为例,前提这个损失函数是可微的;

主要目的就是求解使得上述Loss的最小的 ,实际上就是寻找切线L斜率为0的全局最小值(这里可能会出现局部最小值,斜率也为0,也就引出了下面的momentum)
,实际上就是寻找切线L斜率为0的全局最小值(这里可能会出现局部最小值,斜率也为0,也就引出了下面的momentum)
最简单的方法就是遍历所有的w的值,去找到使得loss最小的,但是这样做一点效率也没有;使用梯度下降法可以很好地解决这个问题;
- 首先随机选取一个初始的点
 (当然也不一定要随机选取,如果有办法可以得到比较接近 的表
现得比较好的当初始点,可以有效地提高查找的效率)
(当然也不一定要随机选取,如果有办法可以得到比较接近 的表
现得比较好的当初始点,可以有效地提高查找的效率)
- 计算L在
 的位置的微分,
的位置的微分, ,几何角度就是切线的斜率;
,几何角度就是切线的斜率; -
如果切线斜率是negative负的,那么就应该使w变大,即往右踏一步;如果切线斜率是positive正的,那么就应该使w变小,即往左踏一步,每一步的步长step_size就是w的改变量w的改变量step_size的大小取决于两件事
- 一是现在的微分值
 有多大,微分值越大就表示所在位置比较陡峭,那么它将要移动的距离就越大,反之就越小;
有多大,微分值越大就表示所在位置比较陡峭,那么它将要移动的距离就越大,反之就越小; - 二是一个常数项
 ,其实就是学习率;它决定了每次踏出的step_size不仅取决于现在的斜率,还取决于提前设置好的学习率值,如果设置的学习率值比较大,那么每次踏出一步的时候,参数w更新的幅度就比较大,反之参数更新的幅度就比较小;学习也不能太大,太大可能会直接跳过全局最小值点;
,其实就是学习率;它决定了每次踏出的step_size不仅取决于现在的斜率,还取决于提前设置好的学习率值,如果设置的学习率值比较大,那么每次踏出一步的时候,参数w更新的幅度就比较大,反之参数更新的幅度就比较小;学习也不能太大,太大可能会直接跳过全局最小值点;
4.因此每次参数更新的大小是 ,为了满足斜率为负时w表大,斜率为正时w表小,应该使原来的w减去更新的数值,可以结合上图梯度下降法进行理解;即下式
,为了满足斜率为负时w表大,斜率为正时w表小,应该使原来的w减去更新的数值,可以结合上图梯度下降法进行理解;即下式
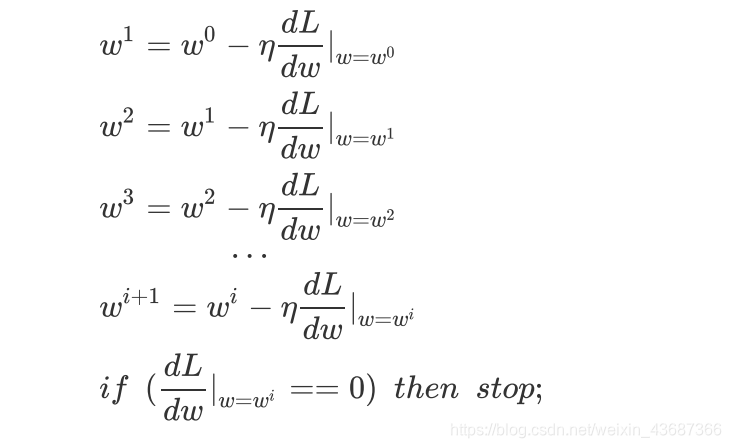
此时的 对应的斜率为0,我们找到了一个局部最小值,但是一旦出现微分为0的情况,参数就不会再继续更新了,但是这个没办法满足全局最小值;这个情况可以结合下图进行理解;于是引出了增加momentum的方法;下面继续看增加momentum的情况;
对应的斜率为0,我们找到了一个局部最小值,但是一旦出现微分为0的情况,参数就不会再继续更新了,但是这个没办法满足全局最小值;这个情况可以结合下图进行理解;于是引出了增加momentum的方法;下面继续看增加momentum的情况;
上面是针对单一参数而言的,针对多个参数的情况也是和处理单个参数的问题一样的,这里就不多赘述了。
引入momentum之后:


其中 表示权重,
表示权重, 表示学习率,
表示学习率, 表示的导数,
表示的导数, 表示速度,一般初始化为0;
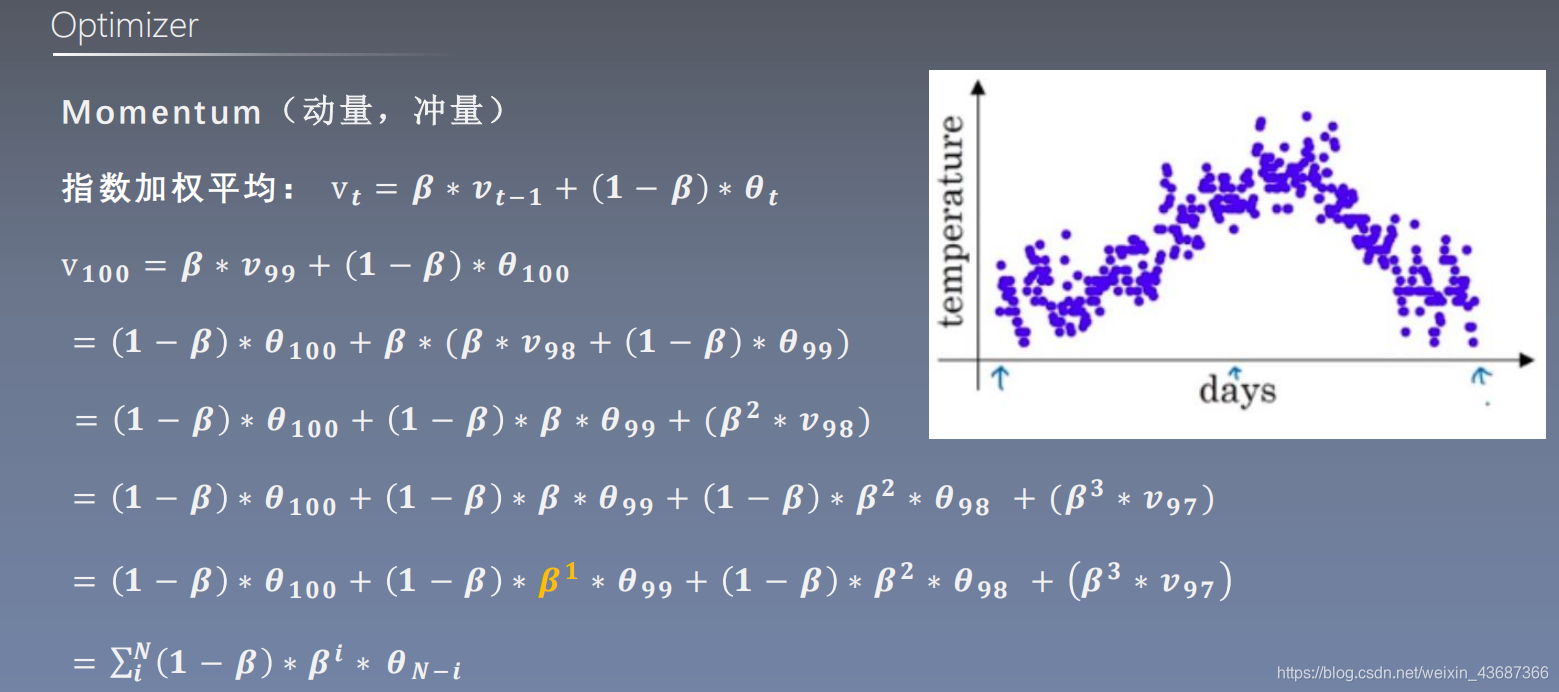
表示速度,一般初始化为0; 就是引入的动量,一般是设置为0.9。可以理解为,如果上一次的
就是引入的动量,一般是设置为0.9。可以理解为,如果上一次的  与当前的负梯度方向是相同的,那这次下降的幅度就会加大,从而可以加快模型收敛。
与当前的负梯度方向是相同的,那这次下降的幅度就会加大,从而可以加快模型收敛。
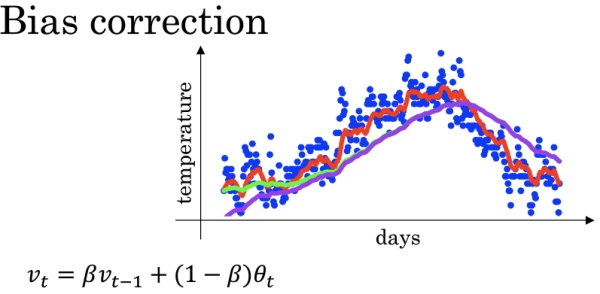
指数加权平均:参考:通俗理解指数加权平均
通过代码进一步理解:
1、首先看一下指数加权平均
import torch
import numpy as np
import torch.optim as optim
import matplotlib.pyplot as plt
torch.manual_seed(1)
# 指数加权平均
def exp_w_func(beta,time_list):
return [(1 - beta)*np.power(beta,exp) for exp in time_list]
beta = 0.9
num_point = 100
time_list = np.arange(num_point).tolist()
# 指数权重
weights = exp_w_func(beta,time_list)
plt.plot(time_list,weights,'-ro',label="Beta:{}\ny = B^t * (1-B)".format(beta))
plt.xlabel("time")
plt.ylabel("weight")
plt.legend()
plt.title("exponentially weighted average")
plt.show()
print(np.sum(weights))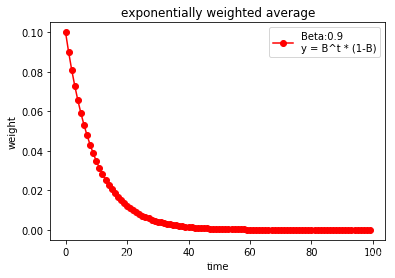
0.9999734386011124
2、针对多个动量的情况
# multi weights
# 通常都是设置动量为0.9
beta_list = [0.98,0.95,0.9,0.8]
w_list = [exp_w_func(beta,time_list) for beta in beta_list]
for i,w in enumerate(w_list):
plt.plot(time_list,w,label="Beta:{}".format(beta_list[i]))
plt.xlabel("time")
plt.ylabel("weight")
plt.legend()
plt.show()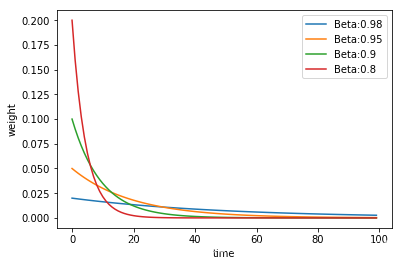
3、optim.SGD中的momentum
# SGD中的momentum
def func(x):
return torch.pow(2*x,2) # y = (2x)^2 = 4*x^2 dy/dx = 8x
iteration = 100
m = 0.9
lr_list = [0.01,0.03]
momentum_list = list()
loss_rec = [[] for l in range(len(lr_list))]
iter_rec = list()
for i,lr in enumerate(lr_list):
x = torch.tensor([2.],requires_grad=True)
momentum = 0. if lr == 0.03 else m
momentum_list.append(momentum)
optimizer = optim.SGD([x],lr=lr,momentum=momentum)
for iter in range(iteration):
y = func(x)
y.backward()
optimizer.step()
optimizer.zero_grad()
loss_rec[i].append(y.item())
for i,loss_r in enumerate(loss_rec):
plt.plot(range(len(loss_r)),loss_r,label="LR:{} M:{}".format(lr_list[i],momentum_list[i]))
plt.legend()
plt.xlabel("Iteration")
plt.ylabel('Loss value')
plt.show()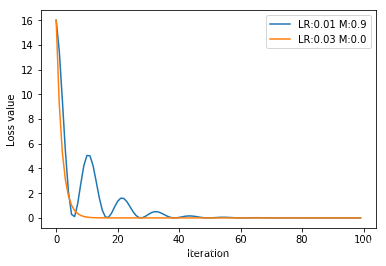
可以看出增加了动量的loss呈现波动,但是可以很快达到最小值,同样也会逐渐趋于平缓。


















 2752
2752

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











