






激光雷达的原理
LiDAR(Light Detection And Ranging)激光的探测与测距,工作在光学波段的雷达
原理:器件发出光,经过反射过来进行探测,计算其时间、距离等
优点:
- 1、具有**极高的分辨率。**因为光与声呐相比,距离分辨率高,角分辨率高,波长非常短,指向性非常好。
- 2、抗干扰能力强。激光单一性比较好,波长角度比较短,发散角度比较小。 所以多路径效应,与其他物体的效应比较低。
- 3、获取的信息量是足够丰富。光的反射可以推荐他的颜色、距离、角度可以获得多维度图像。有激光雷达图像移
- 4、可全天时工作。因为相比摄像头,激光雷达是主动器件,可以满足全天时工作。对于晚上等对激光雷达是比较友好的。
缺点:
- 1、容易受环境因素等反射的物质的影响,
- 2、在实际的测试中,像灰尘,飞虫,雨天,使得器件无法正常干扰。
相比二维图像的信息来说,三维激光可以去获取周围的环境信息,可以更好的进行定位环境建图、路径规划。
激光雷达分类
velodyne LiDAR是属于机械式的TOF方法
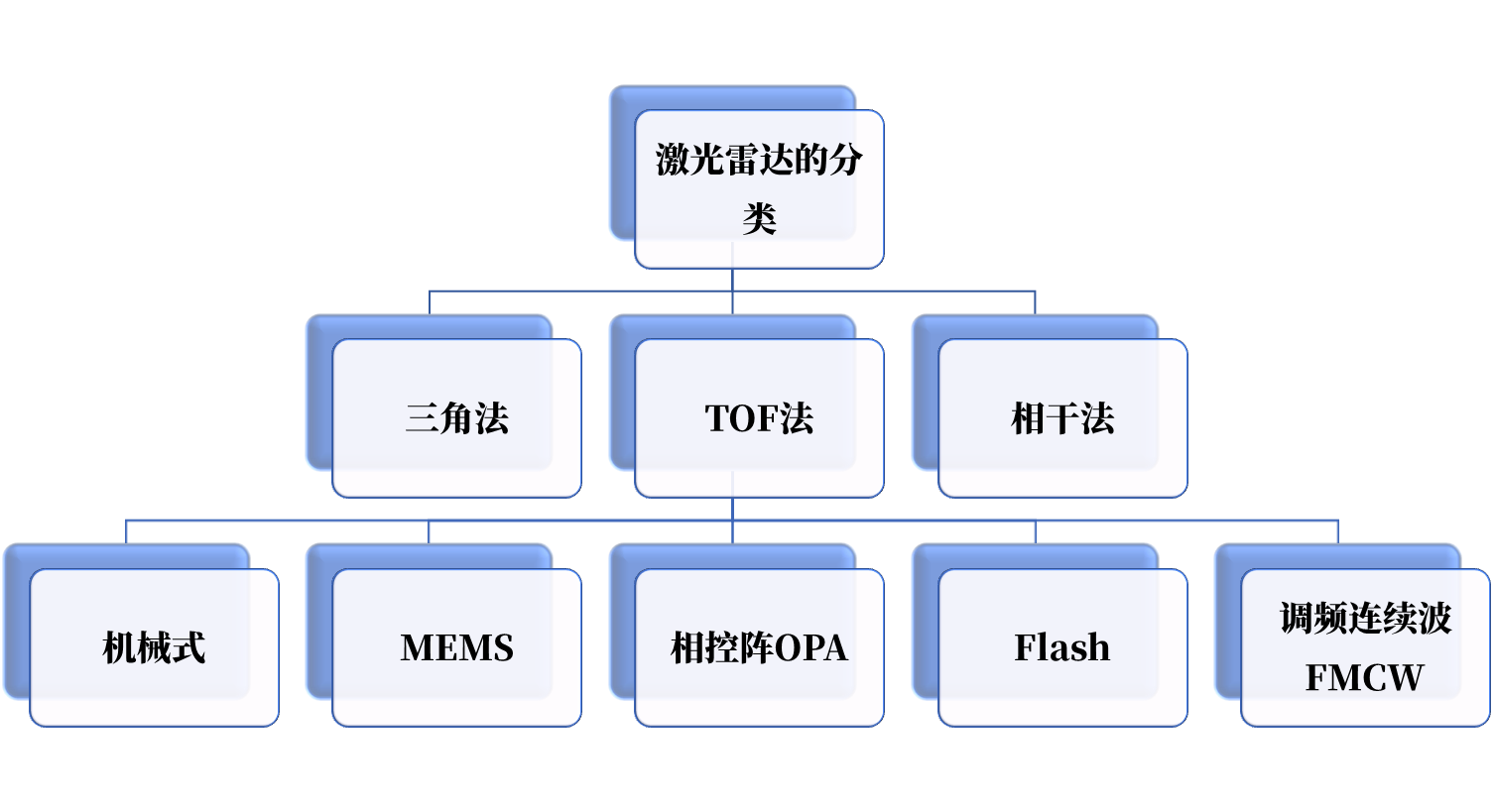
激光总得分类是分为三大类:三角法、TOF法、相干法
总的分类
三角法:思岚等二维激光雷达为主,主要是以三角法进行测量。
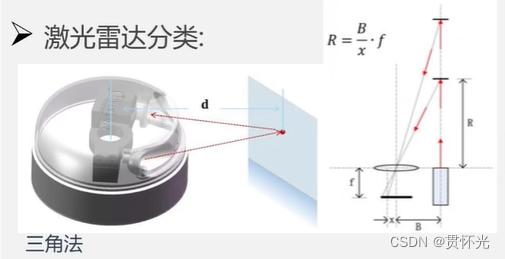
通过反射成像的光在成像的的像素位置计算偏差,成像的焦距和真实的三角形的相似三角形。这是最简单、最有效的,最低成本的,用在二维的激光(如扫地机器人),在工业领域中也有较好的应用,可以拿到百微米的精度。
但是缺点是:随着距离的增加,其他条件变差,他的距离10m左右。
由于光学器件的原因,他必须有一个连续的激光照明。适用于功率比较低,抗干扰能力比较差,基本上只能适应于室内场景。而在室外场景的强光情况下,是无法使用的。
TOF法:默认的测量方法,其中TOF方法也分为很多种,主要是分为脉冲型TOF和连续型FMCW(相干法)。
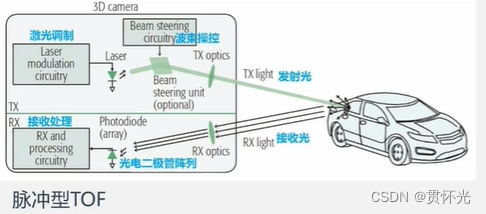
脉冲型(DTOF直接测量时间的)
通过器件发出单脉冲的光,来测出时间和相位。可以通过这种来计算
- 特点是**:随着距离的增加,所要测算的时间的精度更加高**,另外一点,发射器件功率也需要要加大。对器件有个要求,相应的要求是提高分辨率和扩大测量范围,需要提高功率。,相对于长距离的方法是没有办法测算到的
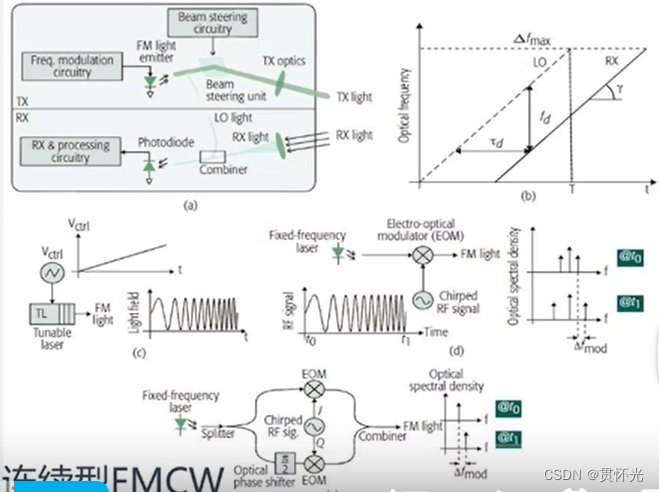
相干法ITOF
相干法主要是测量两个波的相干性来进行测算。测相位差计算,可以测量很好的距离特点。
- 特点:需要进行波形比对,需要对连续 的波长叠加进行计算**,速度比较快快,精度比较高。**常常用在手持的扫描仪器中,又拿着手持激光扫描仪来进行建模
最常见的激光雷达
-
**机械式:**存在机械旋转器件,将光束打出去(时间和距离),来计算三维结构。
-
激光的调制,光束的范围的感知方向,以感知环境范围策划。
-
采用的发射器:905半导体的
-
MSMS器件:非固态激光雷达:旋转器件在震动的情景不能稳定运作的,手机里面的加工MSMS器件,其有很有很多加工工艺,可以过车规。手机加上均匀的加上光束,并且上下进行摆动,获得周围的环境。
-
光学相位阵列OPA:通过电磁学的特性,通过波导天线调整发射功率来角度,通过光学相位阵列芯片,通过机械运动来进行调整。相对MSMS来说OPA方式会更加可靠,未来发力在这个方向!!
-
Flash雷达:特点是通过一次发光器件向周围全部打光,不需要光束调整,通过中间器件的漫反射来,如ITOF芯片。,可以讲激光的精度达到图像的分辨率。成像效果比较稠密。
















 1335
1335











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











