






文章目录
论文题目
BundleTrack: 6D Pose Tracking for Novel Objects without Instance or Category-Level 3D Models
概况
- 类别:论文
- 标签:6-Dof、 Object Tracking
- 发表刊物 / 会议 时间:IROS 2021
背景 (说明所做的问题、解决该问题的意义、简述现有方法存在的问题)
1.问题
现有方法:
一般传统思路:
1)Forward Kinematics (FK):直接使用机械臂end-effector位姿代替物体位姿 (some cases),这种方法在抓取上存在无法估计目标姿态的问题
2)Single-image 6D pose estimation:基于 vision 逐帧计算物体 6D 位姿,低效、多余的
- 当前主流方法:
几乎都是基于 instance/category-level 3D models,依赖于且仅能用于一些特定 3D model databases,如 ShapeNet 以及 ModelNet40,无模型的物体从0开始建模需要大量精力,且这些分类需要专家经验 - 另辟蹊径:
受 SLAM 文献启发,tracking-via-reconstruction 类方法不依赖模型,但是随着跟踪进行,误差积累问题很大影响性能
主要创新点(先一句话描述该文所做的事情,再分点讲创新点)
一句话:
提出了位姿图&内存池,全新的6D物体姿态算法,不需要实例或类级别的CAD模型用于训练或测试,可立即用于新物体的6D姿态跟踪
创新点
- 6D物体位姿跟踪算法:不需要实例/类别级物体 CAD 模型,可用于 Novel Objects。综合了 video segmentation, key point detection and matching 等多种方法
- 首次将 memory-augmented pose-graph optimization引入 6D 物体位姿跟踪,借助历史信息解决特征匹配不足和跟踪漂移问题
- 高效的 CUDA 实现,实现算法在线实时运行,达到10Hz。可用于AR/VR,视觉反馈控制操纵,物体级SLAM或动态场景下的 SLAM等。
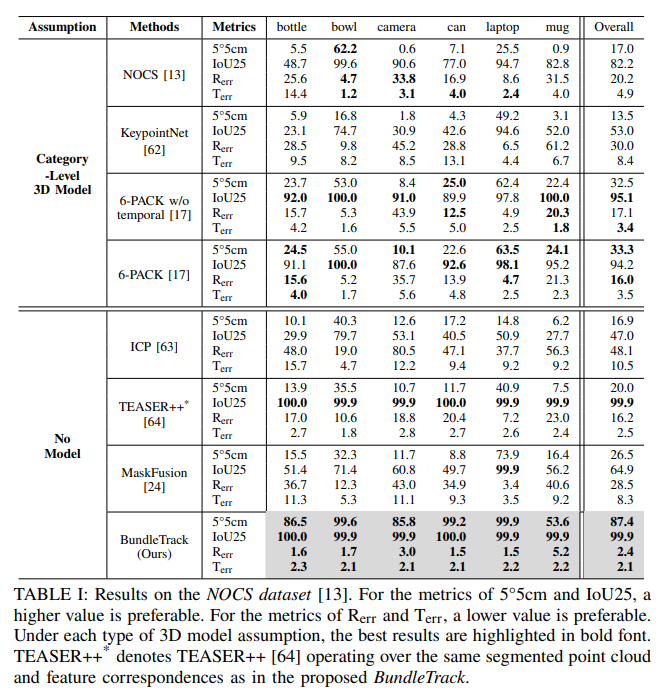
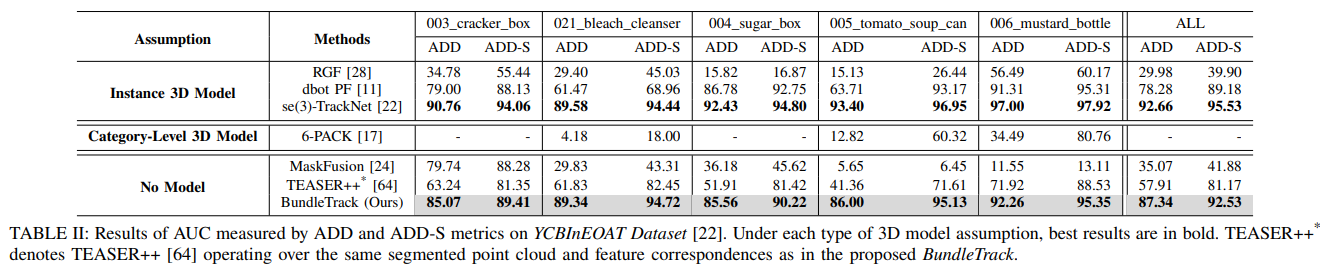
- 在 NOCS 数据集从 33.3% 大幅度提升到 87.4% 。在 YCBInEOAT 数据集 (前作 IROS2020 se (3)-tracknet 提出) 上也达到了跟目前基于CAD模型的领先方法se(3)-TrackNet相近的表现。
方法
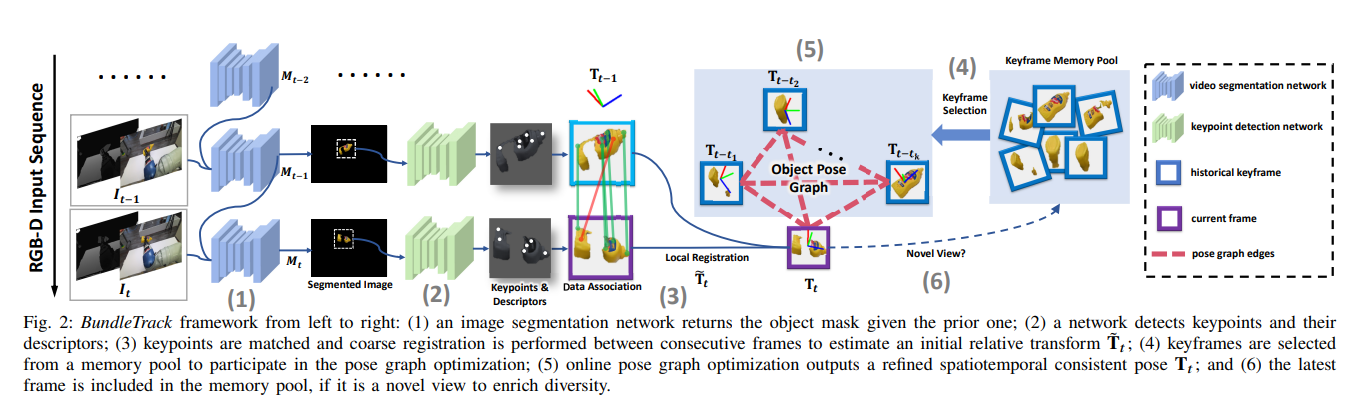
分割–>关键点提取–>关键点匹配得到粗略位姿–>位姿池中找关键帧对粗略位姿进行调整–>得到最终位姿并入池
1.视频分割
采用了现成的用于视频对象分割的 transductive-VOS 网络,只需要在Davis 2017和Youtube-VOS 数据集上预训练,泛化到我们的测试场景,而不需要任何物体的CAD模型进行训练(不依赖,可优化)
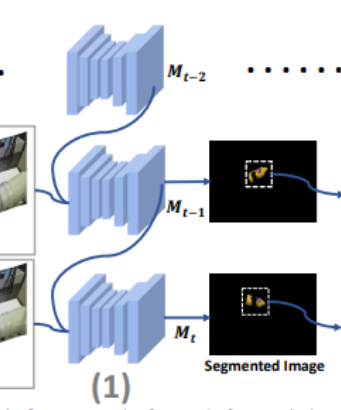
输入:上一帧的掩码Mt-1,当前帧图像It
输出:当前帧掩码Mt
2.关键点提取、匹配

特征点检测:LF-Net,能够平衡性能和推理速度。它只需要对一般 2D 图像进行训练,例如此处使用的 ScanNet 数据集 ,并推广到新的场景。该训练过程不需要收集任何CAD模型,并且一旦训练完成,在所有实验中都不需要finetune。
局部配准:一种数据关联过程包括特征匹配和以 RANSAC 的方式进行异常值修剪识别特征对应。基于这些特征匹配,当前帧与前一相邻帧之间进行初步匹配。可以用闭式求解,估计Tt~用于初始化当前节点 T𝑡作为姿态图优化步骤
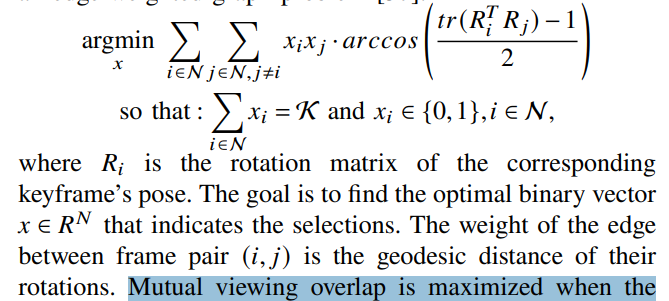
3.关键帧选择
为了确定位姿图中的其余节点,选择不超过K个关键帧从内存池中参与优化。当内存池中的关键帧数量 N 大于 K时,我们需要找到具有最大互视率(当相对于相机的相互旋转差异最小时)的关键帧集重叠以更好地利用多视图一致性。
4.在线位姿优化

对于当前帧和选取到的k个关键帧,可以建立位姿图 G={V,E},其中节点V为这k+1帧的位姿Ti,对于节点之间的边E,有以下两个优化方向:
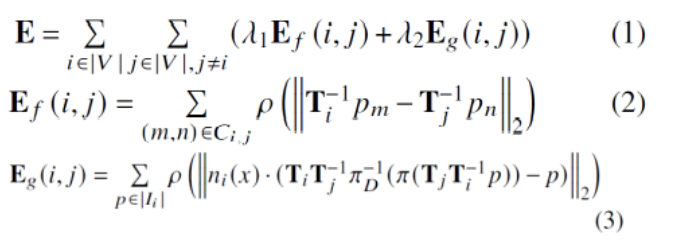
其中Ef考虑对应帧特征的残差,Eg考虑稠密点之间,点到平面距离的残差,当E最小化时,则实现了时空一致性。
这一步是对k+1个位姿都做了优化,而不是只针对当前帧。
5.关键帧memory pool扩增

实验
数据集:
1.NOCS—类级别的静态桌面物体场景。使用5°5cm、IoU25
2.YCBInEOAT—机器人操纵场景下的动态场景。使用ADD/ADD-S曲线下的面积AUC















 2004
2004











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









