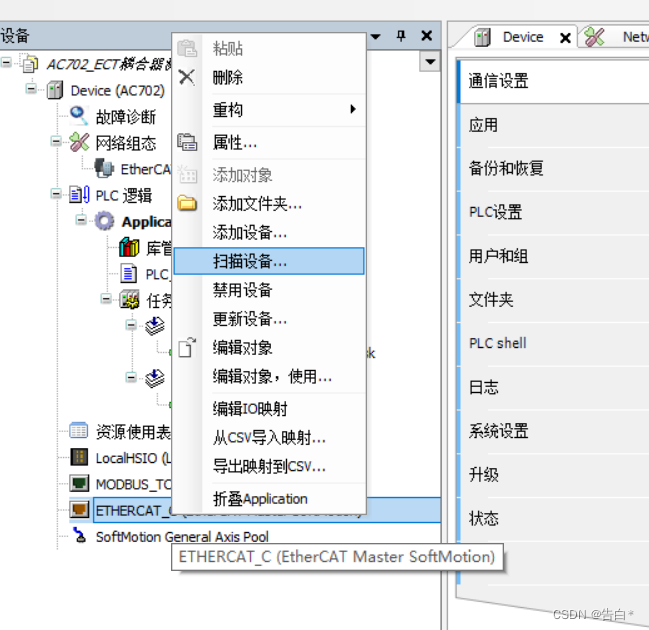
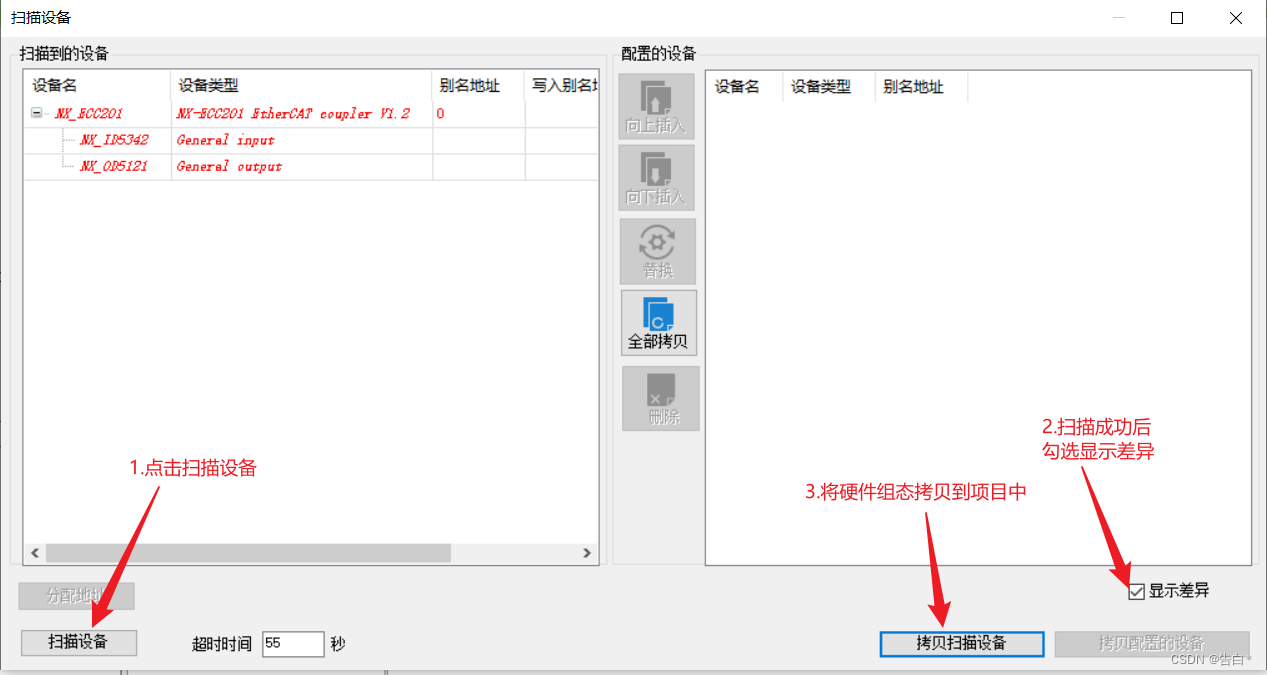
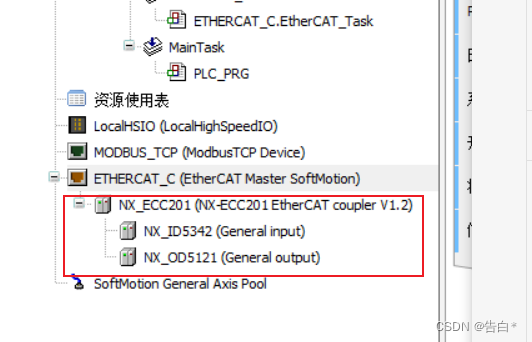
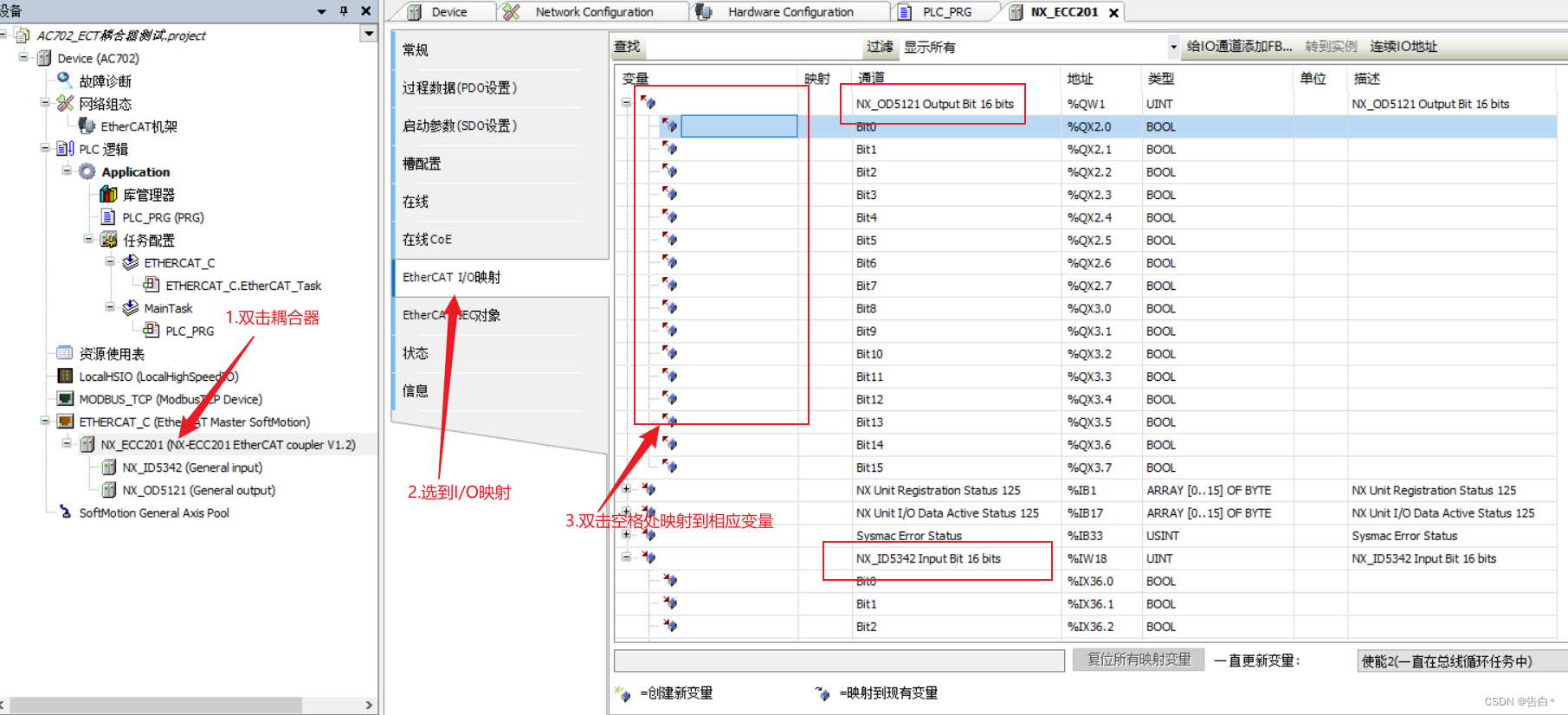
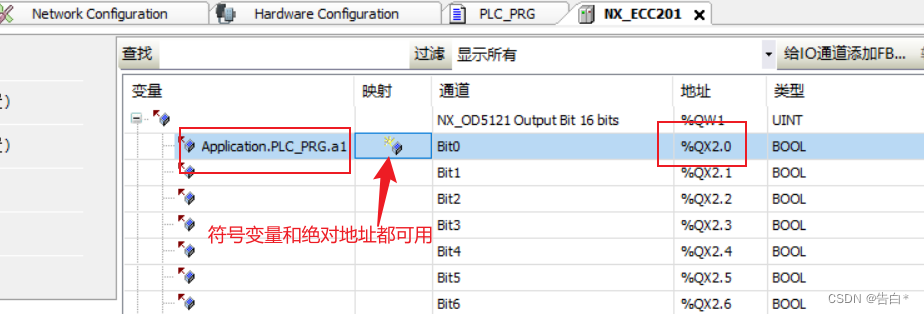
文章目录 1. 扫描设备 2. 拷贝组态 3. IO映射 原因 使用第三方耦合器时,无法通过InoProShop软件组态耦合器上的IO模块。 解决方法 扫描硬件组态并上传至软件。 以欧姆龙ECC201为例,舜昌SC7 3077-ECT22等其他第三方耦合器同理 需要先将硬件部分连接好,再进行软件配置 1. 扫描设备 在ETHERCAT_C上右键扫描设备 2. 拷贝组态 3. IO映射 有两种映射模式








 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1572
1572

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






