







问题:
[ERROR] [1580993178.194686301, 0.325000000]: GazeboRosControlPlugin missing while using DefaultRobotHWSim, defaults to true.
This setting assumes you have an old package with an old implementation of DefaultRobotHWSim, where the robotNamespace is disregarded and absolute paths are used instead.
If you do not want to fix this issue in an old package just set to true.
如上是我在使用gazebo进行UR机器人仿真时出现的问题,找了好久的解决方案,最终解决,在此纪录一下。
解决方案:
例如:
1.找到当前目录下的lanch文件,然后找到此gazebo的后缀文件。例如在UR机器人里是ur_description,就进到文件目录下
roscd ur_description
再进入urdf文件夹
cd urdf
找到.gazebo.urdf/xacro类似文件(urdf或者xacro后缀)文件,打开
sudo gedit common.gazebo.xacro
然后就可以像下面一样加上这句话就可以啦
<legacyModeNS>true</legacyModeNS>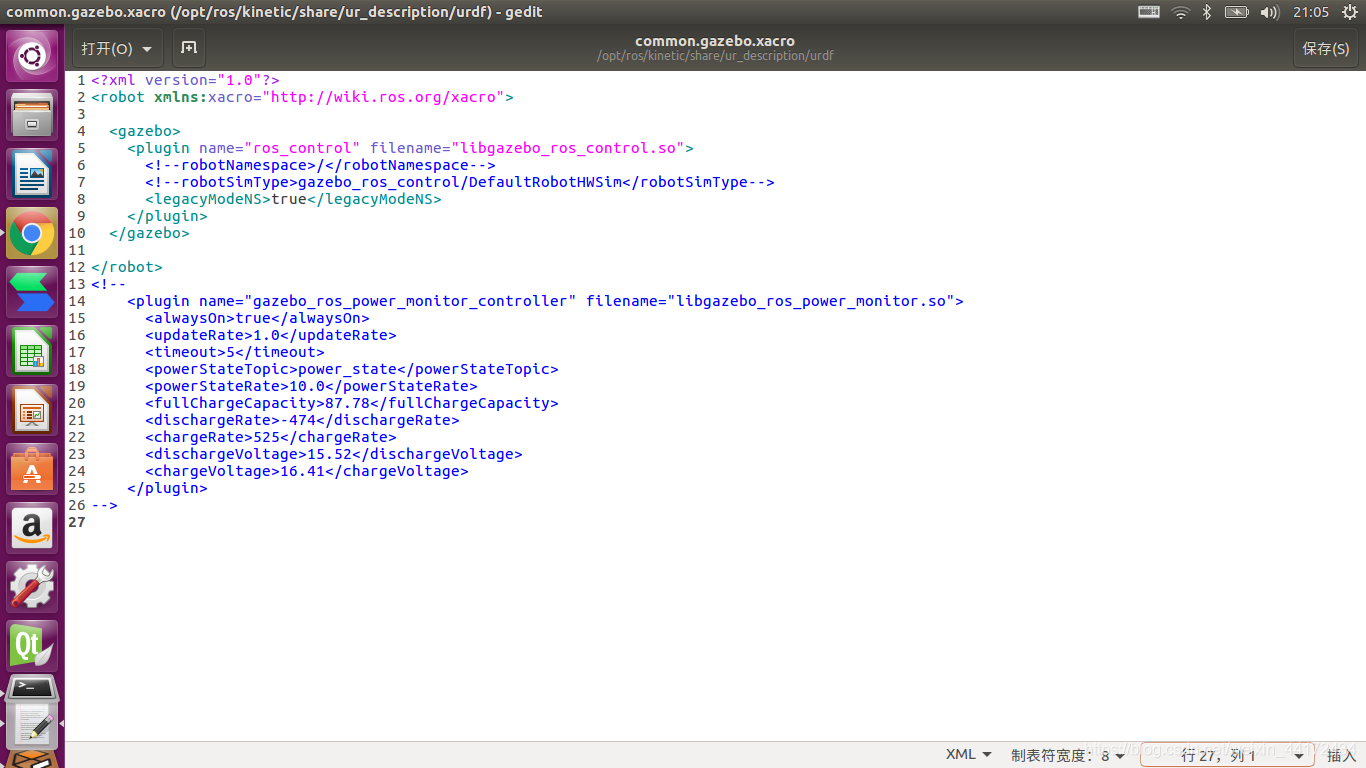















 207
207











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









