








 超级会员免费看
超级会员免费看


前言:
其中主要实现功能----自主返航-----自主前往充电点位运动------停止运行等待下一条指令接驳
在建立好充电桩后通过导航让机器人前进到当前到达的充电站的位置后记录下充电桩的位置,通过来自网页的外部响应让机器人返回当前的坐标单位,实现模拟自动回充电单元的功能,本文为前文的续篇。
前文中已经记录好非常棒的坐标点标定的方式,本文通过对之前的续作加以修改实现一个点的工作原理。简而言之就是将前方的多点导航改变为单点单任务
---------------------------------------------------------------------------------------------------------------------------------
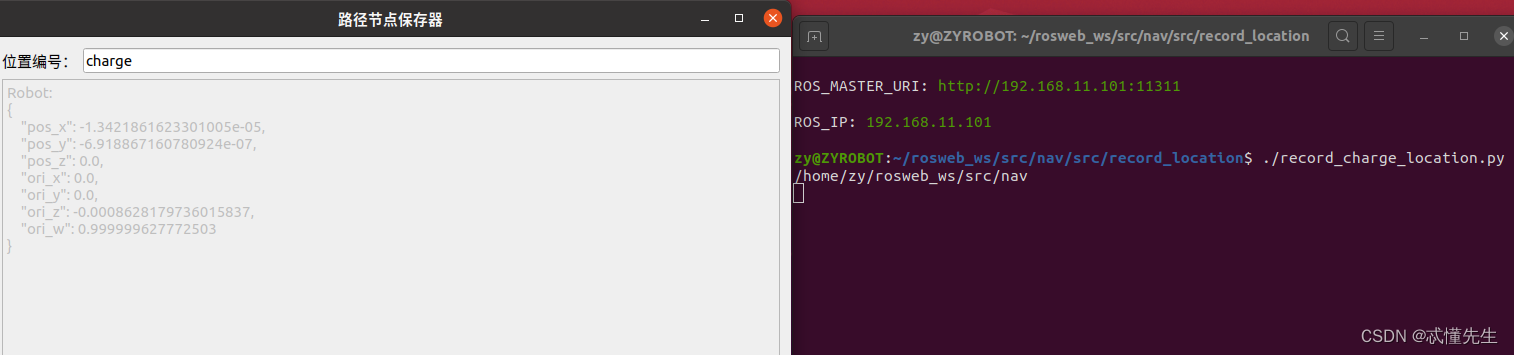
<1> 记录当前机器人充电点位Python
运行python文件可以看到跳出的QT界面其中按照上文中配置好设定后等待5s自动完成读取自动完成当前坐标点的写入
#!/usr/bin/env python3
#coding: utf-8
import sys
import rospy
from PyQt5.QtWidgets import QWidget,QApplication,QLabel,QHBoxLayout,QVBoxLayout,QPushButton,QLineEdit,QTextEdit,QCheckBox
from PyQt5.QtCore import *
from geometry_msgs.msg import PoseStamped
import json
import os
import tf
impor
 订阅专栏 解锁全文
订阅专栏 解锁全文

















 4077
4077











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











