






 本文详细介绍了如何通过ArduPilot控制Siyi相机和云台,包括接线、串口设置、参数配置以及各种模式下的操作指南,还涵盖了相机和云台的控制方法,如快门、俯仰、偏航等。
本文详细介绍了如何通过ArduPilot控制Siyi相机和云台,包括接线、串口设置、参数配置以及各种模式下的操作指南,还涵盖了相机和云台的控制方法,如快门、俯仰、偏航等。
相机和云台
如何控制云台?
如何控制快门 ?
云台
最多支持 3 axis 的云台;
控制相机转动的机构;
视频质量差可能的原因
https://ardupilot.org/copter/docs/common-cameras-and-gimbals.html#common-fixes-for-poor-video-quality
siyi 相机 ZR10, ZR30, A8
ArduPilot 4.3.1 及以上版本;
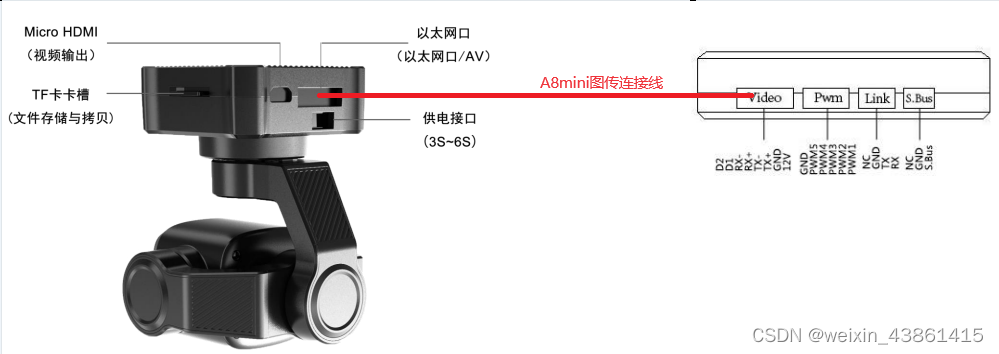
接线
串口连接
下面是ZR10, ZR30 and A8 的接线示意图:
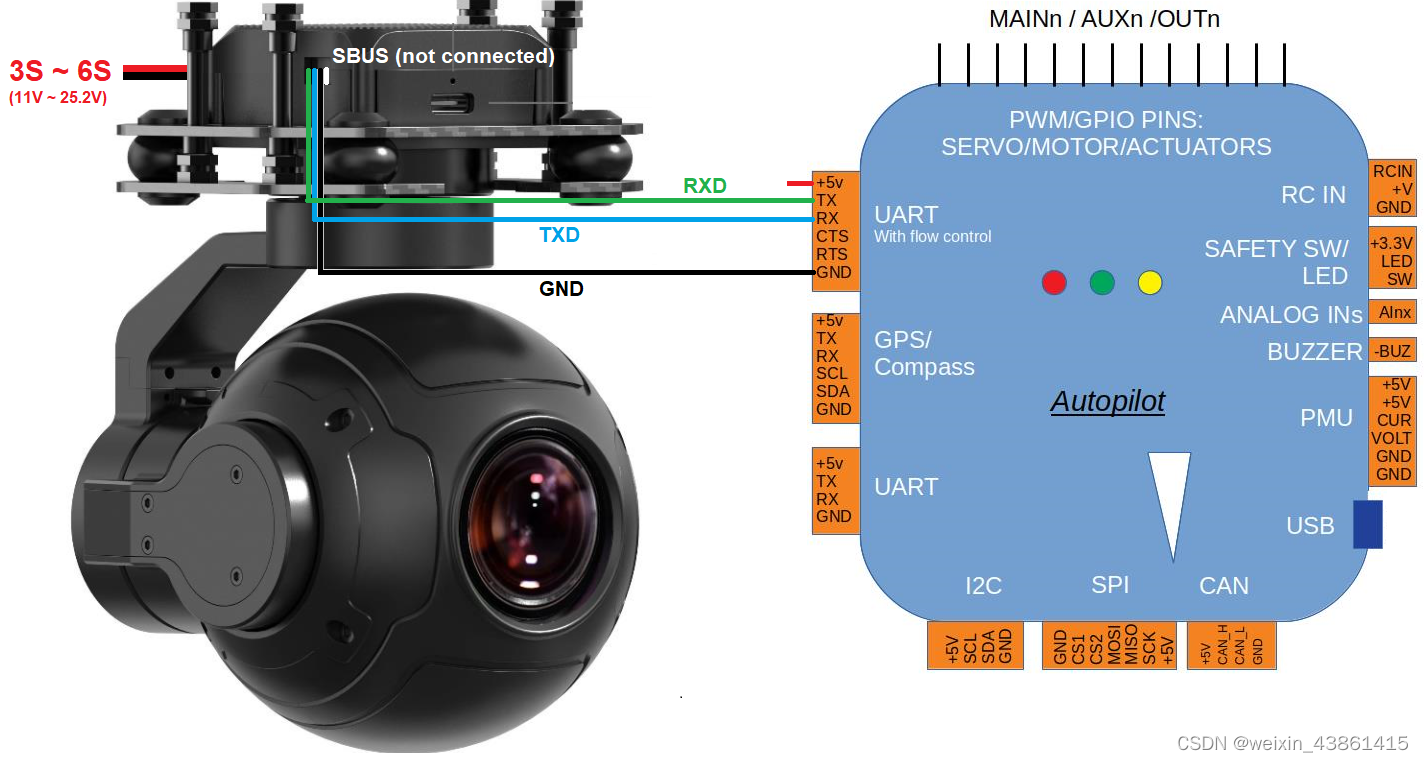
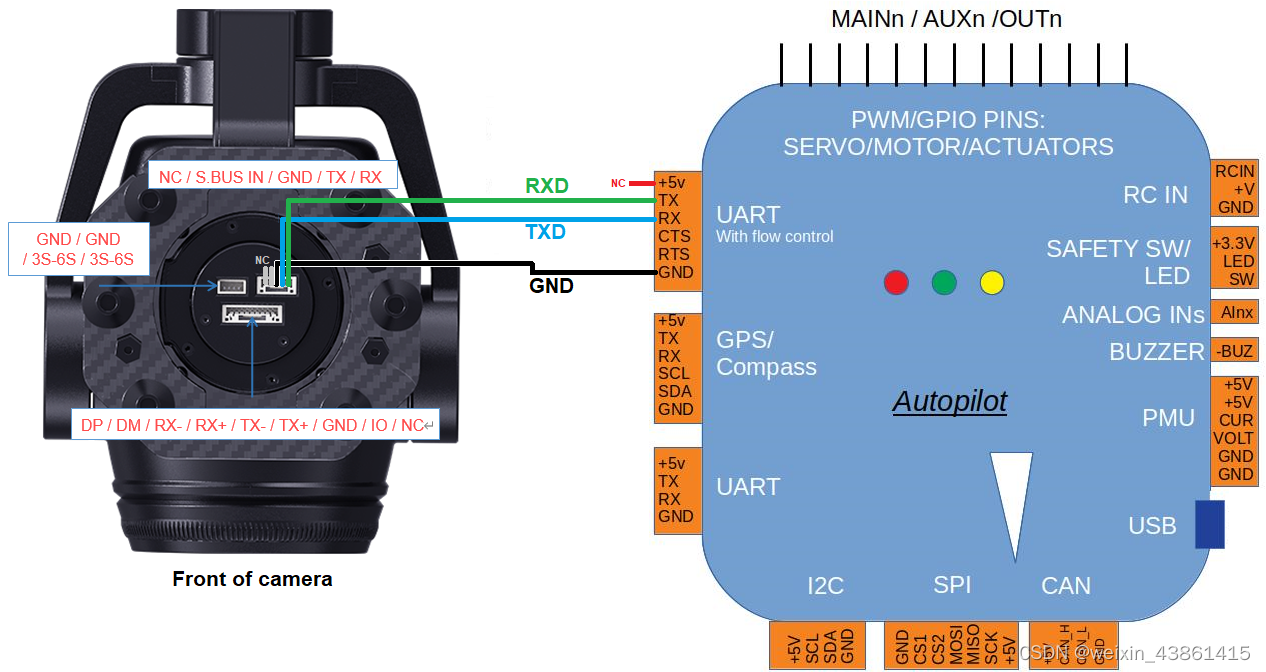
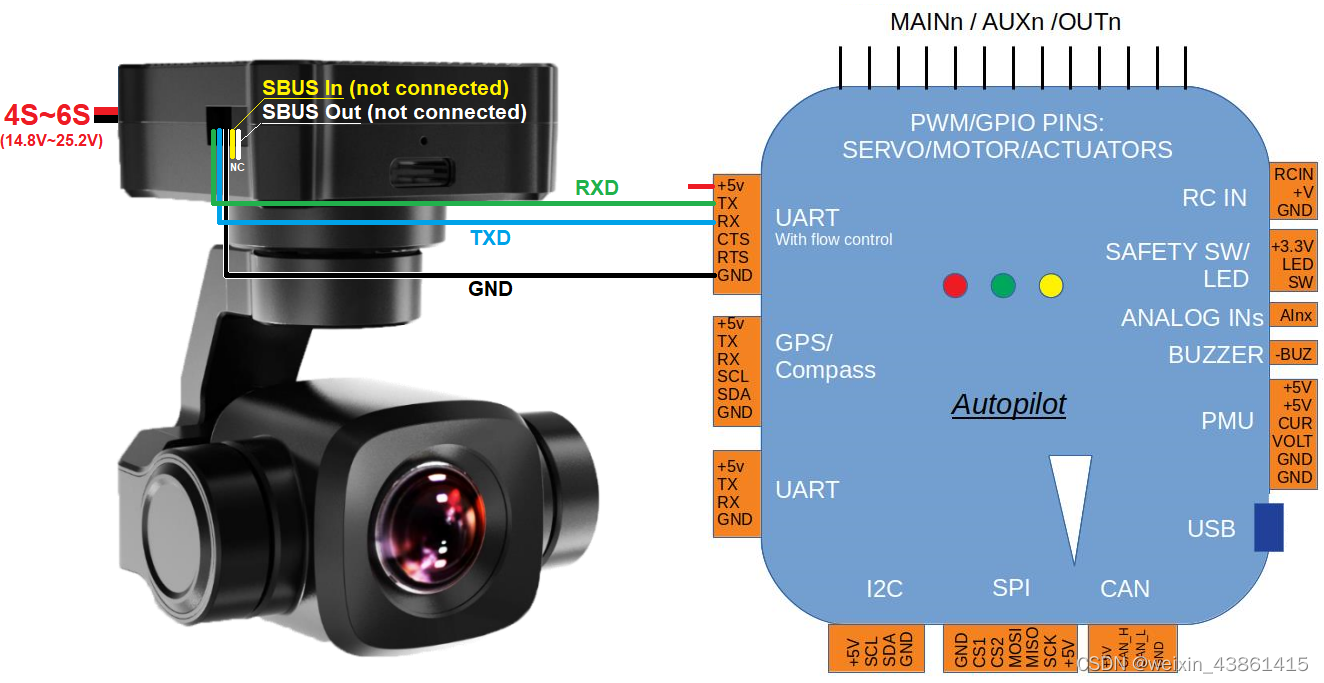
将 RX, TX and GND 与飞控的串口连接,云台相机的电源单独供电(电压如上图),不使用串口的供电;
参数配置
以串口2为例:
SERIAL2_PROTOCOL to 8 (“SToRM32 Gimbal Serial”)
SERIAL2_BAUD to “115” for 115200 bps
MNT1_TYPE to “8” (“Siyi”) and reboot the autopilot
MNT1_PITCH_MIN to -90 最小俯仰角
MNT1_PITCH_MAX to 25 最大俯仰角
MNT1_YAW_MIN to -135 最小偏航角
MNT1_YAW_MAX to 135 最大偏航角
云台和相机控制:
注意:siyi云台不支持roll 轴的控制!!
MNT1_RC_RATE to 90 (deg/s) to control speed of gimbal when using RC targetting,云台角速度
RC6_OPTION = 213 (“Mount Pitch”) to control the gimbal’s pitch angle with RC channel 6,控制云台俯仰
RC7_OPTION = 214 (“Mount Yaw”) to control the gimbal’s yaw angle with RC channel 7,控制云台偏航
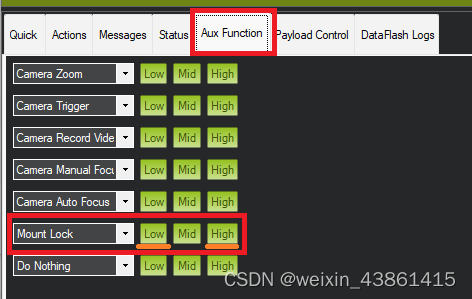
RC8_OPTION = 163 (“Mount Lock”) 控制云台的heading是保持不动还是跟随飞机机体,即follow和lock;
CAM1_TYPE to 4 / “Mount (Siyi) For AP4.4 (or later) to allow control of the camera 相机类型
CAM_TRIGG_TYPE to 3 / “Mount (Siyi)” For AP4.3 (or earlier) to allow control of the camera 相机类型
RC9_OPTION = 9 (“Camera Trigger”) to take a picture 拍照
RC9_OPTION = 166 (“Camera Record Video”) to start/stop recording of video 录视频
RC9_OPTION = 167 (“Camera Zoom”) to zoom in and out 变距
RC9_OPTION = 168 (“Camera Manual Focus”) to adjust focus in and out 手动对焦
RC9_OPTION = 169 (“Camera Auto Focus”) to trigger auto focus 自动对焦
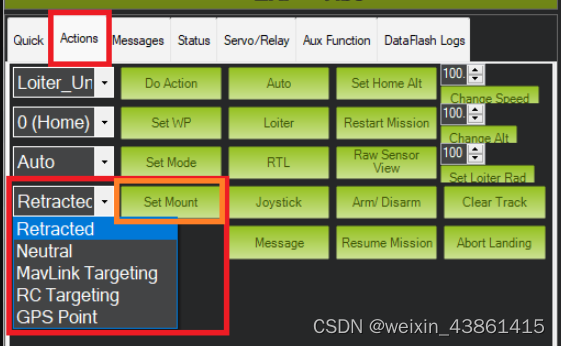
6种模式可选控制云台/挂载
Retract Mode
MNT1_DEFLT_MODE=0;
云台的roll, pitch, yaw 由这几个参数决定:MNT1_RETRACT_X, MNT1_RETRACT_Y, MNT1_RETRACT_Z ;
Neutral Mode
MNT1_DEFLT_MODE=1;
云台的roll, pitch, yaw 由这几个参数决定:MNT1_NEUTRAL_X, MNT1_NEUTRAL_Y, MNT1_NEUTRAL_Z ;
MAVLink Targeting
MNT1_DEFLT_MODE=2;
云台的roll, pitch, yaw 由 MAVLink commands 决定:
RC Targeting
MNT1_DEFLT_MODE=3
云台的roll, pitch, yaw 由 RCx_OPTION(遥控器) 决定,例如 RC6_OPTION = 213 (“Mount Pitch”) ;
GPS Point
MNT1_DEFLT_MODE=4
same as MAVLink targeting but the gimbal points at a specific location. Users never need to actively set the gimbal to this mode;
SysId Target
MNT1_DEFLT_MODE=5
the gimbal points at another vehicle with a specified MAVLink system id. Users never need to actively set the gimbal to this mode and there are no known GCSs that support setting the system id;
Home Location
MNT1_DEFLT_MODE=6
the gimbal points at home (normally its takeoff location);
可通过参数 MNT1_DEFLT_MODE 来设置模式;
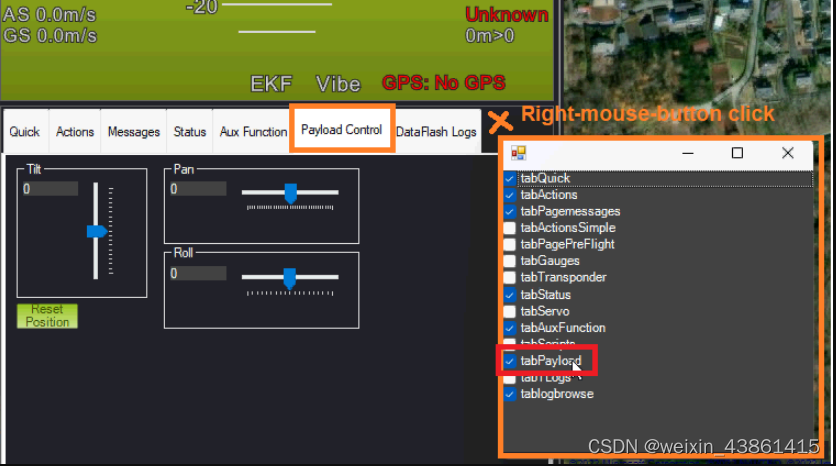
或者通过地面站来设置模式:
MAVLink Targeting模式下地面站如何控制云台和相机?
roll, pitch, yaw :
Mount lock:
视频流实时显示和A8mini控制
数传设备选择:
MK32 手持地面站(MK32标准套装):MK32天空端,MK32地面端

HM30 图传模块

以MK32 手持地面站为例:
将MK32天空端的网口与A8 mini的网口用A8 mini 思翼图传连接线(发货时的标配)连接;
将地面站上运行的 SIYI FPV 应用更新到最新版本;
运行 SIYI FPV 应用,进入设置菜单,在地址设置菜单下选择“思翼相机1(IP地址为 192.168.144.25 时)”或“思翼相机 2(IP 地址为192.168.144.26时)”即可显示相机图传画面并通过地面站触摸屏控制云台姿态与功能;
MK32 手持地面站控制 A8 mini:
1)这种控制方法并不是通过RC配置,由飞控控制云台相机的运动和拍照!而是MK32天空端通过网线直接对云台相机进行控制,不经过飞控!!
2)运动:运行 SIYI FPV 应用时,在地面站触摸屏上左右滑动可以控制云台左右平移运动,上下滑动可以控制云台上下俯仰运动,云台运动方向与手指滑动方向一致。双击屏幕云台将自动回中。滑动后长按地面站屏幕云台会持续运动直到最大角度,长按的位置距离屏幕中心点越远,云台转动速度越快。
3)变倍:运行 SIYI FPV 应用时,在地面站触摸屏上按下“放大”或“缩小”图标即可实现变倍控制,A8 mini 云台相机最大可达 6 倍数字变倍。
4)拍照与录像:运行 SIYI FPV 应用时,在地面站触摸屏上按下“拍照”图标即可拍照。按下“录像”图标即可开始录像,按下“录像中”图标即可停止录像。注意,使用拍照与录像功能前需要将 SD / TF 卡装入云台相机。
参考文献:
Mk32 用户手册
A8 mini 用户手册
PC端查看视频流:
PC连接上MK32地面端的热点,用QGC或出图软件 EasyPlayer查看视频流。
详细请参考MK32用户手册:Mk32 用户手册
mavlink 控制云台和相机
控制《云台》的 mavlink command、massage
- use MAV_CMD_DO_MOUNT_CONTROL to set the gimbal’s mode (aka mount mode)
- use MAV_CMD_DO_GIMBAL_MANAGER_PITCHYAW to move to a desired angle or at a desired rate
- use MAV_CMD_DO_SET_ROI_LOCATION to point at a Location
- use MAV_CMD_DO_SET_ROI_NONE to stop point at a Location or vehicle
- use MAV_CMD_DO_SET_ROI_SYSID to point at another vehicle
GIMBAL_DEVICE_ATTITUDE_STATUS 云台当前的姿态信息,包括欧拉四元素、角速度
参考文献:Control a Gimbal / Camera Mount
控制《相机》的 mavlink command、massage
Control a Camera
Camera Control in Auto Missions
Camera Control in Auto Missions
Copter Mission Command List
Mission Commands pages
其他参考文献
A8 mini 用户手册
Mk32 用户手册
思翼科技官网
https://ardupilot.org/copter/docs/common-cameras-and-gimbals.html
https://ardupilot.org/copter/docs/common-siyi-zr10-gimbal.html
https://ardupilot.org/copter/docs/common-mount-targeting.html#common-mount-targeting
https://ardupilot.org/copter/docs/common-camera-control-and-auto-missions-in-mission-planner.html#common-camera-control-and-auto-missions-in-mission-planner
https://ardupilot.org/copter/docs/common-camera-controls.html
原文链接:https://blog.csdn.net/weixin_43321489/article/details/132624043

















 4733
4733

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









