










 本文详细介绍了在Ubuntu上安装ROS Noetic的步骤,包括设置ROS源列表、添加秘钥、处理DNS错误、安装依赖及初始化rosdep。在DNS解析出现问题时,提供了更改DNS设置的解决方案,并详述了rosdep的作用、安装与使用,以确保ROS环境的正确建立。
本文详细介绍了在Ubuntu上安装ROS Noetic的步骤,包括设置ROS源列表、添加秘钥、处理DNS错误、安装依赖及初始化rosdep。在DNS解析出现问题时,提供了更改DNS设置的解决方案,并详述了rosdep的作用、安装与使用,以确保ROS环境的正确建立。
1、去ros wiki官网点击install
2、选择相应系统需要的版本(如Ubuntu20.04 需要ROS Noetic Ninjemys版本)
3、点击选择Ubuntu系统
4、按照步骤一步步往下走
1、设置源列表(将ros的deb包下载网址添加到/etc/apt/sources.list.d/ros-latest.list该文件下)
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2、Set up your keys设置秘钥
sudo apt install curl # if you haven't already installed curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
3、出现以下错误
gpg: no valid OpenPGP data found.
4、解决办法
第一步:curl -O https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc //该命令执行后在当前目录下保存一个ros.asc的文件
第二步:sudo apt-key add ros.asc //添加ros.asc
但在执行第一步时出现以下问题:
curl: (7) Failed to connect to raw.githubusercontent.com port 443: Connection refused
问题原因: DNS 服务器在解析时出现了问题
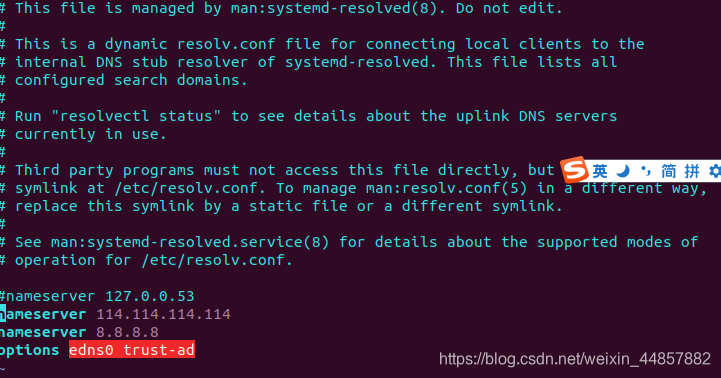
解决办法:更改本机的 DNS 设置(一劳永逸)
如此修改:
sudo vim /etc/resolv.conf
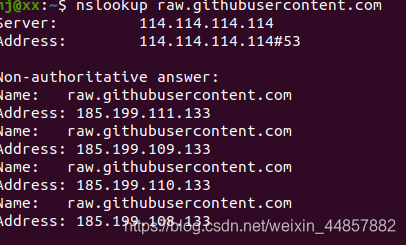
nslookup raw.githubusercontent.com
5、继续从第一步执行,出现接受多少包、时间等不报错,当前目录先生成key:ros.asc,然后执行第二步,添加key
6、更新软件
sudo apt update
7、安装桌面最全版
sudo apt install ros-noetic-desktop-full
8、在当前bash终端添加ros环境
source /opt/ros/noetic/setup.bash
9、将ros环境脚本为每个shell终端配置,使用:
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc //若为zsh则换成~/.zshrc
10、添加依赖
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
11、安装rosdep(rosdep 使您可以轻松地为要编译的源安装系统依赖项,并且需要在 ROS 中运行一些核心组件。 )
sudo apt install python3-rosdep
sudo rosdep init(初始化)//会在/etc目录下生成/ros/rosdep/sources.list.d/20-default.list文件
rosdep update(更新)
sudo rosdep init初始化失败问题怎么解决?
参考链接: https://www.cnblogs.com/JuiceCat/p/12000953.html.
rosdep的作用和用法
rosdep和catkin一样都可以用来构建ros包;
rosdep install PACKAGE_NAME
rosdep的主要用途是安装工作空间中ros包的依赖,首先切换到工作空间下,然后运行下述命令即可安装该工作空间的所有依赖:
rosdep install --from-paths src --ignore-src -r -y

















 4470
4470

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









