







High-Definition Map Generation Technologies for Autonomous Driving
回顾了最近利用2D和3D地图生成的高清地图生成技术。介绍了高清地图的概念及其在自动驾驶中的作用,并对高清地图生成技术进行了详细概述。
introduction
高清地图包含自动驾驶所需的道路/环境的所有关键静态属性(例如:道路、建筑物、交通灯和道路标线),包括由于遮挡而无法由传感器适当检测到的对象。
三层结构化高清地图示例
- 导航数据;HD Road;道路网
- 规划数据;HD lanes; 车道地图
- 道路DNA;HD Localization;地标/道路标记图
第一层,道路模型,定义道路特征,例如拓扑、行驶方向、高程、坡度/坡道、规则、路缘/边界和十字路口。它用于导航。
第二层,车道模型,定义了车道级别的特征,例如道路类型、线路、道路宽度、停车区域和速度限制。该层用作自动驾驶的感知模块,根据实时交通或环境做出决策。
最后一层,定位模型,在高清地图中定位自动车辆。该层包含路边设施,例如建筑物、交通信号、标志和路面标记。这些功能有助于自动车辆快速定位,尤其是在功能丰富的城市地区。
高清地图点云的数据收集
数据收集是生成高清地图的第一步
主要依靠:MMS(moblile mapping system—移动地图系统)
MMS:
- 一种配备地图传感器的移动车辆,
- 包括全球导航卫星系统(GNSS)、IMU、激光雷达(光探测和测距)、摄像头和雷达,用于收集地理空间数据。
点云地图生成方式
一旦收集到初始传感器数据,通常会对其进行融合和排序以生成初始地图,主要用于精确定位。
点云地图具有很高的精度,可以帮助地面车辆在三维空间中进行厘米级的精确机动和定位。
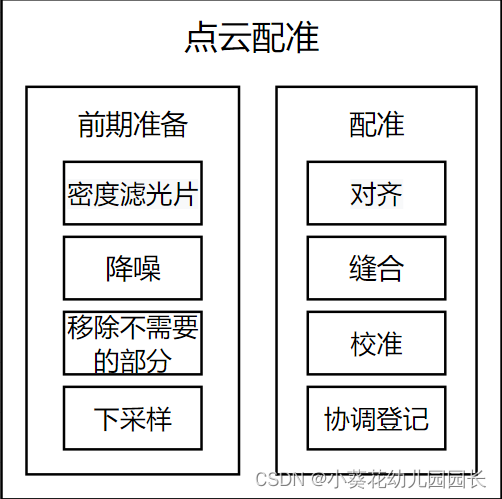
- 从映射中获得点云配准(多步骤过程):将多个重叠的点云对齐,以生成详细准确的地图
- 从PCL映射创建向量映射
矢量地图包含与车道、人行道、十字路口、道路、十字路口、交通标志和红绿灯相关的信息。
A.映射技术
- 激光作为主要传感器,用于绘制和完成高清晰度地图。
- 用视觉传感器来构建点云地图
- 有一种用于三维模型生成的点云注册技术
- 基于分割的点云配准
SegMap[15]是一种基于点云分段特征提取的映射解决方案。该方法通过将局部特征重构为具有区分性的特征来生成点云地图。
“SegMap: Segment-based mapping and
localization using data-driven descriptors,” doi: 10.1177/0278364919863090.
- 基于激光雷达的点云映射
- 里程融合点云配准
- GPS融合点云配准
- INS融合点云配准
- 视觉传感器融合点云配准
高清地图特征提取方式
道路网络提取
基于二维航空图像的道路提取
- 基于分割的方法
从航空图像中预测分割概率图,细化分割预测并通过后处理提取图形。 - 迭代图增长法
迭代图生长方法通过首先选择道路网络的几个顶点,从二维航空图像生成道路网络。然后,逐点生成道路,直到创建整个道路网络。 - 图形生成方法
基于三维点云的道路提取
使用3D点云的道路提取是使用分割完成的。
论文:Creation of high definition map
for autonomous driving within specific scene















 1557
1557











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









