






ros2 launch realsense2_camera rs_launch.py align_depth.enable:=true pointcloud.enable:=true
启动相机时要加参数pointcloud.enable:=true,然后启动rviz2(直接终端输入)
如图更改rviz中的全局坐标系,由map改成camera_depth_frame或camera_color_frame
最后add-->by topic-->/camera/camera/depth/color/points-->pointcloud2即可显示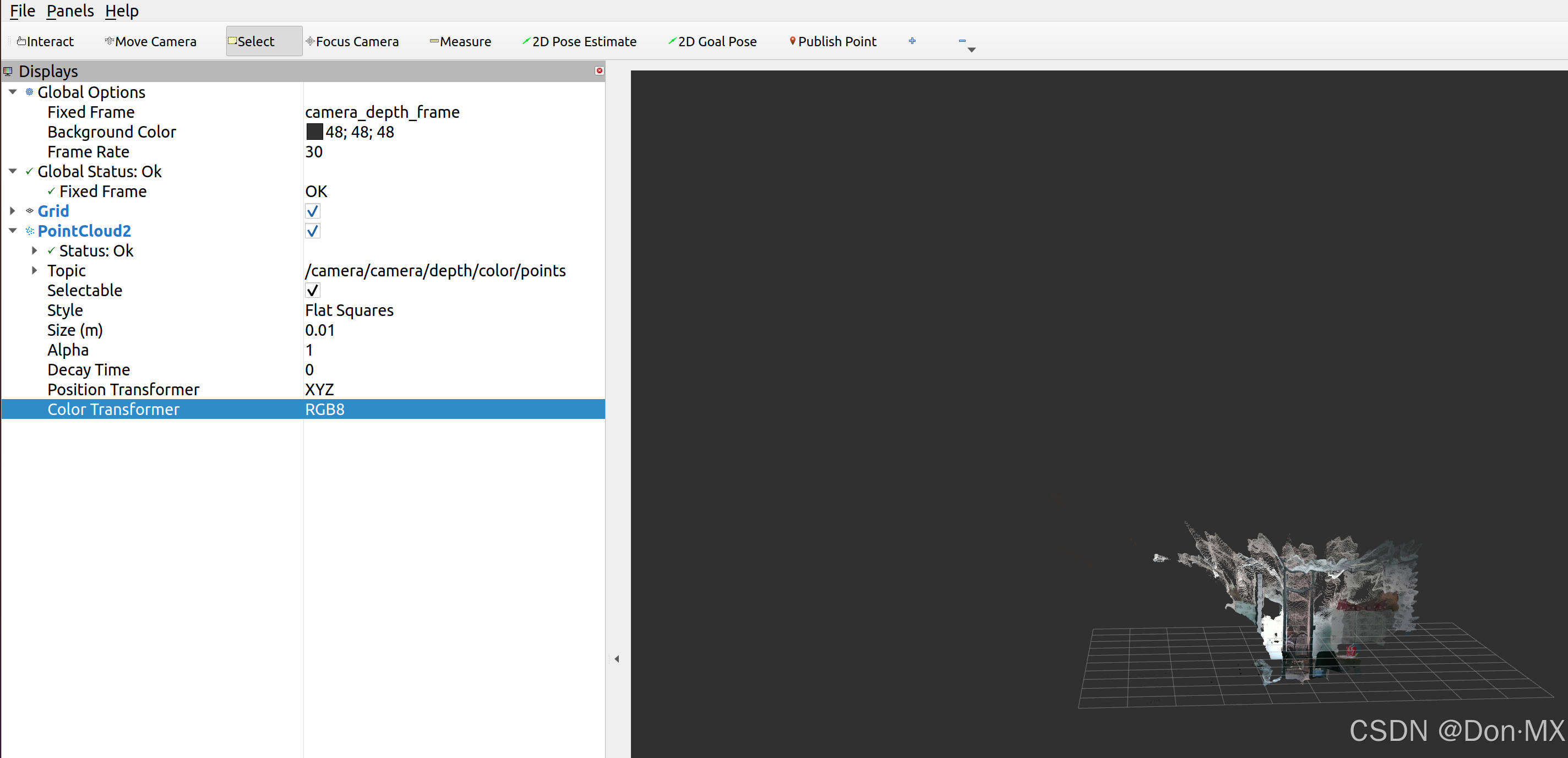
ros2 bag record /camera/camera/depth/color/points -o testpointcloud.bag通过ros2 bag将该话题保存下来命名为testpointcloud.bag,打开rviz2还是前面的方法订阅话题
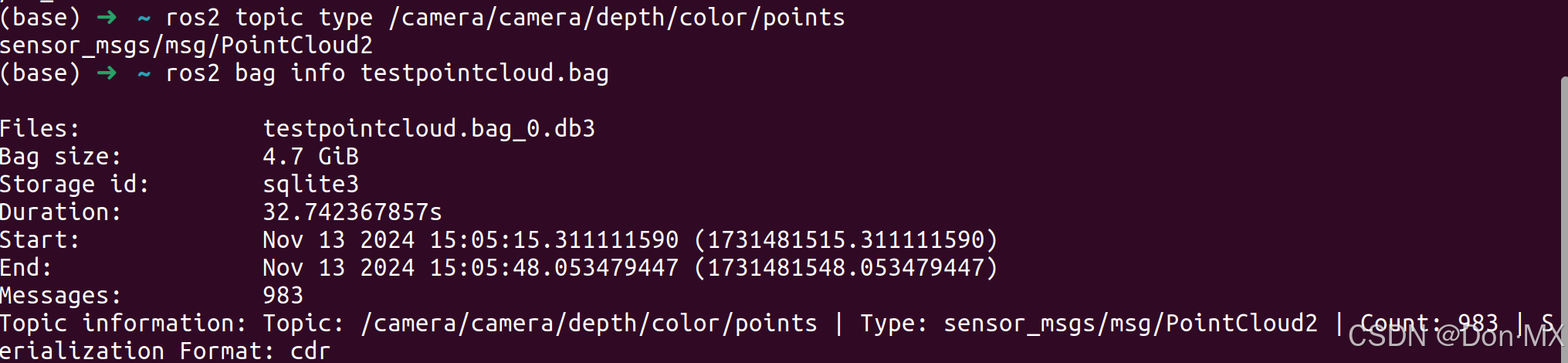
ros2 bag play testpointcloud.bag运行后可视化点云,ros2 bag info ---.bag查看信息

















 2706
2706

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









