






 本文介绍了ROS Melodic中的三个实用工具:Plotjuggler作为强大的数据绘图工具,ez-publisher用于便捷的话题发布,以及rosmon作为roslaunch的替代品,提供了更高效的节点监控和调试功能。通过实例操作,展示了如何使用这些工具进行话题监听、数据可视化和节点管理。
本文介绍了ROS Melodic中的三个实用工具:Plotjuggler作为强大的数据绘图工具,ez-publisher用于便捷的话题发布,以及rosmon作为roslaunch的替代品,提供了更高效的节点监控和调试功能。通过实例操作,展示了如何使用这些工具进行话题监听、数据可视化和节点管理。
目录
本文以melodic为例,大家可以根据自己使用的版本进行修改
2022-07-26
一、plotjuggler 强大的绘图工具
sudo apt-get install ros-melodic-plotjuggler 普通版
sudo apt-get install ros-melodic-plotjuggler-ros ros版,可以订阅话题
rosrun plotjuggler plotjuggler
平替:rqt_plot
这里选择ROS Topic Subscriber,然后点击start,在弹出的列表中选择想要监听的话题,在左侧的列表中将数据拖拽到窗口中即可
右键下拉菜单:
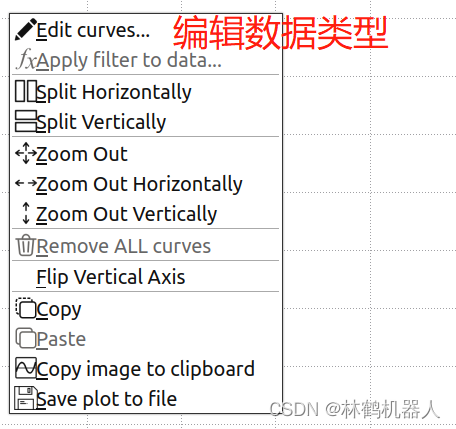
Edit curves 修改绘制图像类型
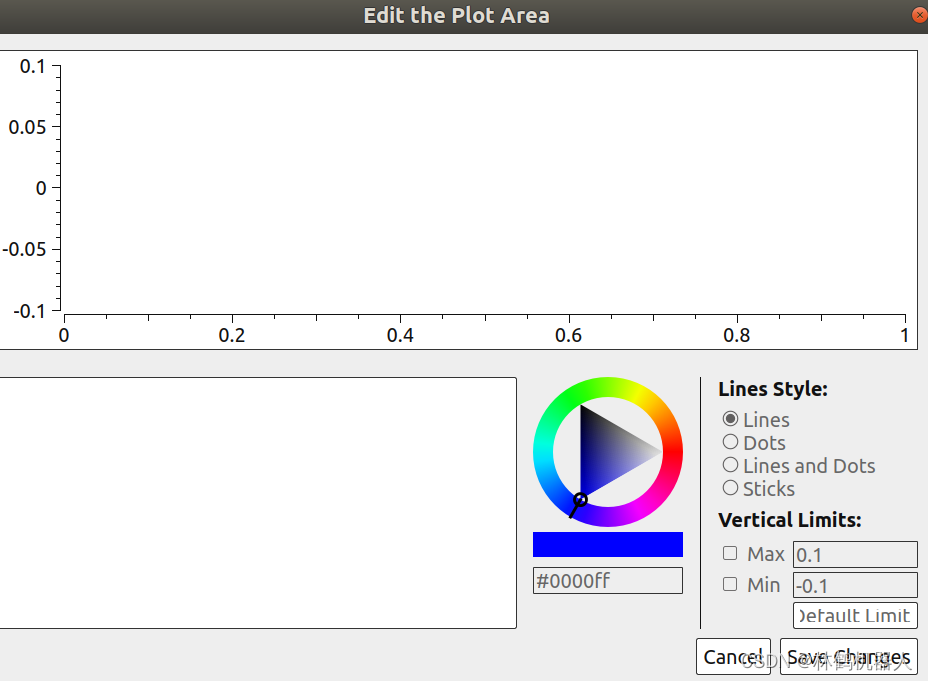
可以选择离散绘制(dots)和连续绘制(lines)
可以选择绘制的颜色等
apply filter to data 数据流处理
split 开启多个窗口
zoom 放大
二、ez-publisher
当你想让某个话题法发布数据又不想写代码、敲命令时,可以选择这个工具
sudo apt-get install ros-melodic-rqt-ez-publisher
rosrun rqt_ez_publisher rqt_ez_publisher
各有千秋:rqt_publisher

2022-08-10
三、rosmon
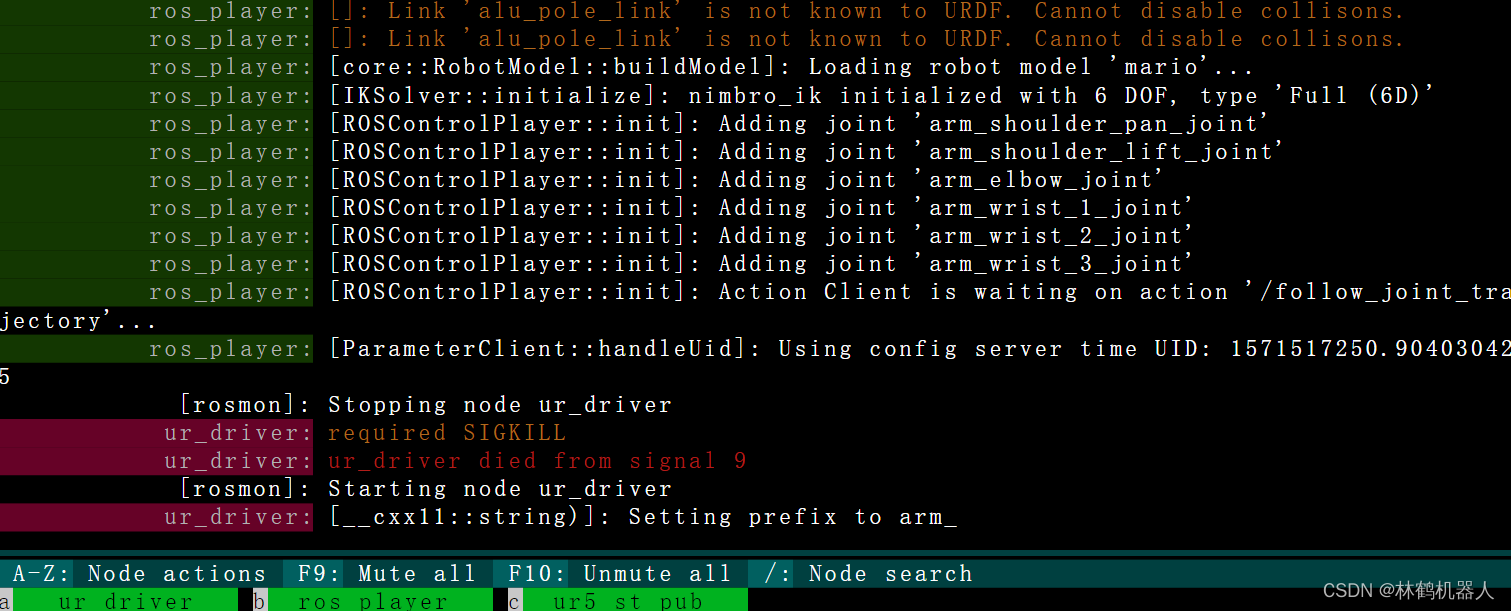
Rosmon 是一个可以代替老式的 roslaunch 工具的插件,它提供了一些有趣的特性,可以用于监视和调试:
- Rosmon 有一个干净、现代的控制台用户界面。只要浏览一下状态栏,您就可以看到所有节点仍然按照它们应该的方式运行。节点的控制台输出将被截获,并使用节点名称进行扩展,从而允许您立即查看哪个节点正在打印该消息。这也适用于没有 Rossole 宏的普通输出
- Rosmon 本身有一个 ROS 接口。使用服务调用查询节点状态或启动/停止节点。这允许您使用 ROS 网络透明性进行远程监视。
- Rosmon 很快。由于参数的惰性计算,对 xacro 和友类的重度调用将尽可能地减少。
安装&启动:
sudo apt-get install ros-melodic-rosmon
roscore #注意,与roslaunch不同的是,必须先启动roscore
mon launch ${package_name} ${launch_name}.launch
更多信息请参考:rosmon - ROS Wiki
各有千秋:roslaunch


















 688
688

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









