







1-功能实现
地图保存与加载在V1.0已经实现,只需要配置相应的yaml文件即可,也就是相机yaml文件,例如Example中的RealSense_D435i.yaml文件
2-地图保存
只需要在yaml文件末尾处添加如下配置
System.SaveAtlasToFile: "/home/xy/atlas"
注意这里的路径是你自己想保存的路径
(1)注意:在源码中它默认添加’./',本人将源码中的./删掉了,直接将地图保存到任意位置
代码位置:src/System.cc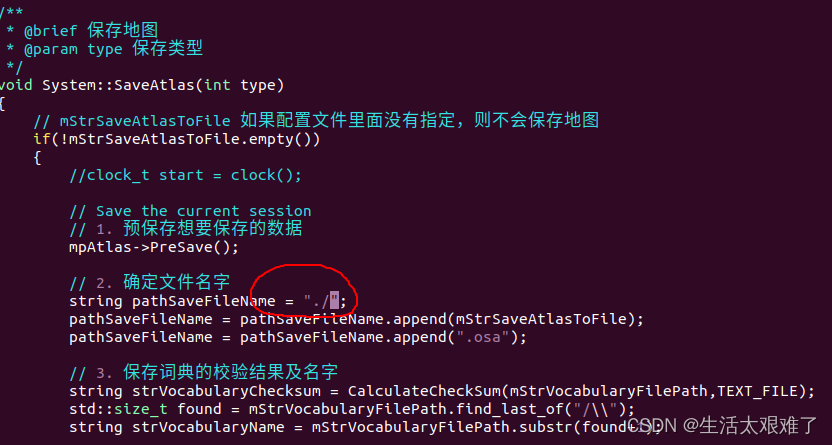
3-地图加载
在yaml文件末尾添加,注意路径你自己想保存的位置
System.LoadAtlasFromFile: "/home/xy/atlas"
System.SaveAtlasToFile: "/home/xy/atlas"
为什么要重新保存呢?
答:因为地图会变,当然也可以不保存,只加载。
(1)源码位置:src/System.cc,注意我这里已经将./删掉了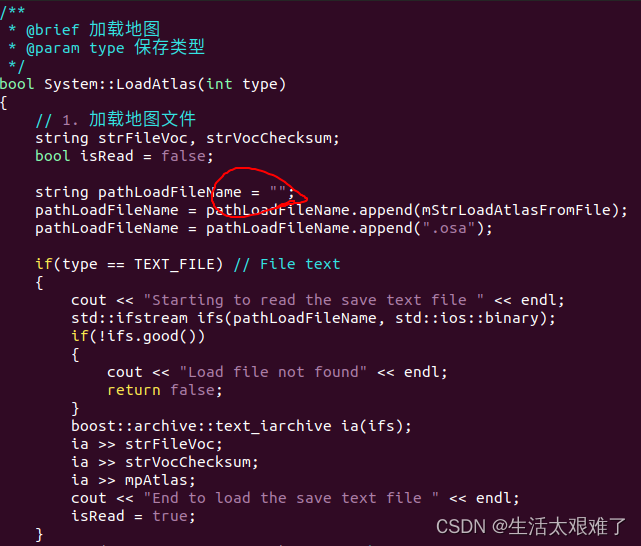














 5856
5856











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









