







点云库PCL学习笔记 -- 点云滤波Filtering -- 6.ConditionalRemoval 条件滤波 和 RadiusOutlierRemoval 半径滤波
相关知识点
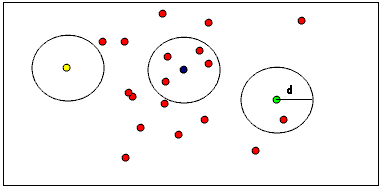
下面的图片有助于可视化RadiusOutlierRemovement过滤器对象的功能。用户指定多个邻居,每个索引必须在指定半径内具有这些邻居才能保留在点云中。例如,如果指定了1个邻居,则仅从点云中删除黄点。如果指定了两个相邻点,则黄色和绿色点都将从点云中删除。
1. ConditionalRemoval 条件滤波 和 RadiusOutlierRemoval 半径滤波代码
ConditionalRemoval 条件滤波 和 RadiusOutlierRemoval 半径滤波代码remove_outliers.cpp
#include <iostream>
#include <pcl/point_types.h>
#include <pcl/filters/radius_outlier_removal.h>
#include <pcl/filters/conditional_removal.h>
int
main (int argc, char** argv)
{
//确保输入的参数
if (argc != 2)
{
std::cerr << "please specify command line arg '-r' or '-c'" << std::endl;
exit(0);
}
//
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered (new pcl::PointCloud<pcl::PointXYZ>);
//使用随机数生成点云数据
cloud->width = 10;
cloud->height = 1;
cloud->resize (cloud->width * cloud->height);
for (auto& point: *cloud)
{
point.x = 1024 * rand () / (RAND_MAX + 1.0f);
point.y = 1024 * rand () / (RAND_MAX + 1.0f);
point.z = 1024 * rand () / (RAND_MAX + 1.0f);
}
// RadiusOutlierRemoval 滤波器
if (strcmp(argv[1], "-r") == 0){
pcl::RadiusOutlierRemoval<pcl::PointXYZ> outrem; //创建 RadiusOutlierRemoval 滤波器对象
// build the filter
outrem.setInputCloud(cloud); //设置输入点云
outrem.setRadiusSearch(0.8); //设置在 0.8 半径的范围内找近邻点
outrem.setMinNeighborsInRadius (2); //设置查询点的邻近点集数小于 2 的删除
outrem.setKeepOrganized(true); //设置保持为结构点云
// apply filter
outrem.filter (*cloud_filtered); //执行半径滤波,结果存储在 cloud_filtered
}
else if (strcmp(argv[1], "-c") == 0){
//创建条件限定的下的滤波器
pcl::ConditionAnd<pcl::PointXYZ>::Ptr range_cond (new
pcl::ConditionAnd<pcl::PointXYZ> ());
//为条件定义对象添加比较算子
// GT greater than
// EQ equal
// LT less than
// GE greater than or equal
// LE less than or equal
//添加在Z字段上大于 0 的比较算子
range_cond->addComparison (pcl::FieldComparison<pcl::PointXYZ>::ConstPtr (new pcl::FieldComparison<pcl::PointXYZ> ("z", pcl::ComparisonOps::GT, 0.0)));
//添加在Z字段上小于 0.8 的比较算子
range_cond->addComparison (pcl::FieldComparison<pcl::PointXYZ>::ConstPtr (new pcl::FieldComparison<pcl::PointXYZ> ("z", pcl::ComparisonOps::LT, 0.8)));
// build the filter
pcl::ConditionalRemoval<pcl::PointXYZ> condrem; //创建 ConditionalRemoval 条件滤波器
condrem.setCondition (range_cond); //用条件定义进行初始化,大于0.0小于0.8这两个条件用于建立滤波器
condrem.setInputCloud (cloud); //设置输入点云
condrem.setKeepOrganized(true); //设置保持为结构点云,如果设置为true且不设置setUserFilterValue的值,则用nan填充点云
// apply filter
condrem.filter (*cloud_filtered); //执行条件滤波,结果存储在 cloud_filtered
}
else{
std::cerr << "please specify command line arg '-r' or '-c'" << std::endl;
exit(0);
}
//打印输出滤波前的点云数据信息
//for (size_t i = 0; i < cloud->points.size(); ++i)
std::cerr << "Cloud before filtering: " << std::endl;
for (const auto& point: *cloud)
std::cerr << " " << point.x << " "
<< point.y << " "
<< point.z << std::endl;
//打印输出滤波后的点云数据信息
//for (size_t i = 0; i < cloud_filtered->points.size(); ++i)
std::cerr << "Cloud after filtering: " << std::endl;
for (const auto& point: *cloud_filtered)
std::cerr << " " << point.x << " "
<< point.y << " "
<< point.z << std::endl;
return (0);
}
2. 编译文件
设置编译文件CMakeLists.txt
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(remove_outliers)
find_package(PCL 1.2 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (remove_outliers remove_outliers.cpp)
target_link_libraries (remove_outliers ${PCL_LIBRARIES})
编译
mkdir build
cd build/
cmake ..
make
3. 测试
- ConditionalRemoval 条件滤波
执行程序
cd ..
./build/remove_outliers -c
结果如下:
condrem.setKeepOrganized(true);
设置是否保留滤波后删除的点,以保持点云的有序性,通过setuserFilterValue设置的值填充点云;或从点云中删除滤波后的点,从而改变其组织结构
如果设置为 true 且不设置 setUserFilterValue 的值,则用 nan 填充点云
这边若是使用 condrem.setKeepOrganized(true);//设置保持为结构点云该函数的话,结果如下所示
会产生相对应的 nan 填充点云

这里是将 ==condrem.setKeepOrganized(true);==注释掉后,程序的执行情况
没有 nan 填充点云

- RadiusOutlierRemoval 半径滤波
执行程序
cd ..
./build/remove_outliers -r
















 105
105











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









