






固定翼FPV飞行一直以来是很多玩家非常喜欢的项目,飞行距离远,体验真机驾驶的视觉乐趣。市场上也出了很多闭源的飞控,例如司南、切糕、Arkbird等等。开源的飞控平台也非常多,之前用F4V3固件刷INAV固件的教程也得到了非常多飞友的认可。最近在折腾给F4V3飞控刷ardupliot固件后飞固定翼,感觉飞行体验及调参逻辑要比过去的INAV固件要舒服很多。所以此次重点以新手的视角用F4V3飞控刷ardupilot固件来飞固定翼的详细步骤整理。按着步骤走,对飞控不熟悉的玩家也能完成看似复杂的调参。
设备选择: 固定翼载机,推荐主流选择:双发前拉动力的 大白鲨、肥翁、龙2(翼展110~120cm,起飞重量1200g~3000kg),单发尾推飞翼机型 ARWING、御猫、海豚、等小翼展(80~90cm)长续航便携机型。
遥控器:推荐选择基于OPENTX、EDGETX开源系统的遥控器(Jumper ,RadioMaster , Frsky,黑羊tango等),增程高频头及接收机选择 思翼SIYI FM30+FR接收机,开源的ELRS 2.4G/915Mhz的高频头和接收机(目前已经基本鲜有玩家使用433Mhz的增程系统)
5.8G模拟图传:5.8G模拟图传及摄像头选择完全看玩家选择,模拟图传可考虑 贝壳BAYCK 酷爱EH1、Caddx 平头哥2代,Foxxer无牙崽2代、。图传发射可选就多了,熊猫5804系列,奈斯大功率系列,TANK RUSH大功率等等。而且图传距离效果与飞行环境以及高度,图传接受屏幕的灵敏度,接收天线增益等因素,都有很大关系,本人用渣渣600mw的山寨图传,都飞出12km直线距离,高度1000m的画面有些雪花。
高清数字图传:考虑使用DJI高清数字图传(需搭配大疆高清眼镜V1/V2),原厂天空端2天线带1080p卡录(使用非DJI原厂摄像头只能720P卡录),有效距离远。Vista天空端体积小单天线,有效距离大约7~8km。搭配的天空端摄像头有原厂摄像头(视角窄,白天色彩好,高帧率),caddx极光pro摄像头(夜视效果好,色彩艳丽),星云Pro,Runcam 凤凰HD。大疆高清目前没人飞出超过13.3Km,据说是DJI在底部程序代码的限制。
动力电池:根据不同载机及不同玩家的经验,推荐使用4~6S 18650/21700 多组并联的电池,容量大,放电倍率足够固定翼FPV使用,保养方便。
双发固定翼推荐:
载机:大白鲨空机/肥翁空机/龙2
电机:4S动力推荐使用 2207/2306-1450KV电机,6S重载动力推荐使用2216-980KV电机
电调:4S动力好赢乐天20A,6S重载动力推荐使用好盈40A
舵机:PTK 7452 9克数码舵机 4个。
飞控: F4V3 飞控
GPS模块:BN280 北田280(固定翼不需要带罗盘)或者其他GPS模块(价格20~100不等)
电池:4S 2~3P 21700 9000~13500ma,6S 2P 21700 9000ma
螺旋桨:4S 动力使用7040 3叶正反桨 ,6S重载动力使用8060正反桨
单发尾推飞翼布局推荐:
载机:ARWING空机/海豚空机/御猫空机
电机:2207/2306-1950KV电机 御猫推荐使用2806-1700KV
电调:飞盈佳乐35A
舵机:PTK 7452 9克数码舵机 2个。
飞控: F4V3 飞控
GPS模块:BN280 北田280(固定翼不需要带罗盘)或者其他GPS模块(价格20~100不等)
电池:4S 21700 4500ma /4S 2P 18650 6000ma
螺旋桨:51466穿越机桨,御猫推荐使用8*6桨
前期准备:
windows10操作系统的电脑一台,安装有Betaflight软件或者INAV调参软件,MissionPlanner调参软件。飞控固件,一般命名都是:arduplane_with_bl.hex (飞控需要刷带bl的固件做引导),Micro USB数据线一条。
第一节:飞控前期准备
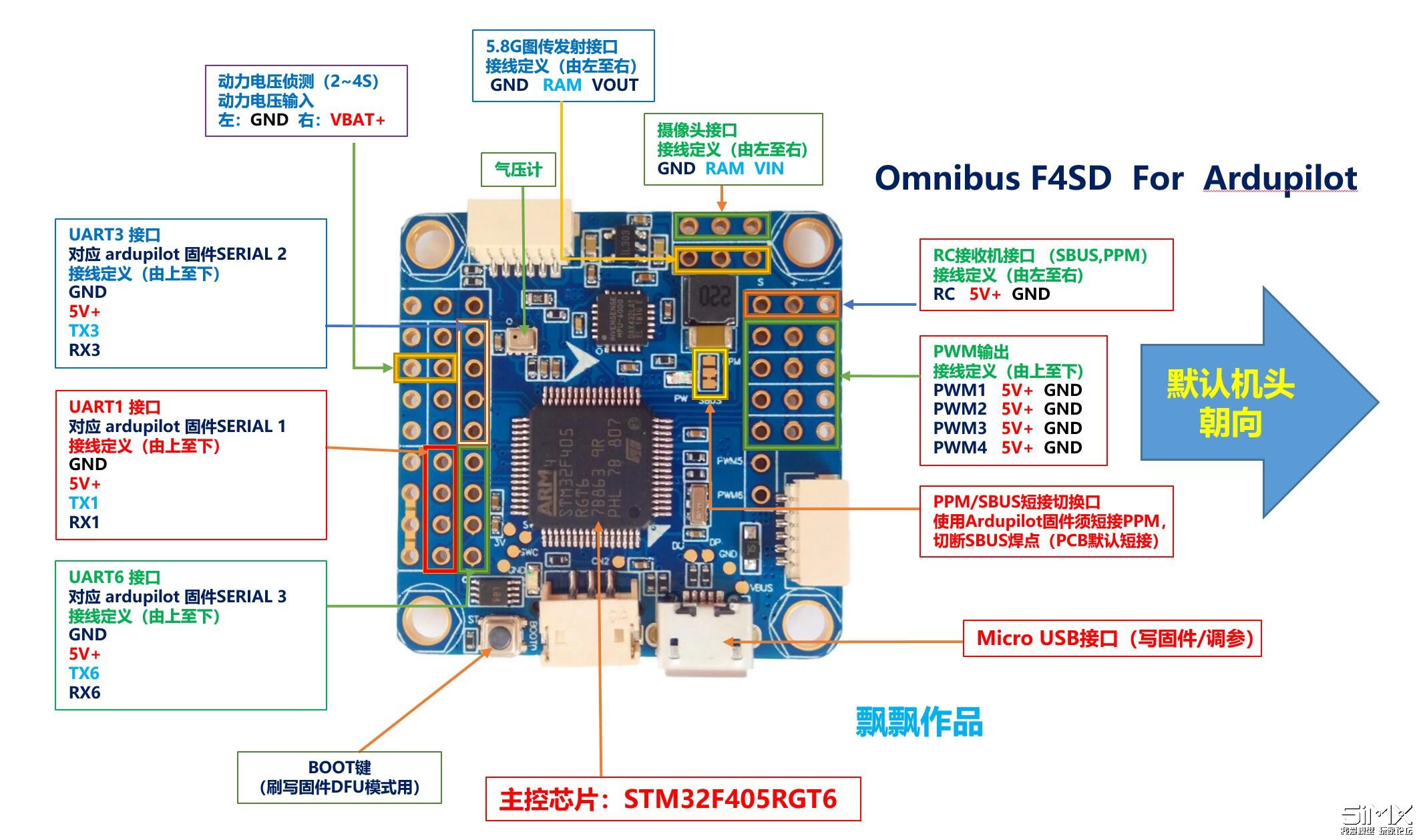
1、 F4V3飞控,官方指导命名为omnibus F4Pro或者ominibus F4SD。
2、飞控标配 PWM1~6个端口控制输出,其中PWM1~4可以直接焊接插针后直接插舵机及电调信号线。PWM5~6只在板上预留S信号点。飞固定翼建议把PWM 1~4焊上2.54排针,方便后面接舵机及电调。PWM1~4排针中间的5V不与飞控自身的5V供电不连通,所以需要从分电板接一路5V供电到PWM输出接口的5V处,确保舵机供电正常。
3、飞控标配 UART1,UART3,UART6 一共3个串口,其中UART6端口与飞控SBUS接收机排针连通。ardupilot固件在接收机识别上能自动识别PPM、SBUS接收机,所以需要断开飞控上SBUS焊点,短接PPM焊点(很多F4V3飞控在做PCB板 的时候就直接把SBUS焊点连通,需要用美工刀划断PCB上两个点的连接。部分F4V3飞控在实际使用过程中出现就算划断SBUS接口,仍然出现RC接口与UART6接口冲突,导致UART6接口无法另外接其他设备,例如数传,大疆高清图传,黑羊接收机等)
4、飞控的UART1,UART3接口可以焊接2.54排针,方便后期接其他设备。
5、飞控的5.8G模拟图传及摄像头供电容易受主板自身接动力电压波动影响,建议从分电板接一路12V供电到图传及摄像头供电正负极处(5V供电的图传和摄像头请接5V供电)。
6、飞控需要从分电板接一路动力电正负极信号到飞控的VBAT和GND,确保飞控能侦测到动力电压及使用内部的BEC5V线路给飞控供电以及接收机、GPS供电。
20220305补充:
焊接排针注意:F4V3飞控的TX6和RX6焊点,与飞控背面的TF卡槽外壳距离非常近,部分模友自己焊排针时候,容易造成与TF卡槽外壳连锡造成端口无法使用。出现此类情况,建议玩家直接将TF卡槽外壳撬掉。这样放弃使用TF作为飞行日志记录的作用。有得必有失。自己衡量吧。
我的常规串口外设:思翼FR接收机+数传,GPS,大疆高清天空端。所以习惯使用连接的对应端口为:
思翼接收机SBUS,正常接SBUS口
思翼数传,接UART3口(确保禁用I2C),对应SERIAL2
SERIAL2_BAUD 57
SERIAL2_OPTIONS 0
SERIAL2_PROTOCOL 2
GPS模块,接UART6口,对应SERIAL3
SERIAL3_BAUD 38
SERIAL3_OPTIONS 0
SERIAL3_PROTOCOL 5
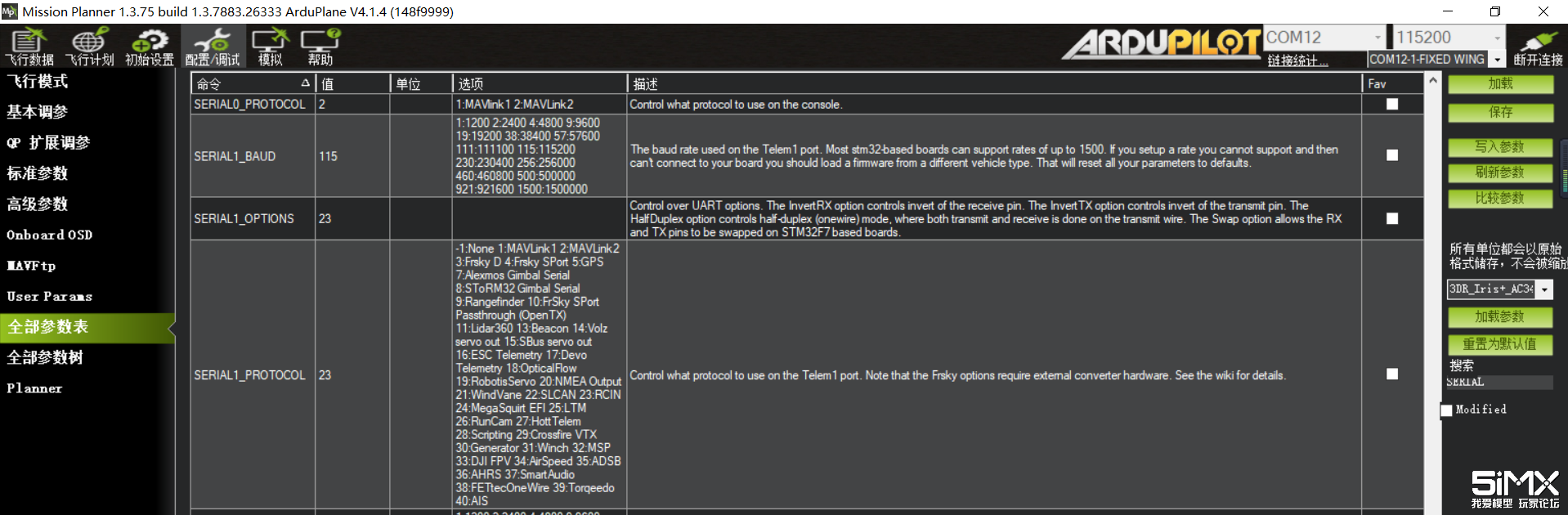
大疆高清天空端,接UART1,对应SERIAL1
SERIAL1_BAUD 115
SERIAL1_OPTIONS 0
SERIAL1_PROTOCOL 33 (使用caddx阿凡达高清天空端 displayport 设置为42)20221111补充更新
OSD_TYPE 3 (使用caddx阿凡达高清天空端 displayport 设置为5)20221111补充更新
飞控具体接线图如下:
第二节:固件刷写
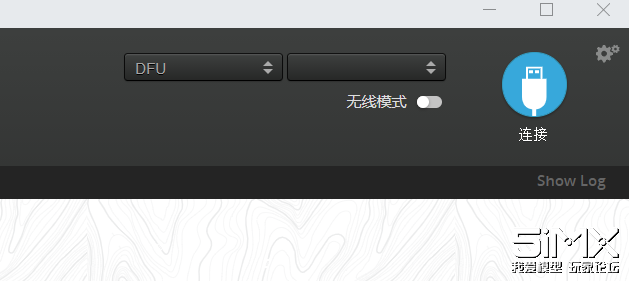
1、F4V3飞控刷写ardupilot固件,需要借助Betaflight调参软件或者INAV调参软件,本教程使用INAV软件作为演示,软件版本不限。按住飞控的BOOT键不放,使用Micro USB数据线把飞控与电脑连接,此时飞控LED指示灯长亮。INAV右上角显示DFU,即进入工程模式。如下图:
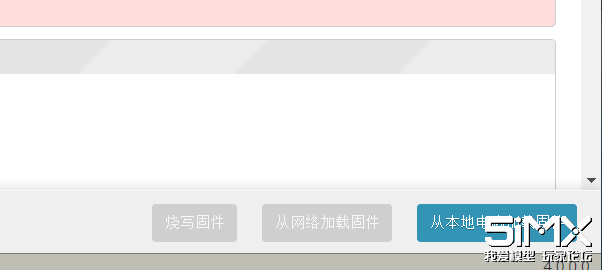
2:选择INAV左边的“更新固件”如下图:

选择“本地加载固件”如下图:
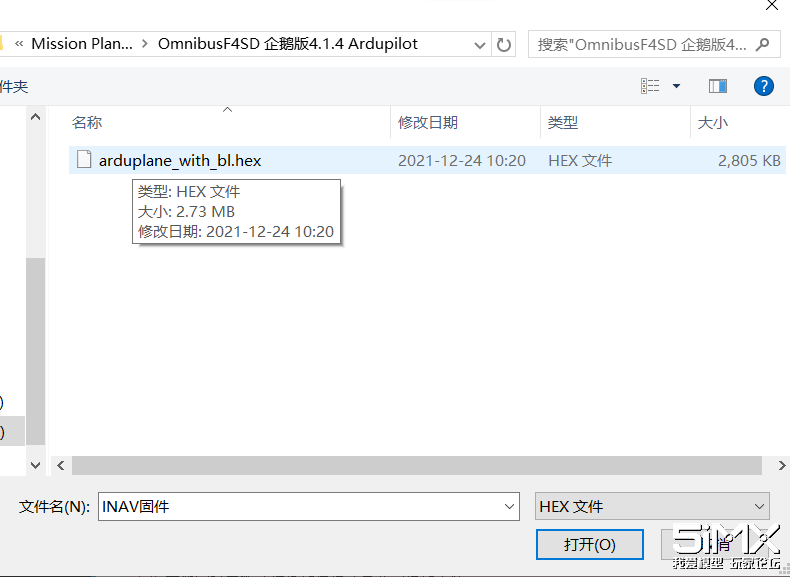
在弹出的对话框中找到飞控固件arduplane_with_bl.hex 存放的位置,点击“打开”如下图:
固件加载完成,即将准备烧写,点击“烧写固件”如下图:

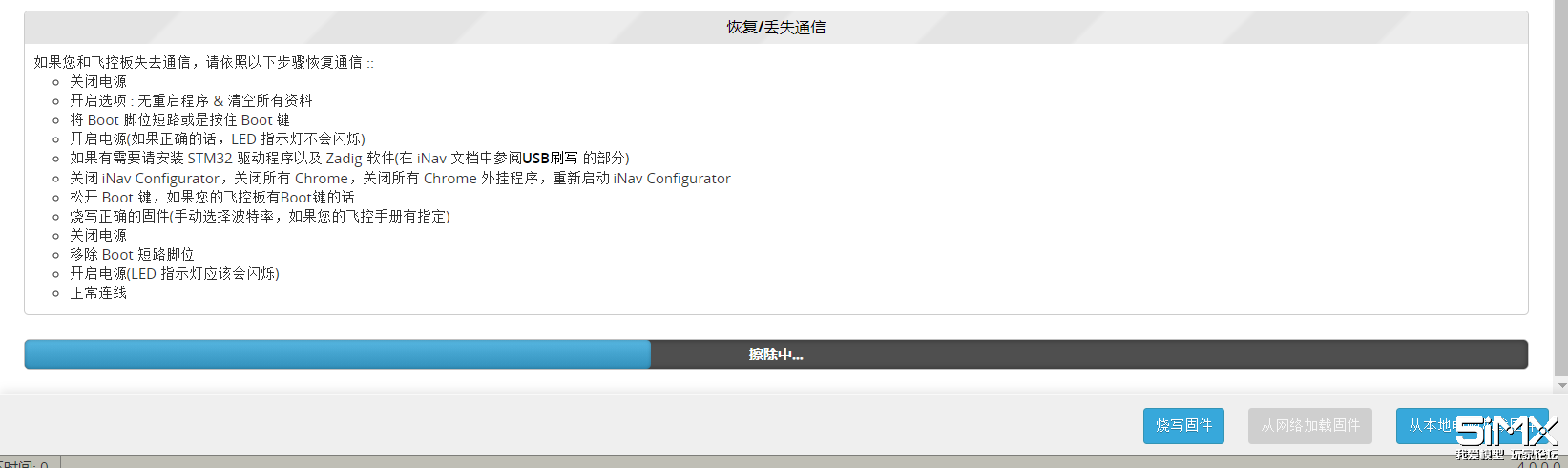
固件烧录过程,经过“擦除原固件”“烧录固件”“验证”最后显示“烧录成功”



3:此时,飞控已经成功刷入ardupilot固件,拔掉USB数据线,关闭INAV。打开MissionPlanner调参软件。
注:刷写固件时,建议断开所有与UART端口连接的设备,例如GPS,数传、接收机等。以免造成刷写冲突。
第三节:调参初步设置:
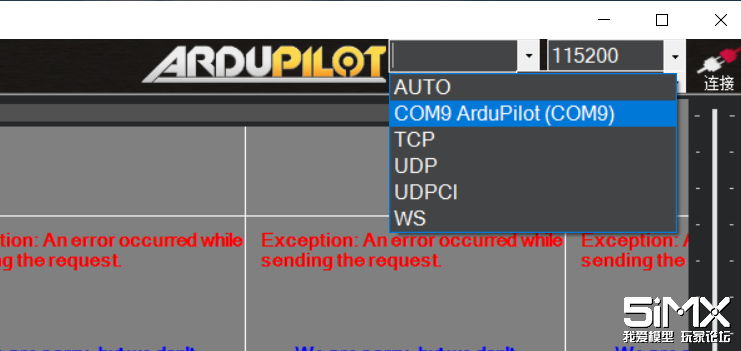
1:打开MissionPlanner调参软件。使用Micro USB数据线把飞控与电脑连接,在MP软件右上角选择飞控对应的端口(连接成功,端口显示突出Ardupilot),如下图:
点击连接,稍等几秒,软件在读取飞控的数据。
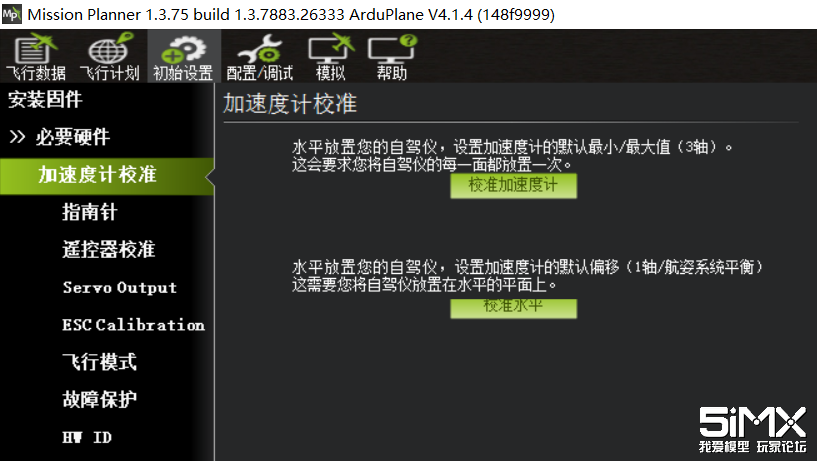
2:进行加速度计校准。点击开始,根据软件提示,翻转飞控的六面,点击“校准加速度计”,依据提示对飞控的6个面进行校准。如下图:
Please place vehicle LEVEL 加速计校准--底面朝下
Please place vehicle LEFT 加速计校准--左面朝下
Please place vehicle RIGHT 加速计校准--右面朝下
Please place vehicle NOSEDOWN 加速计校准--前面朝下
Please place vehicle NOSEUP 加速计校准--后面朝下
Please place vehicle BACK 加速计校准--顶面朝下
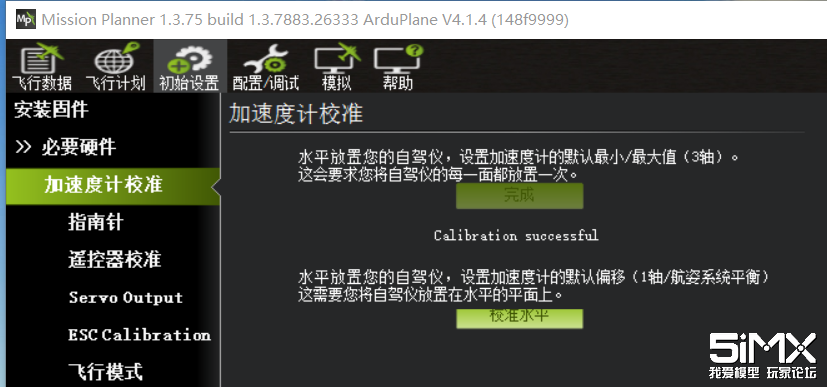
校准完成,如下图:
校准水平,可以在飞控装机后,飞机平放,然后执行一次校准水平即可。
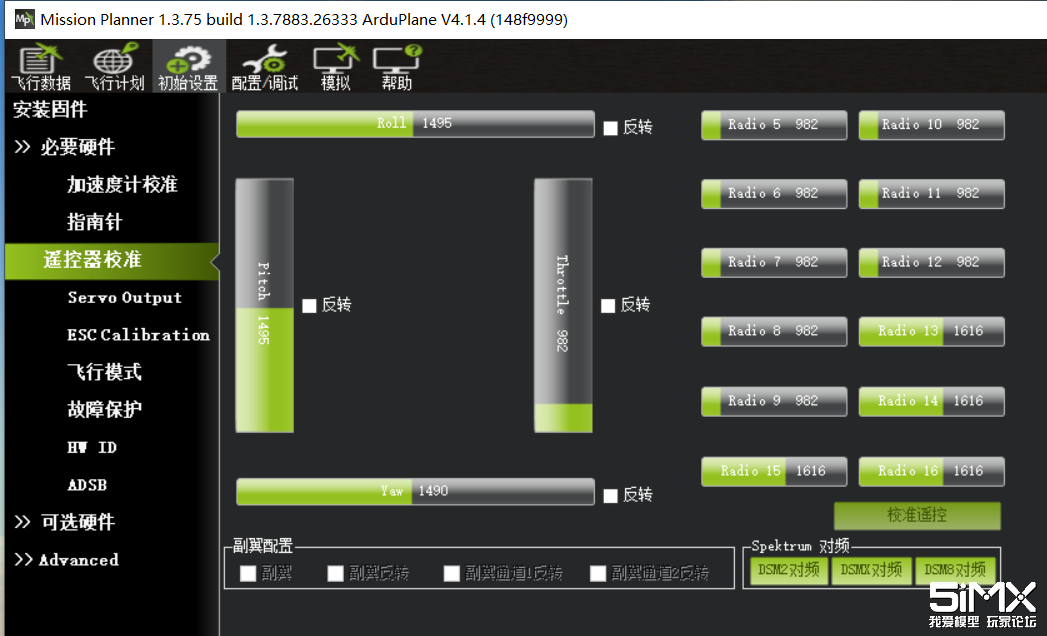
3:遥控器校准
此时需要接收机与飞控正常连接,飞控有USB线连接电脑的话,接收机是有5V供电,所以此时可以不需要连接动力电池。
接收机与飞控正常连接并设置正确,在“初始设置”--“遥控器校准”页面,所有通道均有一定的值。特别是油门通道,以及开关通道。如下图:
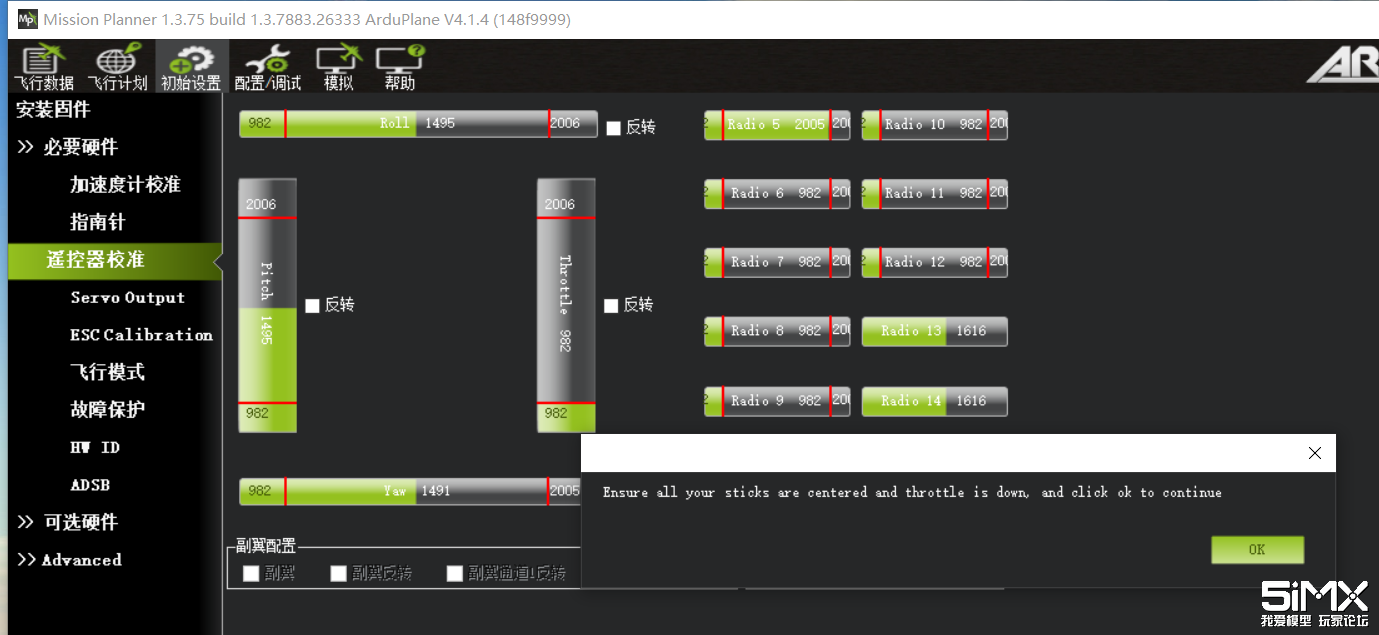
如果接收机设置不正确,油门通道与开关通道均无输出值。点击“校准遥控”弹出对话框”Ensure your transmitter is on and receiver is powered and connected。Ensure your motor does not have power/no props!!!”旨在提示请确认遥控器油门通道的方向,以及确保电机未接电及未安装螺旋桨。点击OK。如下图:

弹出对话框“Click OK and move all RC sticks and switches to their extreme positions so the red bars hit the limite”旨在提示点击该OK栏后,注意将所有通道的摇杆打满,开关通道及6端开关通道打满,确保看到通道显示红色栏为通道输出的最大值及最小值。 点击OK。如下图:

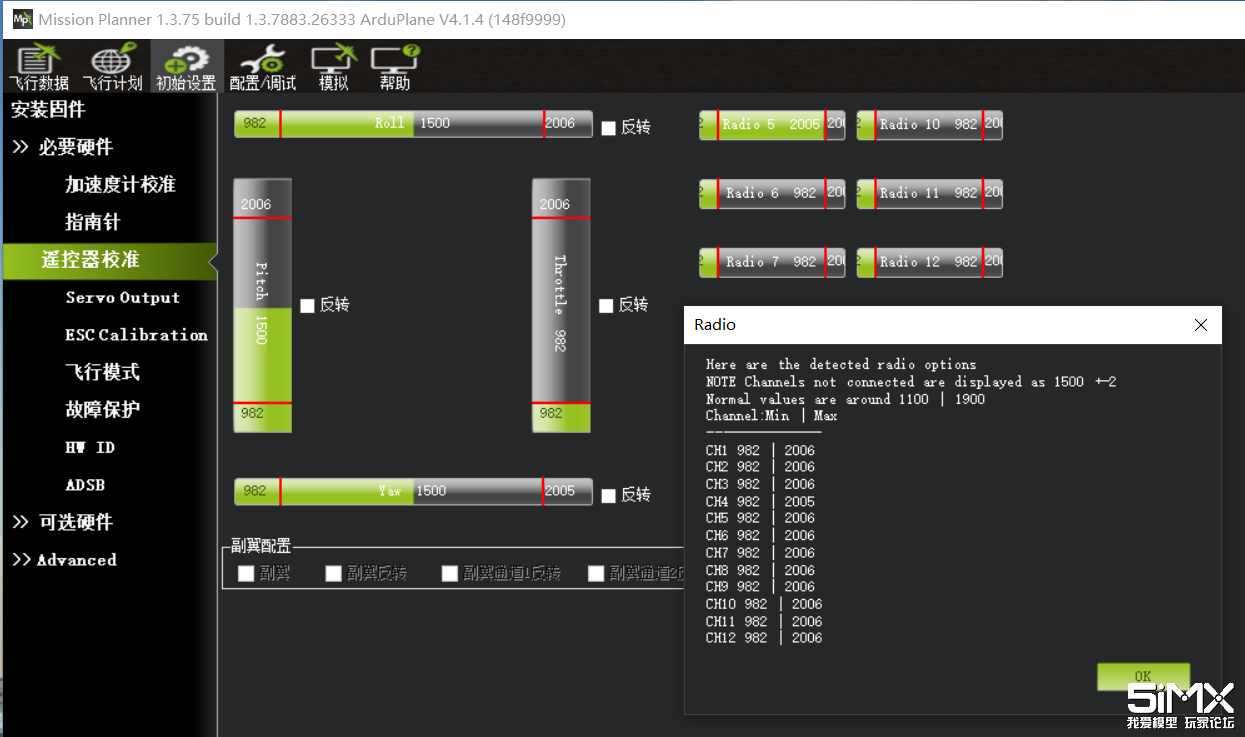
此时将所有通道的摇杆打满,开关通道及6端开关通道打满,可以在画面中开到通道是输出最大值和最小值有红色栏进行圈定,点击OK。如下图:
点击OK后,弹出对话框,显示各个通道输入的最大值与最小值,点击OK。如下图:
此时完成遥控器校准。
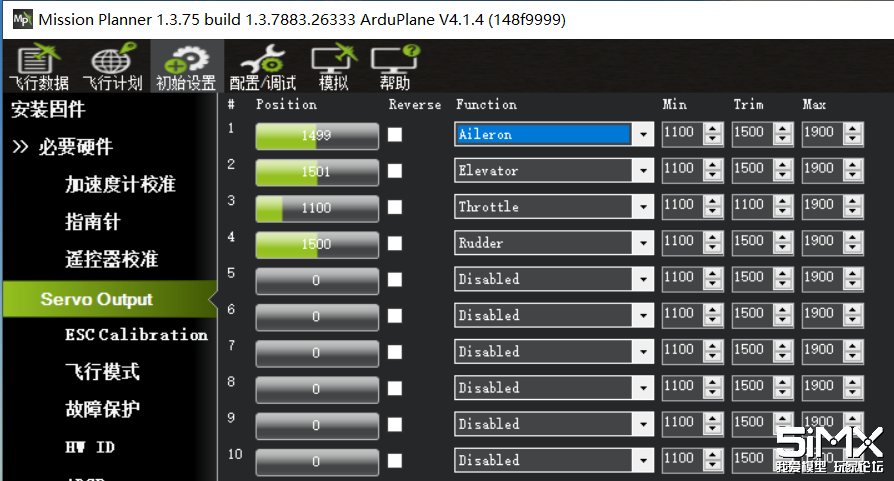
4:定义PWM通道输出
飞翼模式,如下图:(PWM1通道禁用)
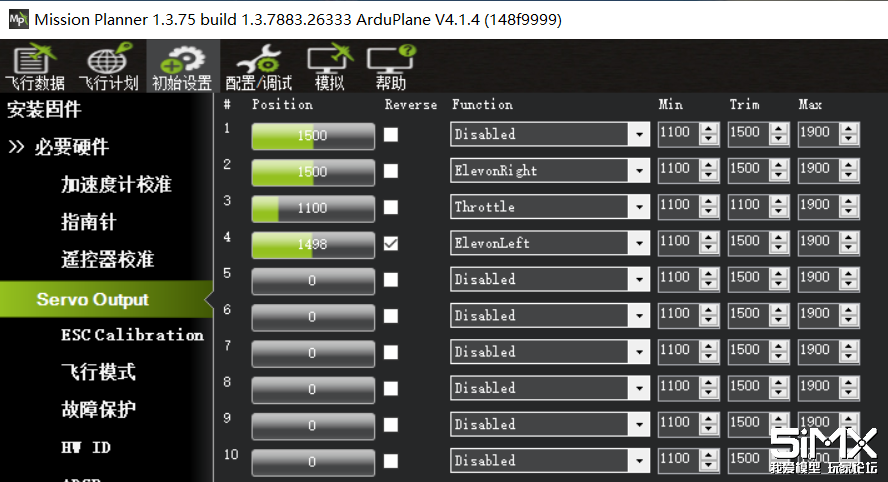
传统布局模式,如下图:
V尾布局模式,如下图:

ardupilot固件的通道输出为实时输出,后期进行通道辅助修正调整的时候,发现飞控执行飞机姿态修正的时候,通道输出方向错误,在对应通道的"Reverse"处勾选,对应通道的输出即可反向。通道辅助检查请在FBWA增稳模式下操作。
5:设置飞控的飞行模式
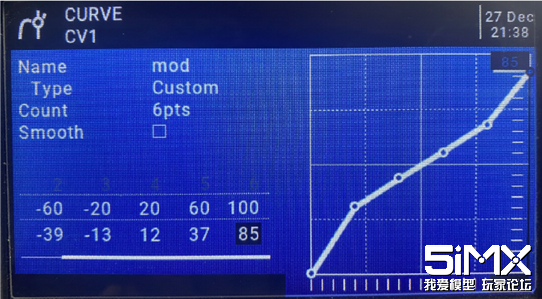
ardupilot使用1个比例通道进行6个模式切换,目前市场上有遥控原带6段开关(例如Jumper T16,T18,T Pro,Radiomaster T18S),不过这个六段开关的输出范围与ardupilot的6个模式的范围区间不太一致,建议在遥控的6段比例通道中加入一个曲线,参数为:
opentx 6段开关曲线设置
-100 -60 -20 20 60 100
-85 -45 -15 15 45 85
如下图:
部分遥控没有6段开关(如Frsky X9D, Jumper Tlite,radiomaster TX12,Zorro)20221111补充更新 推荐使用3段开关对应控制3个常用飞行模式,再使用数个2/3段开关作为独立模式激活功能
Ardupilot的模式切换确认逻辑为以最后一次模式切入为确认。
独立通道开关切换模式(飞控识别最后一次模式切入操作为准)
使用举例:
我们使用遥控的8通道(飞控默认)3段开关作为模式切换,在设置的时候需要对照选择开关段位对应的模式位置
分别选择:FBWA增稳模式,CRUISE定高定向模式,LOTIER定点留待模式
使用遥控5通道的2段开关作为TAKEOFF抛飞模式开关
全部参数表中查找 RC5_OPTION 选择 77
使用遥控6通道的2段开关作为RTL返航模式开关
全部参数表中查找 RC6_OPTION 选择 4
使用遥控7通道3段开关作为AUTO航点模式开关
全部参数表中查找 RC7_OPTION 选择 16
以下是常见独立开关控制模式对应的参数
4:ModeRTL 返航模式
16:ModeAuto 航点模式
41:ArmDisarm (4.1 and lower) 开关一键解锁(4.2版本固件前)
51:ModeManual 手动模式
56:ModeLoiter 定点留待模式
58:Clear Waypoints 航点清除
72:ModeCircle 盘旋模式
77:ModeTakeoff 抛飞模式
92:FBWA 增稳模式
150:CRUISE 定高定向模式
153:ArmDisarm (4.2 and higher) 开关一键解锁(4.2版本固件起)
先熟悉一下各种模式的特点:
MANUAL 手动模式,完全脱离飞控参与
CIRCLE 盘旋模式
STABILIZE 自稳模式。简单的自稳模式,只会控制飞机回中,保持水平,可以用遥控控制姿态。如果觉得FBWA模式动作太过迟缓可以开启这个模式。
FBWA 增稳模式。根据设置倾角和俯仰角,并很好的保持姿态,高度通过油门控制,推荐新手使用的模式。
FBWB 增稳定高模式。在FBWA基础上会很好的保持高度。
CRUISE 巡航模式。定高定向飞行(远航强烈推荐使用)
AUTOTUNE 自动调参模式
AUTO 自动航点模式
LOITER 留待模式。即在当前定位点上空以设置的高度和半径绕圈等待。
RTL 返航模式。自动直线返航到家的位置上空以设置的高度和半径盘旋
TAKEOFF 辅助抛飞模式
根据下拉菜单选择对应的6个模式,最后点击“保存模式”即可。如下图:
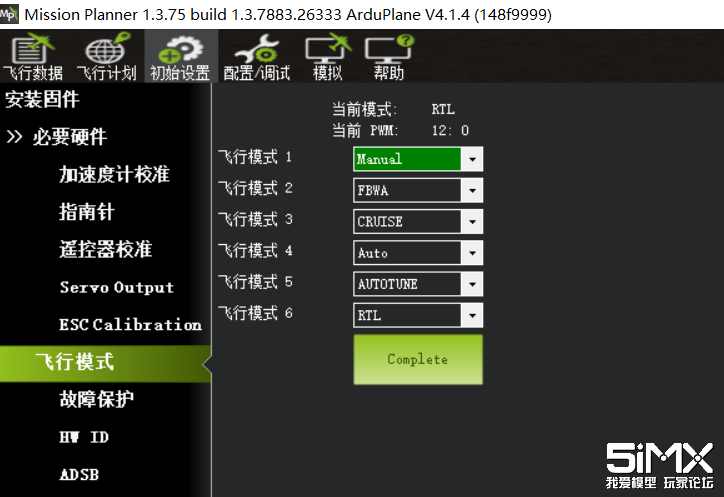
设置6个模式切换,即可在遥控的6段开关选择查看MP调参软件的显示(模式切换,在OSD上的模式显示也会提示)
设置模式切换通道,固件默认为第5通道。本人喜欢使用12通道作为模式切换通道,所以在当前PWM:12 修改模式切换的通道,在下文会有指导说明。
20220305补充:通过与本地大神交流,六段模式顺序,推荐设置为:
RTL,FBWA,CRUISE,AUTO,LOITER,MANUAL
6: OSD设置(模拟图传,DJI高清不在此)
进入OSD信息设置: 配置/调试--Onboard OSD--Screen1
ardupilot的OSD显示设置与INAV调参有些类似(F4V3飞控内置OSD模块),属于最下面的OSD内容选项中勾选需要显示的项目,在页面中拖动到自己想 要的位置即可。飞控通电并接入图传与摄像头时,拖动OSD项目的位置,点击右上角“Write customization”,即可在接受屏幕中看到OSD信息的更新。
如下图所示:
默认OSD设置
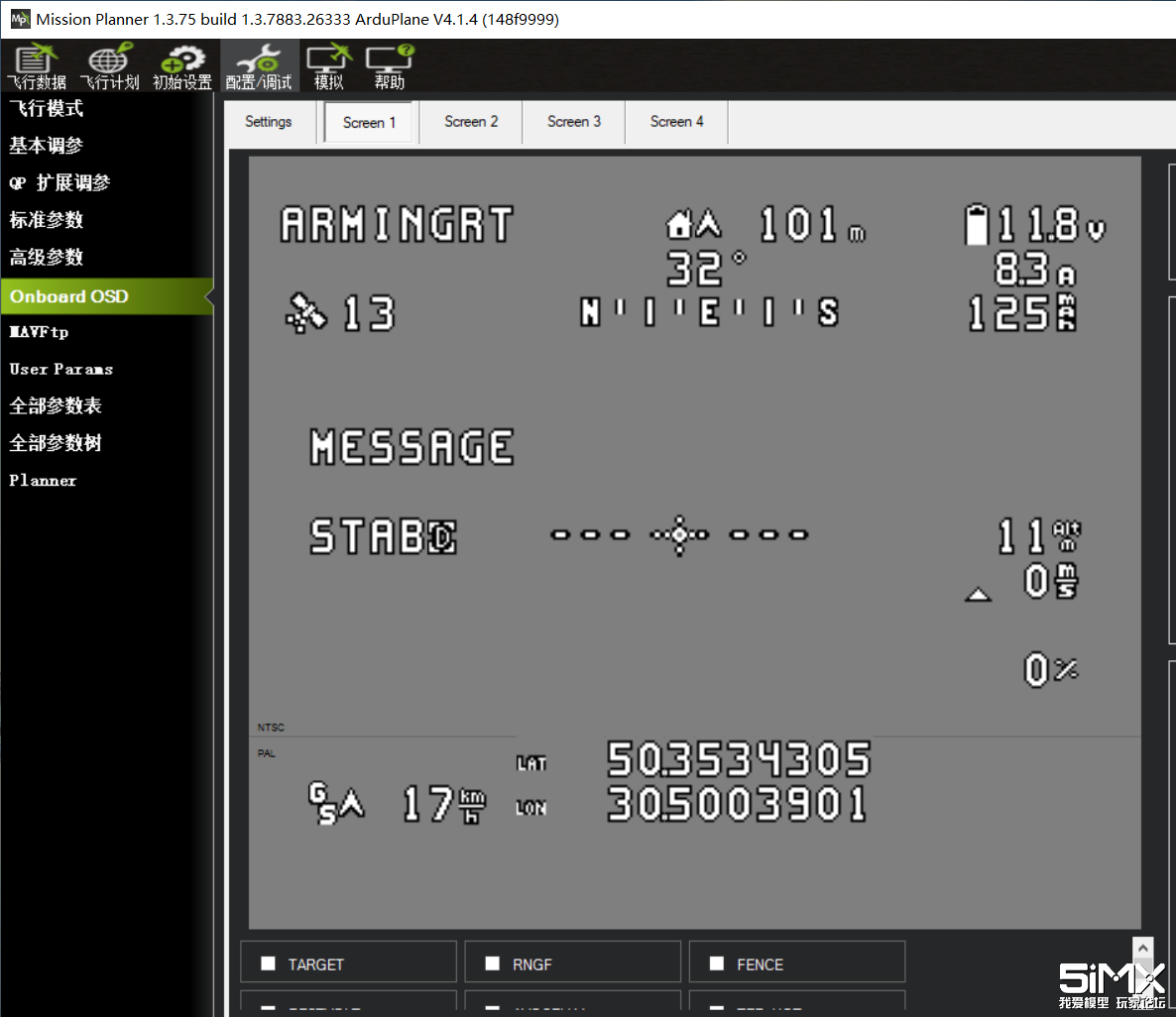
根据自己的需要调整,如图所示:
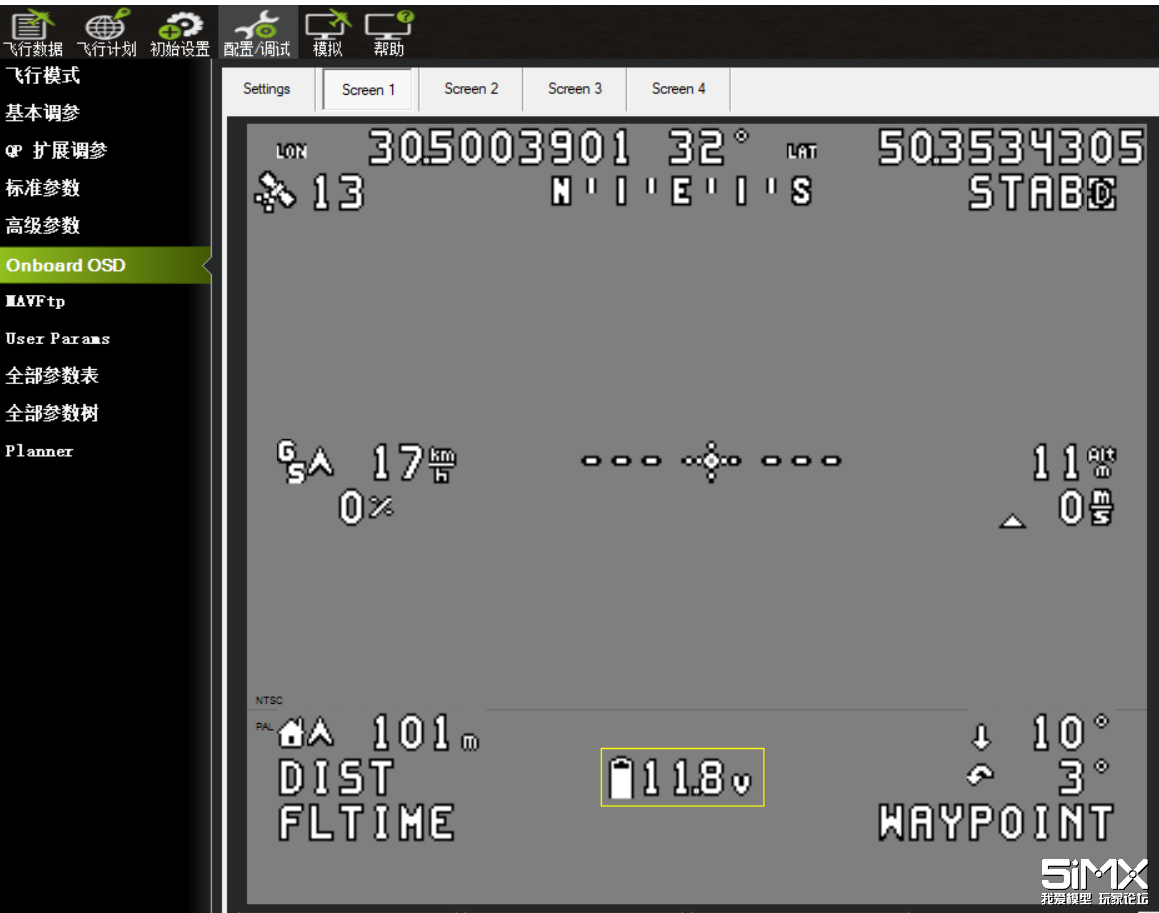
常用OSD内容对照:(20220905更新) BAT_VOLT 电池电压
CELLVOLT 单节电池电压
CURRENT 电流 (F4V3飞控无电流计,不设置)
POWER 当前系统功率 (F4V3飞控无电流计,不设置)
BATUSED 电量消耗 (F4V3飞控无电流计,不设置)
RSSI 遥控信号强度
SATS GPS卫星数
FLTMODE 当前模式 (DJI不支持显示)
MESSAGE 系统信息 (DJI显示飞行模式)
HORIZON 模拟地平线 (DJI不支持显示)
HOME 离家距离 (DJI不支持显示)
DIST 飞行航程 (DJI不支持显示)
HOMEDIR (DJI显示指向家箭头)
HOMEDIST (DJI显示离家距离)
CRSSHAIR (DJI显示中心十字瞄准)
SIDEBARS (DJI显示战机模式侧边栏)
HEADING 离家方位角 (DJI不支持显示)
THROTTLE 当前油门值 (DJI不支持显示)
COMPASS 罗盘方位 (DJI不支持显示)
GPSLAT GPS纬度
GPSLONG GPS经度
ROLL 横滚值
PITCH 俯仰值
ALTITUDE 当前高度
GSPEED 当前地速
VSPEED 当前高度变化值 m/S
7:电调油门行程校准
装机后需要对电调进行连接飞控状态的油门行程校准操作。油门校准须确保卸除螺旋桨,保证电机工作是无磕碰到周边物体。
具体操作:
将飞控通过USB线连接电脑,打开MP调参软件,连接飞控。
在“飞行数据“---”动作”---点击“解锁/锁定”--遥控油门推到最高--电调 连接动力电池--等待电调检测电池123声音(不同的电调声音有可能不同)--油门拉到最低--电调确认油门最低值 滴一声长响。此时完成油门行程校准操作。
第四节,进阶调参(重要)
其他参数更多是在“全部参数表”里面进行针对性设置,这是ardupilot固件最具有特点地方。“全部参数表”内容密集,如下图:
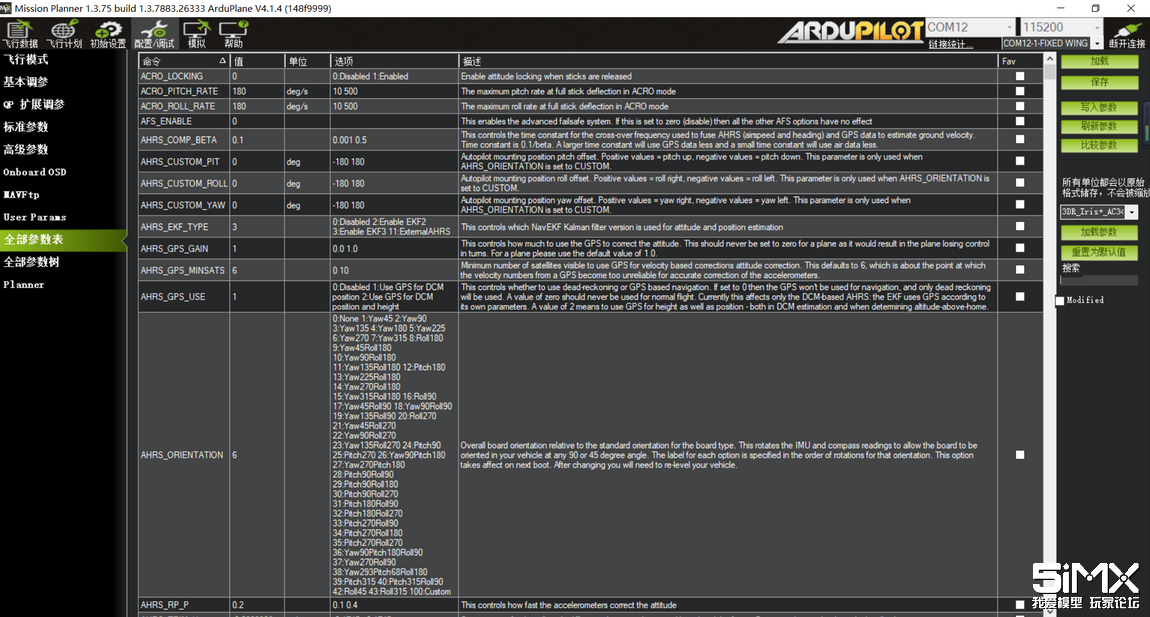
部分安装了MissionPlanner调参软件的用户在软件界面中找不到“全部参数表”“全部参数树”项目,可以在“配置/调试”页面下的“Planner”页面下的“布局”项目,选择“Advanecd”,然后保存,关闭软件,重新打开并连接飞控,即可找到“全部参数表”“全部参数树”项目页。

一般玩家都会直接在右边的“搜索”栏里输入命令关键字,这样能提高找到命令的速度。一般情况我会搜索前3个字母,这样能更好的提高调参速度。
每一项命令,第一列为命令名称,第二列为值,第三列为单位,第四列为选项,第五列为描述。我们会搜索命令,然后鼠标点击对应的值的数字,输入我们需要设置的值。部分命令会弹出对话框,关闭或者忽略即可。命令的值修改完成,点击右边“写入参数”,弹出“Parameters successfully saved”对话框,点击OK即可。此时你要修改的命令的值已经完成更新。
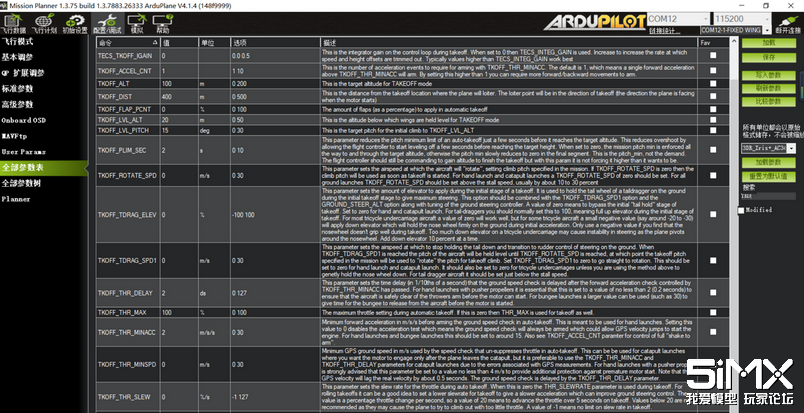
1, TAKEOFF模式设置
(打开抛飞辅助模式,地面解锁,推油门不转,将飞机抛出后有一定速度后电机会快速启动并按照指定油门值爬升)
RC6_OPTION 77 (设置6通道开关为TAKEOFF起飞模式开关,搜索RC6)
全部参数表,搜索TK 进入takeoff模式设置
TKOFF_ALT 100 (设置起飞模式到达指定高度100米)
TKOFF_DIST 400 (设置起飞模式最大范围 400米)
TKOFF_THR_MAX 100 (设置起飞模式最大油门值100%)
TKOFF_THR_MINACC 2 (起飞模式飞控检测飞机瞬间速度达到2米/秒,油门输出)
TAKEOFF模式必须在有GPS定位完成后才能启用。
2,习惯使用飞控的UART3端口连接飞控,F4V3的UART3端口自带I2C用来连接罗盘,固定翼不需要连接罗盘,所以我们需要用一个命令禁用。
BRD_ALT_CONFIG 1 (搜索BRD)
这样解决F4V3 UART3端口开放 (外部I2C禁用)
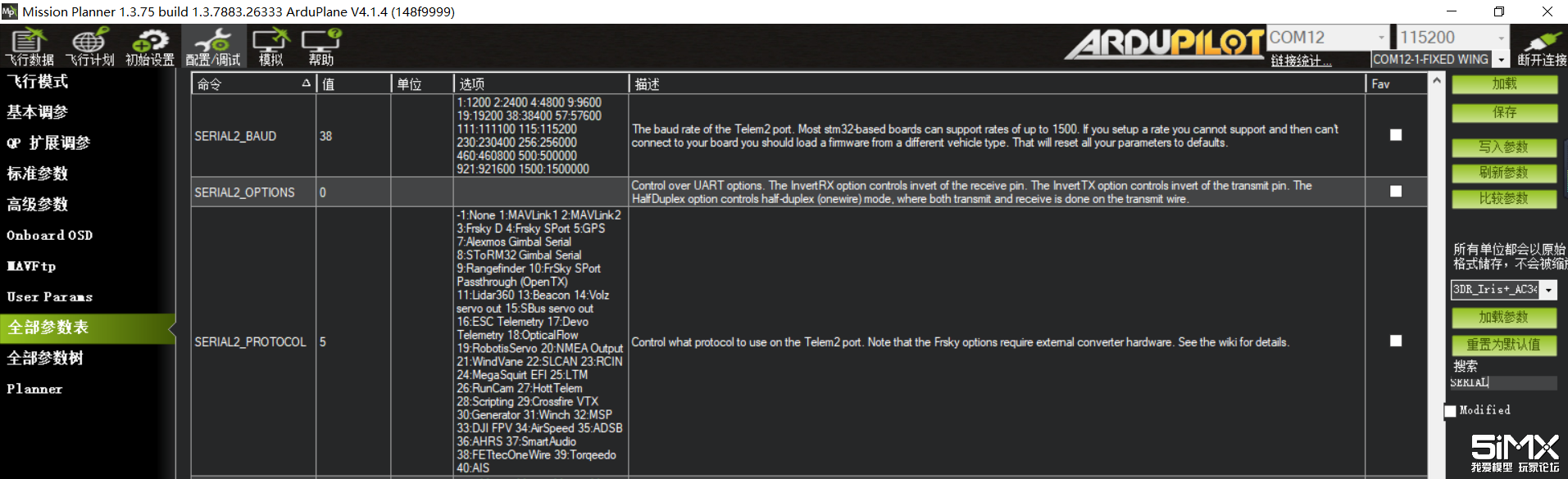
对应为 SERIAL 2,我们需要设置该端口连接GPS模块。对应端口设置如下图:(搜索SERIAL2)
SERIAL2_BAND 38
设置串口2波特率为38400(GPS用)
SERIAL2_PROTOCOL 5
设置串口2为GPS端口 如下图:
将GPS模块与飞控UART3端口连接,4根线
GPS V---飞控 5V
GPS G---飞控 GND
GPS R----飞控 TX3
GPS T----飞控 RX3
GPS模块连接错误或者设置错误,在“飞行数据”页面,可以看到“无GPS”,如下图:

GPS模块连接正确并设置正确,在“飞行数据”页面,可以看到“GPS未定位”,如下图:

3,修改飞控安装方向
F4V3飞控在默认时,USB口处于机头方向右侧,这样我们在将飞控装入机舱后,USB线不方便连接USB口进行调参,所以我们需要把飞控的USB口修改方向朝机头方向,便于连接USB线调参。(搜索AHRS)
AHRS_ORIENTATION 6
修改飞控安装方向顺时针旋转270°,USB口朝机头方向
4:修改飞行模式切换通道 (搜索FLTMODE)
FLTMODE_CH 12
选择12通道作为模式切换通道(将12通道设置位6端模式开关)
5: 解锁自检
ardupilot固件对飞控解锁要求非常高,默认参数需要自检数十项参数后达标才允许解锁,非常麻烦。(搜索ARMING)
ARMING_CHECK 0 (此处会弹出对话框,关闭即可)
解锁自检,忽略所有要求。用户可以在油门最低,Yaw方向舵右打满6秒后,飞控解锁,推油门电机转。
设置参数 ARMING_RUDDER 2 飞机落地后,Yaw方向舵左打满6秒,飞控锁定,此时推油门电机不转。
6:接收机设置
如果使用SBUS接收机,可以接在RC口,飞控默认UART6端口(SERIAL3)参数为:
SERIAL3_BAUD 57
SERIAL3_OPTIONS 0
SERIAL3_PROTOCOL 1
多数SBUS接收机均可按照此方式连接(含思翼FR接收机)
若使用ELRS接收机连接飞控,由于部分F4V3飞控在切断SBUS焊点后RC口仍无法解除与UART6端口的冲突,所以我们需要使用UART1端口连接ELRS接收机
如下图:(搜索SERIAL1)
SERIAL1_BAUDRTE 115 (设置端口波特率为11500)
SERIAL1_OPTIONS 0
SERIAL1_PROTOCOL 23 (设置UART1口为RCIN)
使用黑羊CRSF接收机,则可以设置为:
SERIAL1_BAUDRTE 115 (设置端口波特率为11500)
SERIAL1_OPTIONS 0
SERIAL1_PROTOCOL 23 (设置UART1口为RCIN)
RC_PROTOCOL 9 (设置RC输入模式为CRSF ,搜索RC_PRO)
RSSI_TYPE 3 (RSSI取值模式 ELRS取LQ值,搜索RSSI)
这样我们就可以使用ELRS接收机或者黑羊CRSF接收机 连接飞控UART1端口
接收机 V---飞控 5V
接收机 G---飞控 GND
接收机 R----飞控 TX1
接收机 T----飞控 RX1
使用ESRS接收机,建议使用12通道作为模式切换通道。
FLTMODE_CH 12
使用黑羊CRSF接收机,则可以任意使用空余通道作为模式切换通道,ardupilot默认为8通道
7, 失控保护检查(重要)
ardupilot固件的失控保护逻辑,为飞控未检测到接收机给飞控输出的油门值低于1000,飞控则执行失控保护动作(熟悉inav或者bf的玩家应该清楚,遥控未与接收机连接,或者飞控未检测到接收机,油门值会固定在885)部分版本的固件在失控保护比较保守,所以建议用户执行一次失控保护检查。如下图:(搜索FS)
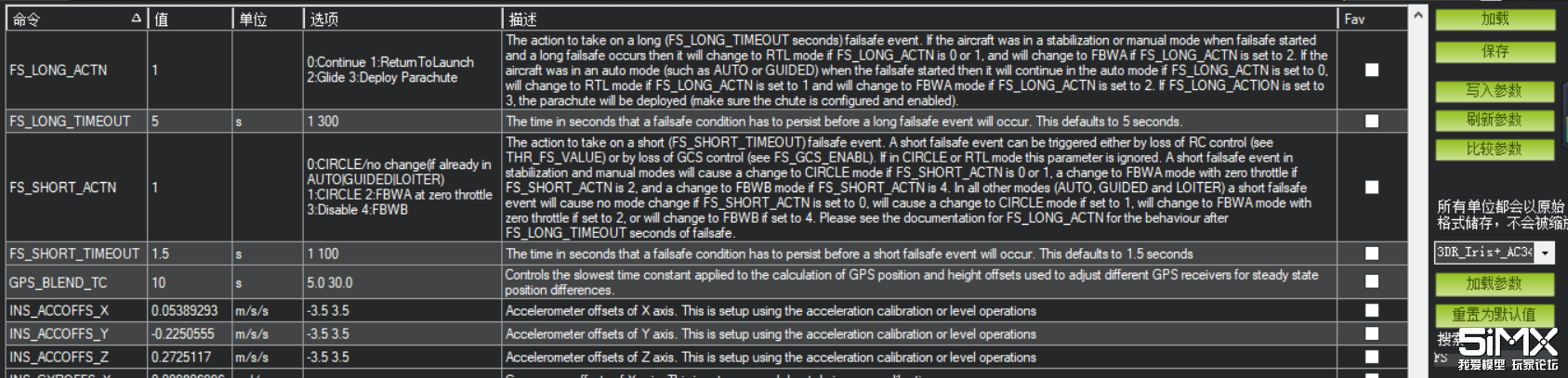
FS_SHORT_TIMEOUT 1.5 (失去接收机油门输出信号1.5秒后,飞控执行第一阶段失控保护动作)
FS_SHORT_ACTN 1 (第一阶段失控保护动作,执行CIRCLE盘旋等待。默认为0“不执行任何动作”)
FS_LONG_TIMEOUT 5 (执行第一阶段失控保护动作5秒内,没有接受到油门输出信号,飞控执行第二阶段失控保护动作)
FS_LONG_ACTH 1 (第二阶段失控保护动作,执行RTH返航。默认为0“执行当前动作”)
8:OSD电压显示修正
F4V3飞控刷ardupilot固件后,需要对部分参数修改,确保OSD显示的电池电压正常。具体如下(搜索BATT):
第一步,搜索: BATT_MONITOR,把这项修改为 4 , 写入参数。
断开飞控连接,重新连接USB线,
第二步,连接MP软件,找到全部参数表。
搜索 BATT_AMP_PERVLT ,把这项修改为 38.写入参数
此时飞控的电压读取就会正常。
9:数传设置
使用思翼FM30高频头以及思翼FR系列接收机,是带有SBUS遥控及数传一体化。使用数传,可以方便的不连接USB数据线情况下远程对飞机进行调参和航点输入等功能,非常方便使用。
数传使用一个空余的UART端口,我喜欢使用F4V3飞控的UART1端口作为数传连接。对应ardupilot为Serial 1端口,把端口设置为:
SERIAL1_BAUDRTE 57 (设置端口波特率为57600)
SERIAL1_OPTIONS 0
SERIAL1_PROTOCOL 2
接线要求:
数传 R----飞控 TX1
数传 T----飞控 RX1 设置成功,飞机通电,安卓手机/windows电脑蓝牙连接FM30高频头,就可以在安卓手机启动QGC软件,windows电脑启动QGC软件或者MissionPlanner调参软件 选项蓝牙连接的端口。连接后就可以查看飞控的参数及写入。
10: 思翼接收机及CRSF接收机 RSSI设置
思翼接收机与黑羊CRSF接收机的RSSI均使用一个PWM通道模拟RSSI信号。思翼使用CH16通道,CRSF接收机使用CH12通道。
我们需要在RSSI选项修改参数
RSSI_TYPE 2 (使用一个PWM通道作为RSSI信号输入)
写入参数并且刷新参数后,查找“RSSI_CHANNL”
思翼接收机,设置为 RSSI_CHANNL 16
CRSF接收机,设置为 RSSI_CHANNL 12
20220305补充:
通过实测,思翼FM30高频头+思翼接收机,在测试中,原地开控,RSSI显示99. 原地关控,RSSI显示保持99(无解)。
不用担心,在实际拉锯测试及飞行过程中,RSSI依旧会根据信号距离及阻挡,RSSI显示的数值会衰减(实测飞机在家里,拿着屏幕和遥控及FM30高频头,走出门口,关门,下楼,在屏幕中能看到RSSI信号是逐步衰减的。)此时关控,屏幕里的RSSI信号会转为0,然后自动进入故障保护,启动RTL模式。
20220305补充
11:使用大疆天空端连接设置
大疆天空端与飞控是通过串口连接,天空端的TX接到空余端口的RX,天空端的RX接到空余端口的TX。我常用串口1作为大疆天空端连接。所以对应的SERIAL1设置应该如下:
SERIAL1_BAUDRTE 115
SERIAL1_OPTIONS 0
SERIAL1_PROTOCOL 33
同时修改 OSD_TYPE 这项修改为 3 (默认是 1 )
重启飞控正确连接飞控,天空端供电正常,眼镜连接正常,并且大疆眼镜打开“自定义OSD”,即可显示眼镜所支持的OSD显示类型。
DJI眼镜部分OSD项目不能支持显示。
已知常用的可以显示的为:
电池电压,电流,电量,GPS星数,经纬度,离家距离,航程累计 ,高度,高度变化值,速度,RSSI,俯仰角,横滚角。
确认不支持显示的是:
模拟水平线,离家方位角,模式名称,当前油门量。
12:WS2812可编程LED灯条使用 建议把WS2812灯条接3条线 GND 4~7V IN ,接成2.54 3P杜邦头,直接插在PWM舵机输出位。8颗LED发光的功耗大约为100mw,所以对飞控舵机5V供电负载较小。以下我们举例使用飞控的PWM6口作为WS2812灯条接口。需要设置以下参数 (全部参数表,全部参数树)
SERVO6_FUNCTION: 120 (默认为0,SERVO X就是对应的PWM接口序号)
NTF_LED_LEN: 8 (8指的是接入LED灯条的LED颗粒数量,理论最大32,实际可用多少未能完整测试)
NTF_LED_TYPE: 455
NTF_LED_OVERRIDE: 0 (飞控解锁,LED显示蓝灯长亮。飞控锁定,LED显示蓝灯闪烁)
2 (飞控解锁,LED显示红灯长亮。飞控锁定,LED显示绿灯长亮)
3 (飞控解锁,LED显示红灯闪烁。飞控锁定,LED显示黄灯闪烁)
实测WS2812灯条可以2条串联使用,串联第三条无法工作(本人使用每条8颗LED的直条型WS2812灯条测试),串联2条8颗LED灯条,需要设置NTF_LED_LEN: 16
所有参数的修改,千万记得在输入参数后,点击右边的“写入参数”
至此,F4V3飞控刷ardupilot固件的调参已经基本完成,飞机上天前,需要检查:手动模式舵面方向检查,FBWA增稳模式下各个舵面修正姿态的动作方向。GPS卫星数正常高于6颗星就完成HOME返航点定位。请在确保飞行环境安全的前提下进行固定翼无人机飞行操控。
以上文字为飘飘亲手打字完成。各项参考文献来源于论坛相关贴的学习,B站视频学习,本地模友指导使用。若有不完善地方请提醒并多多包涵。祝所有玩家开心爽飞。
本帖文字及图片,若有转载,请注明出处。
本帖无任何商业推广行为,完全出于玩家观点整理。

















 712
712

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









