






 本文探讨了针孔相机模型中相机坐标系与世界坐标系的转换,通过避免矩阵求逆,解释了相机位置和朝向的推导,并介绍了相机模型从坐标系到图像坐标系的转化实例。深入浅出地为SLAM理解提供基础知识。
本文探讨了针孔相机模型中相机坐标系与世界坐标系的转换,通过避免矩阵求逆,解释了相机位置和朝向的推导,并介绍了相机模型从坐标系到图像坐标系的转化实例。深入浅出地为SLAM理解提供基础知识。
目标:理解针孔相机模型,以及它在世界坐标系的转换。
前言:这篇blog,所用的 R , t R,t R,t都是相机坐外参。
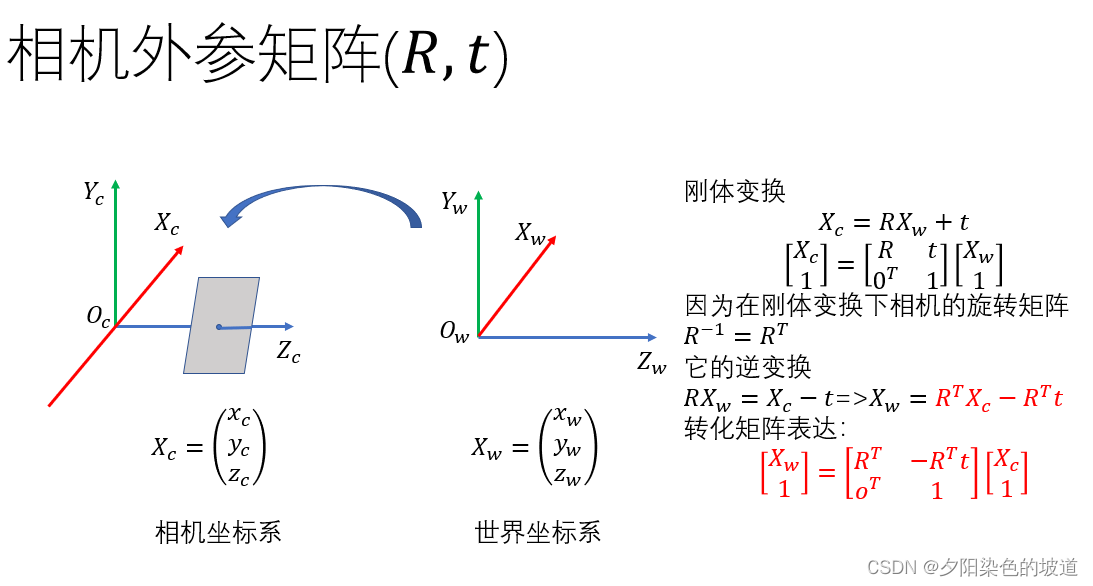
1)相机坐标系和世界坐标系的转换,经常遇到它们的矩阵求逆的过程。但是矩阵逆变化对于计算机来说是很耗时间的。因此在另一中矩阵变化中,避免矩阵求逆的过程。它们的推导参考下面图像
2)相机位置(它指的是相机的中心点在世界坐标系的位置)
在传统的计算中,常常遇到相机位置这样的概念。这blog从推导的角度理解相机位置,以及它的推导。见下面图片。
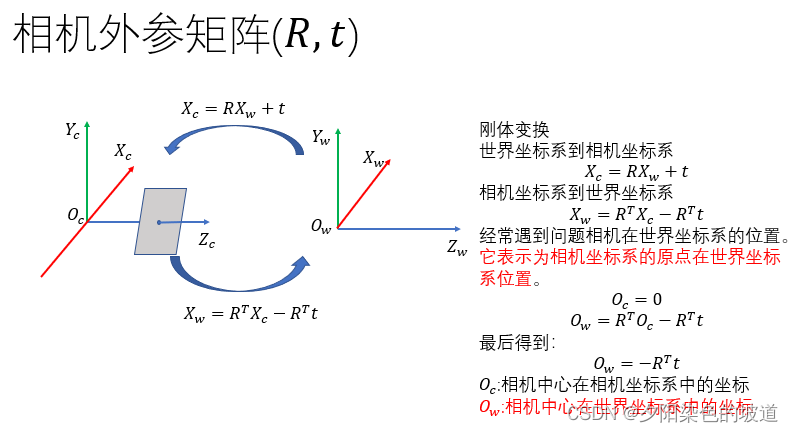 从图像中的推导可以看出,相机的坐标系就是
O
w
=
−
R
T
t
O_w=-R^Tt
Ow=−RTt,这个推导更容易理解,且不用求逆等等操作。它其实跟相机的姿态的第
4
4
4列是等效的。后面将给予数值证明。
从图像中的推导可以看出,相机的坐标系就是
O
w
=
−
R
T
t
O_w=-R^Tt
Ow=−RTt,这个推导更容易理解,且不用求逆等等操作。它其实跟相机的姿态的第
4
4
4列是等效的。后面将给予数值证明。
3)相机的朝向(它指的是相机的
z
z
z轴在世界坐标系的朝向)
在传统的计算中,常常遇到相机朝向这样的概念。见下面推导。
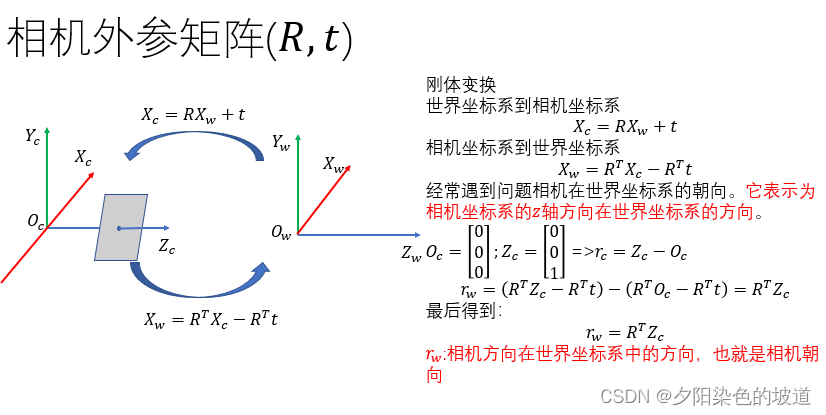
从上述推导可以看出,相机的朝向是相机的外参旋转矩阵
R
R
R的第三行。
4)相机模型的转化(相机坐标系到图像坐标系的转化,见上一个blog),这里介绍深蓝学院的一个课程,如果对slam感兴趣可以搜索一下。讲的很详细。转化的过程,见下图。
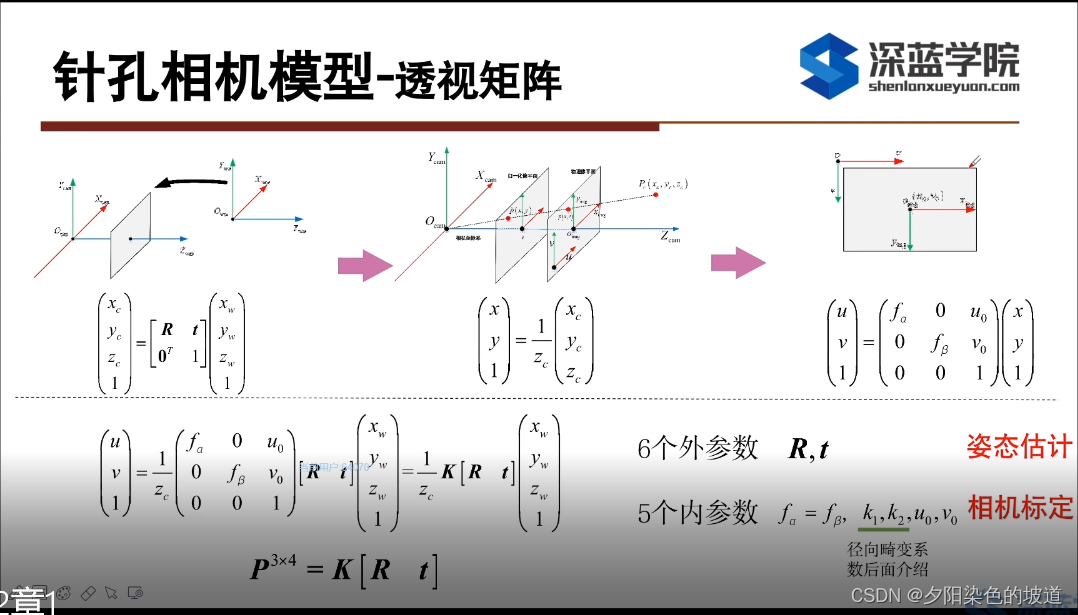
图上理解基本的相机模型。对后续优化相机,有初步的理解。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









