







平台:华硕 Thinker Edge R 瑞芯微 RK3399Pro
固件版本:Tinker_Edge_R-Debian-Stretch-V1.0.4-20200615
记录自【古月居】古月·ROS入门21讲 | 一学就会的ROS机器人入门教程 —— 古月居GYH P16 16.参数的使用与编程方法
创建功能包
cd ~/catkin_workspace/src
catkin_create_pkg learning_parameter roscpp rospy std_srvs
参数命令行使用
YAML参数文件
background_b: 255
background_g: 86
background_r: 69
rosdistro: 'lunar'
roslaunch:
uris: {host_hcx_vpc__43763: 'http://hcx-vpc:43763/'}
rosversion: '1.14.31'
run_id: 077058de-a38b-11e9-818b-000c29d22e4d
rosparam
# 新建一个终端
roscore
# 新建一个终端
rosrun turtlesim turtlesim_node
# 新建一个终端
rosparam
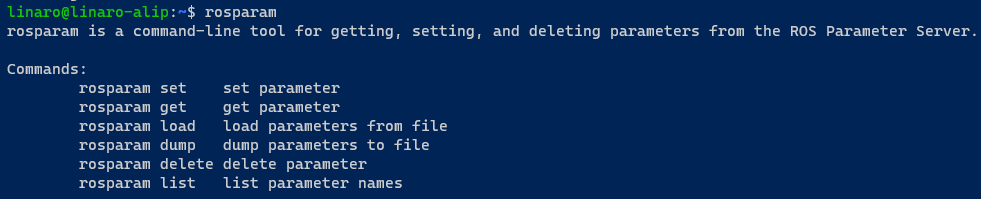
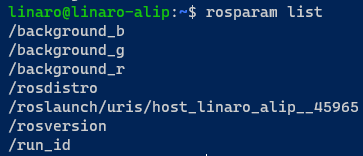
列出当前参数
rosparam list
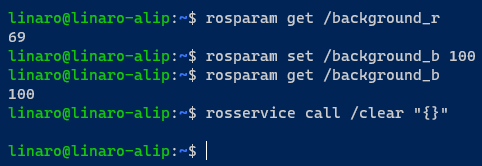
显示某个参数值
rosparam get param_key

设置某个参数值
rosparam set param_key param_value

保存参数到文件
rosparam dump file_name

从文件读取参数
rosparam load file_name
删除参数
rosparam delete param_key
C++
编写程序
nano ~/catkin_workspace/src/learning_parameter/src/parameter_config.cpp
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程设置/读取海龟例程中的参数
*/
#include <string>
#include <ros/ros.h>
#include <std_srvs/Empty.h>
int main(int argc, char **argv)
{
int red, green, blue;
// ROS节点初始化
ros::init(argc, argv, "parameter_config");
// 创建节点句柄
ros::NodeHandle node;
// 读取背景颜色参数
ros::param::get("/background_r", red);
ros::param::get("/background_g", green);
ros::param::get("/background_b", blue);
ROS_INFO("Get Backgroud Color[%d, %d, %d]", red, green, blue);
// 设置背景颜色参数
ros::param::set("/background_r", 255);
ros::param::set("/background_g", 255);
ros::param::set("/background_b", 255);
ROS_INFO("Set Backgroud Color[255, 255, 255]");
// 读取背景颜色参数
ros::param::get("/background_r", red);
ros::param::get("/background_g", green);
ros::param::get("/background_b", blue);
ROS_INFO("Re-get Backgroud Color[%d, %d, %d]", red, green, blue);
// 调用服务,刷新背景颜色
ros::service::waitForService("/clear");
ros::ServiceClient clear_background = node.serviceClient<std_srvs::Empty>("/clear");
std_srvs::Empty srv;
clear_background.call(srv);
sleep(1);
return 0;
}
配置CMakeLists.txt
nano ~/catkin_workspace/src/learning_parameter/CMakeLists.txt
添加
add_executable(parameter_config src/parameter_config.cpp)
target_link_libraries(parameter_config ${catkin_LIBRARIES})

编译并运行
cd ~/catkin_workspace
catkin_make
# 新建一个终端
source ~/catkin_workspace/devel/setup.bash
roscore
# 新建一个终端
source ~/catkin_workspace/devel/setup.bash
rosrun turtlesim turtlesim_node
# 新建一个终端
source ~/catkin_workspace/devel/setup.bash
rosrun learning_parameter parameter_config

python
编写程序
cd ~/catkin_workspace/src/learning_parameter
mkdir scripts
nano ~/catkin_workspace/src/learning_parameter/scripts/parameter_config.py
#!/usr/bin/env python
# -*- coding: utf-8 -*-
########################################################################
#### Copyright 2020 GuYueHome (www.guyuehome.com). ###
########################################################################
# 该例程设置/读取海龟例程中的参数
import sys
import rospy
from std_srvs.srv import Empty
def parameter_config():
# ROS节点初始化
rospy.init_node('parameter_config', anonymous=True)
# 读取背景颜色参数
red = rospy.get_param('/background_r')
green = rospy.get_param('/background_g')
blue = rospy.get_param('/background_b')
rospy.loginfo("Get Backgroud Color[%d, %d, %d]", red, green, blue)
# 设置背景颜色参数
rospy.set_param("/background_r", 255);
rospy.set_param("/background_g", 255);
rospy.set_param("/background_b", 255);
rospy.loginfo("Set Backgroud Color[255, 255, 255]");
# 读取背景颜色参数
red = rospy.get_param('/background_r')
green = rospy.get_param('/background_g')
blue = rospy.get_param('/background_b')
rospy.loginfo("Get Backgroud Color[%d, %d, %d]", red, green, blue)
# 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
rospy.wait_for_service('/clear')
try:
clear_background = rospy.ServiceProxy('/clear', Empty)
# 请求服务调用,输入请求数据
response = clear_background()
return response
except rospy.ServiceException, e:
print "Service call failed: %s"%e
if __name__ == "__main__":
parameter_config()
运行
sudo chmod +x ~/catkin_workspace/src/learning_parameter/scripts/parameter_config.py
# 新建一个终端
source ~/catkin_workspace/devel/setup.bash
roscore
# 新建一个终端
source ~/catkin_workspace/devel/setup.bash
rosrun turtlesim turtlesim_node
# 新建一个终端
source ~/catkin_workspace/devel/setup.bash
rosrun learning_parameter parameter_config.py

















 1804
1804











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











