







背景
当前处于戴眼镜与口罩识别头部位姿分支

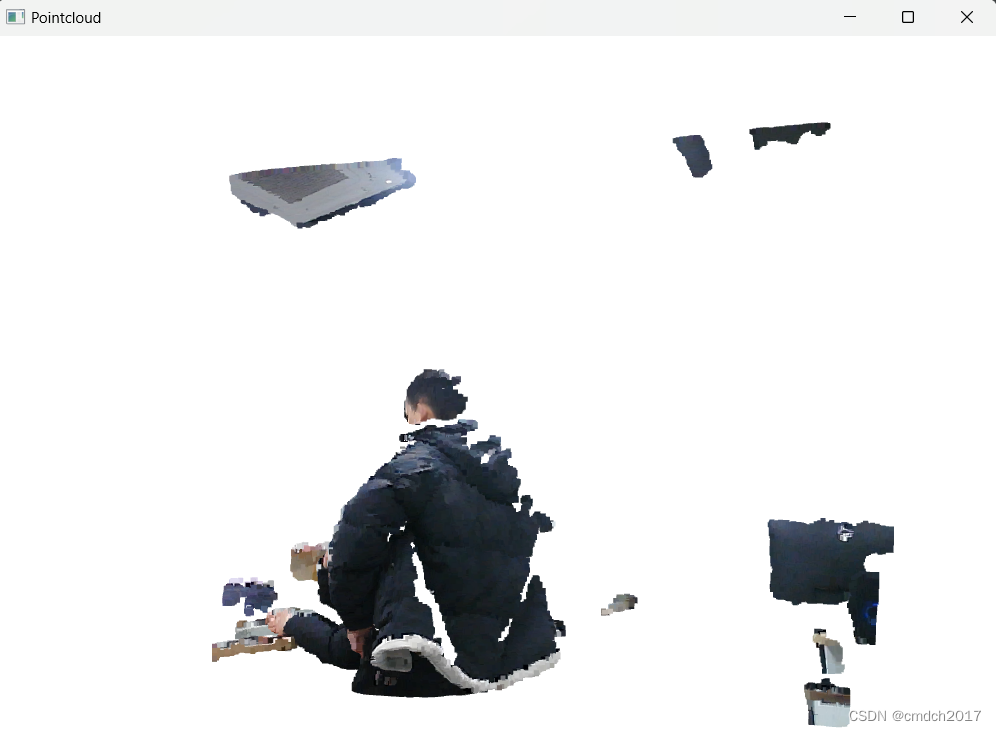
github上找到的python读取点云的代码
import time
import cv2 as cv
import numpy as np
import open3d
from openni import _openni2
from openni import openni2
SAVE_POINTCLOUDS = True # 是否保存点云数据
def get_rgbd(color_capture, depth_stream, depth_scale=1000, depth_trunc=4, convert_rgb_to_intensity=False):
# 获取彩色图像
_, color_image = color_capture.read()
color_image = color_image[:, ::-1, ::-1]
# 获取深度图像
depth_frame = depth_stream.read_frame()
depth_image = np.frombuffer(depth_frame.get_buffer_as_uint16(), np.uint16)
depth_image = depth_image.reshape(depth_frame.height, depth_frame.width)
depth_image = depth_image.astype(np.float32)
# 从深度和彩色图像创建RGBD图像
color_image = np.ascontiguousarray(color_image)
depth_image = np.ascontiguousarray(depth_image)
rgbd = open3d.geometry.RGBDImage.create_from_color_and_depth(
open3d.geometry.Image(color_image),
open3d.geometry.Image(depth_image),
depth_scale=depth_scale,
depth_trunc=depth_trunc,
convert_rgb_to_intensity=convert_rgb_to_intensity
)
return rgbd
def main():
# 初始化OpenNI
openni2.initialize()
# 打开Astra彩色流(使用OpenCV)
color_capture = cv.VideoCapture(1)
color_capture.set(cv.CAP_PROP_FPS, 5)
# 打开Astra深度流(使用OpenNI)
depth_device = openni2.Device.open_any()
depth_stream = depth_device.create_depth_stream()
depth_stream.start()
depth_stream.set_video_mode(
_openni2.OniVideoMode(pixelFormat=_openni2.OniPixelFormat.ONI_PIXEL_FORMAT_DEPTH_1_MM,
resolutionX=640,
resolutionY=480,
fps=5))
depth_device.set_image_registration_mode(openni2.IMAGE_REGISTRATION_DEPTH_TO_COLOR)
# 创建点云可视化器
visualizer = open3d.visualization.Visualizer()
visualizer.create_window("Pointcloud", width=1000, height=700)
# Astra Pro相机的相机内参
astra_camera_intrinsics = open3d.camera.PinholeCameraIntrinsic(
width=640,
height=480,
fx=585,
fy=585,
cx=320,
cy=250)
# 创建初始点云
pointcloud = open3d.geometry.PointCloud()
visualizer.add_geometry(pointcloud)
first = True
prev_timestamp = 0
num_stored = 0
while True:
rgbd = get_rgbd(color_capture, depth_stream)
# 将图像转换为点云
new_pointcloud = open3d.geometry.PointCloud.create_from_rgbd_image(
rgbd,
intrinsic=astra_camera_intrinsics,
)
# 翻转点云
new_pointcloud.transform([[1, 0, 0, 0], [0, -1, 0, 0], [0, 0, -1, 0], [0, 0, 0, 1]])
# 设置渲染的点云为记录的点云
pointcloud.points = new_pointcloud.points
pointcloud.colors = new_pointcloud.colors
# 每n秒保存一次点云
if SAVE_POINTCLOUDS and time.time() > prev_timestamp + 5:
filename = "pointcloud-%r.pcd" % num_stored
open3d.io.write_point_cloud(filename, new_pointcloud)
num_stored += 1
print("已保存: %s" % filename)
prev_timestamp = time.time()
# 在第一帧中重置视点,以正确查看场景
if first:
visualizer.reset_view_point(True)
first = False
# 更新可视化器
visualizer.update_geometry(pointcloud)
visualizer.poll_events()
visualizer.update_renderer()
if __name__ == "__main__":
main()















 1277
1277











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









