







 本文深入探讨了无人机的动态模型,包括刚体运动学与动力学模型,旋翼及电机电调的动力学特性。同时,介绍了姿态表示方法如欧拉角、旋转矩阵和四元数,并对比了它们在SLAM(Simultaneous Localization and Mapping)中的应用。适合对无人机控制和视觉SLAM有兴趣的学习者。
本文深入探讨了无人机的动态模型,包括刚体运动学与动力学模型,旋翼及电机电调的动力学特性。同时,介绍了姿态表示方法如欧拉角、旋转矩阵和四元数,并对比了它们在SLAM(Simultaneous Localization and Mapping)中的应用。适合对无人机控制和视觉SLAM有兴趣的学习者。
本次课涉及的公式的推导详见全权《多旋翼飞行器设计与控制》和高翔等《视觉SLAM十四讲》
作为一个准大三学生学起来下面的公式真的是很有难度,线代很多东西都忘了已经!!!
目录
一、无人机动态模型介绍
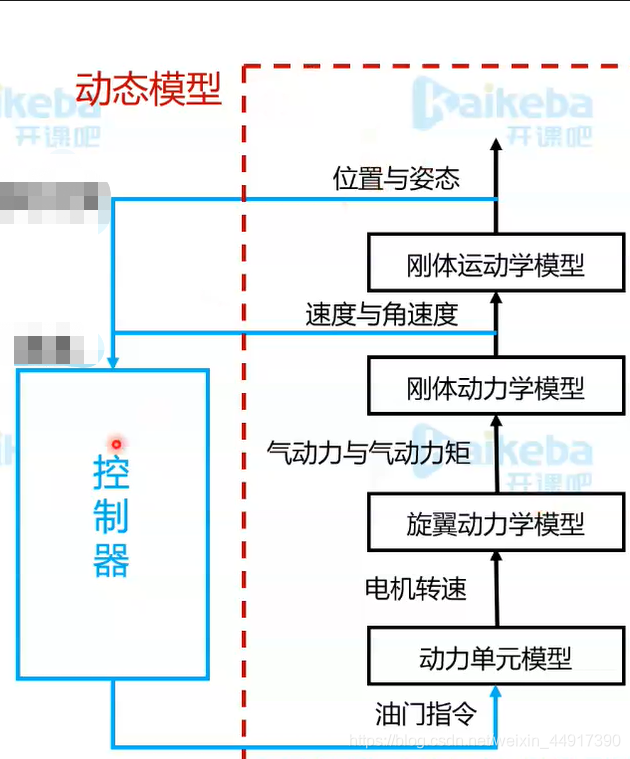
- 动态模型(Dynamic model)
- 数学模型分为静态和动态,动态模型对系统状态随时间变化情况起作用,动态模型通常用微分方程描述
- 刚体运动学模型
- 跟质量、转动惯量与力、力矩无关,只研究位置、速度、姿态、角速度等参量
- 刚体动力学(dynamics)模型
- 研究刚体运动和力和力矩之间的关系
- 旋翼动力学模型
- 这里研究气动力和气动力矩与旋翼转速的关系
- 电机电调模型(动力单元模型)
- 这里研究电机转速与油门指令的关系
二、刚体运动和姿态表示
刚体的位置:通常使用质心的位置表示
刚体的姿态:

- 控制器使用位姿(已知)
- 状态估计器估计位姿(未知)
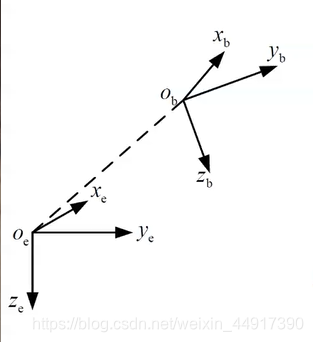
地球坐标系与机体坐标系
- 惯性(inertial)/地球(earth)/世界(world)坐标系:静止不动的参考坐标系
- 机体(body)/相机(camera)坐标系:运动的坐标系
- 我们用机体坐标系相对地球坐标系的相对运动来表示机体在三维空间的运动
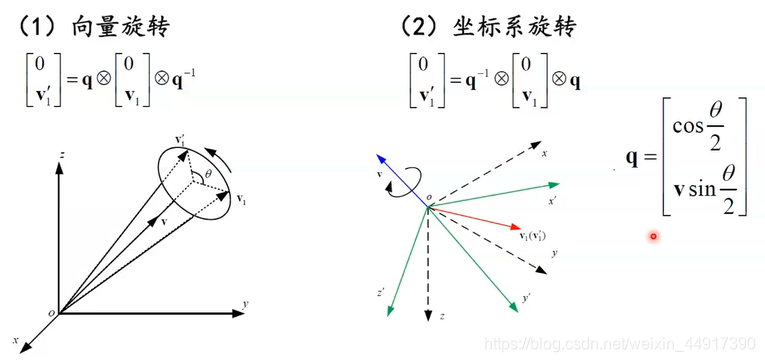
坐标系旋转与向量旋转的区别
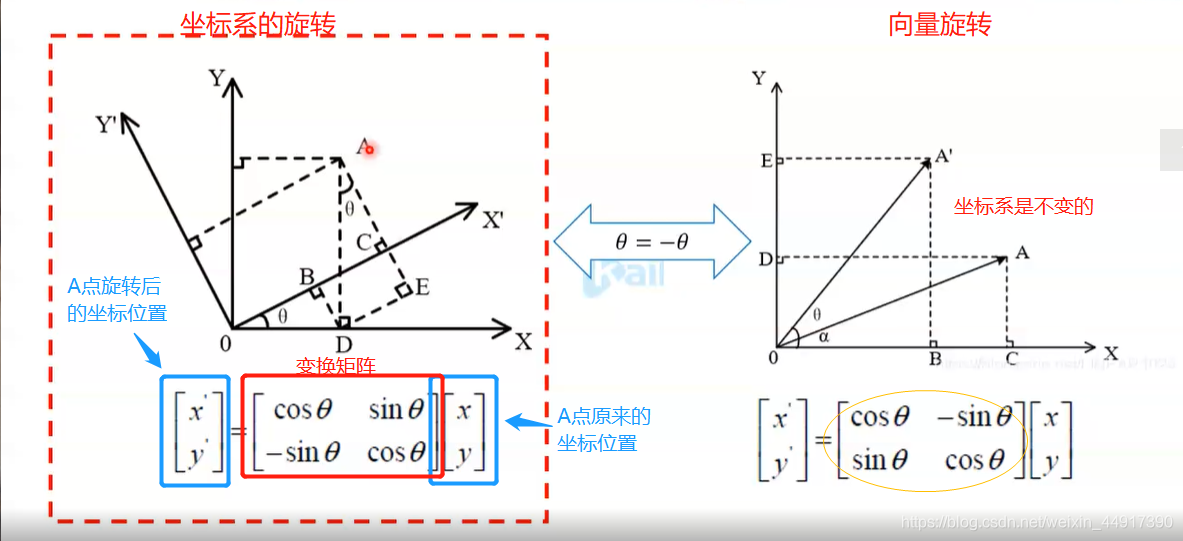
*可看作是正转和反转所以差了一个负号
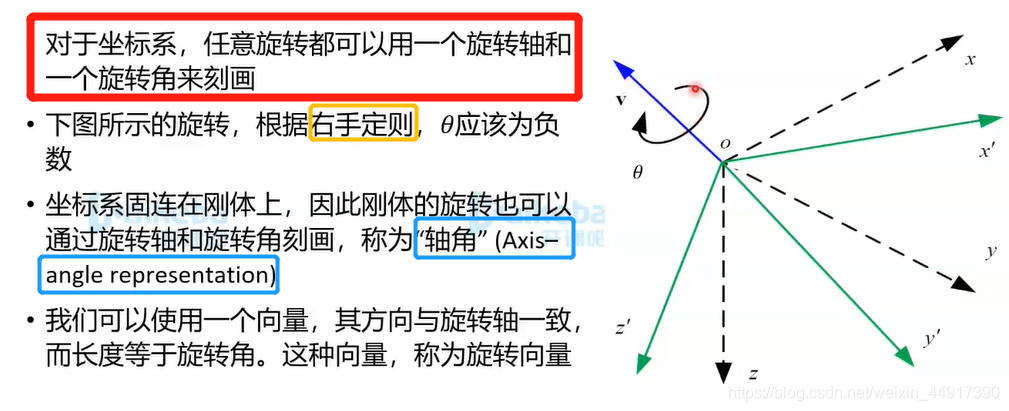
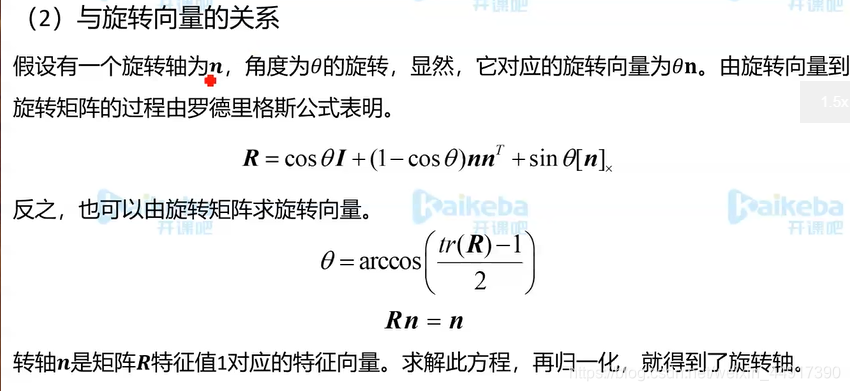
旋转轴与旋转角
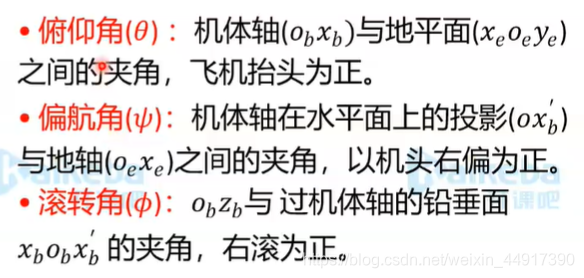
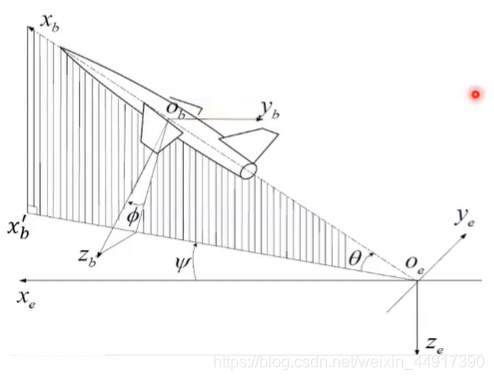
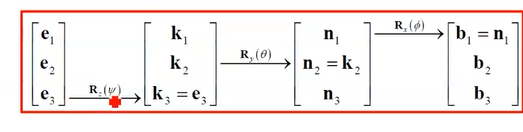
欧拉角
定义:航空惯例(好理解一点)
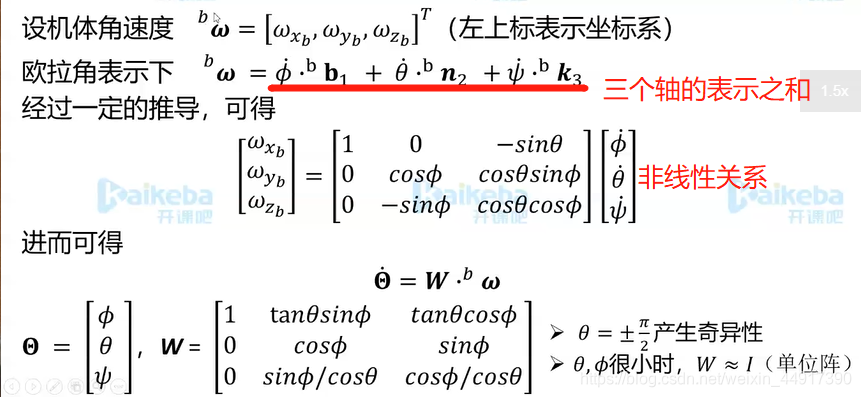
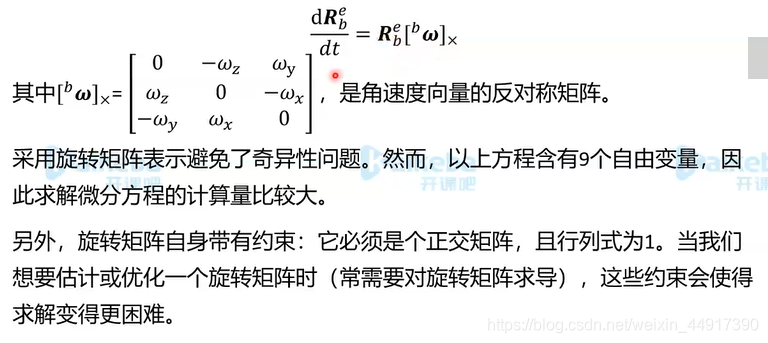
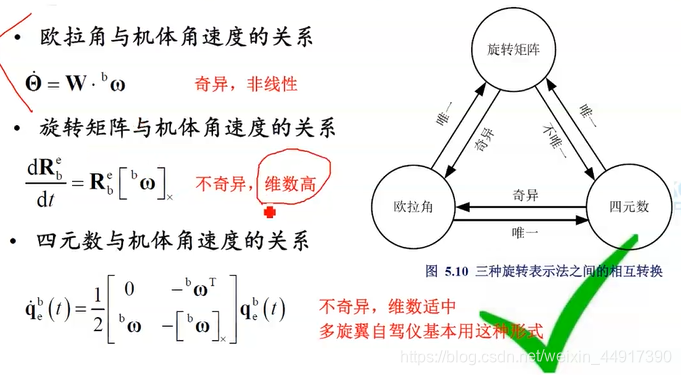
与角速度的关系
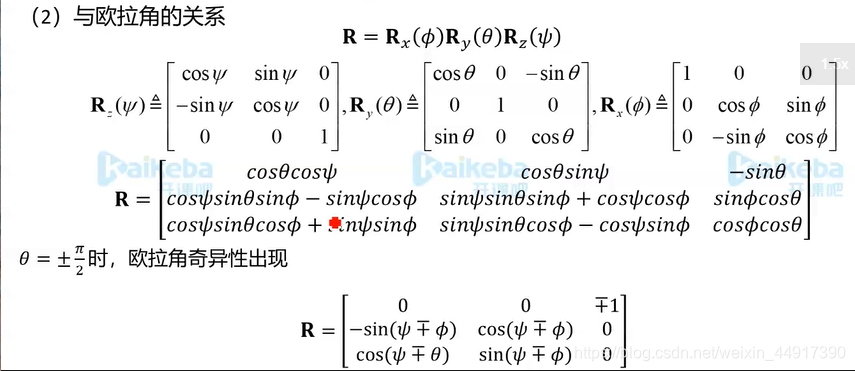
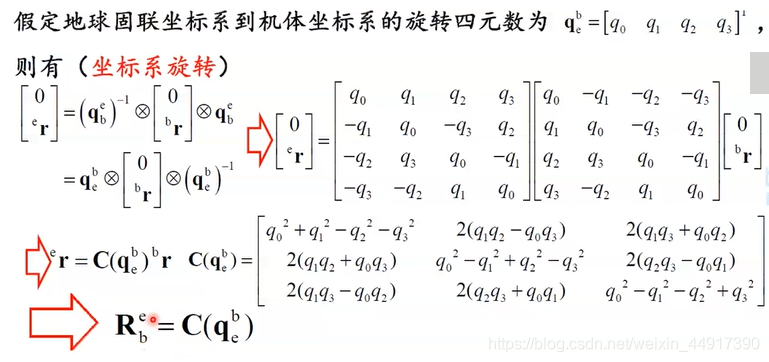
旋转矩阵
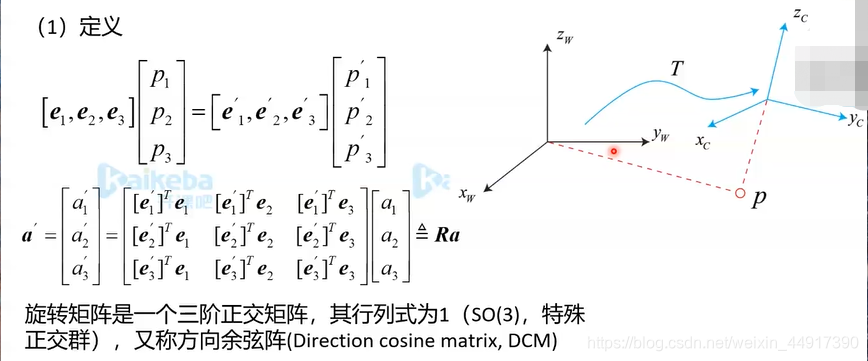
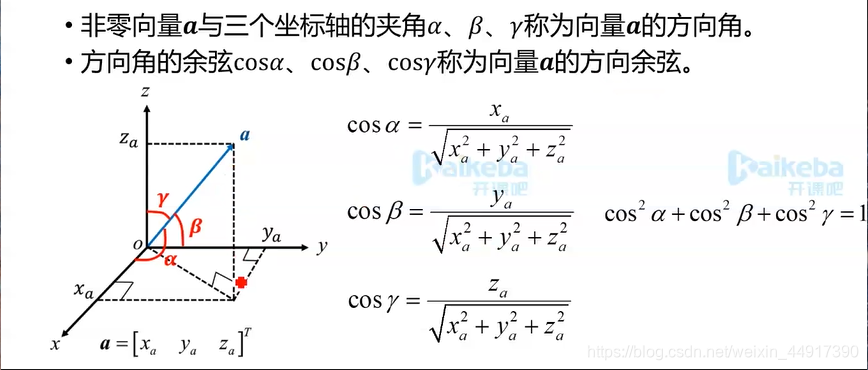
补充:方向余弦阵
四元数
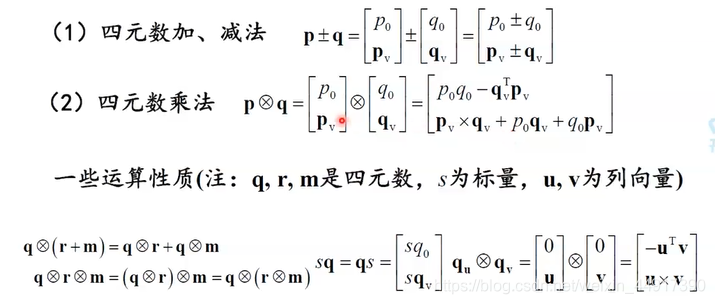
定义

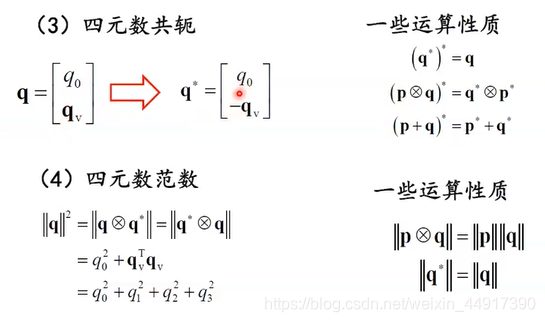
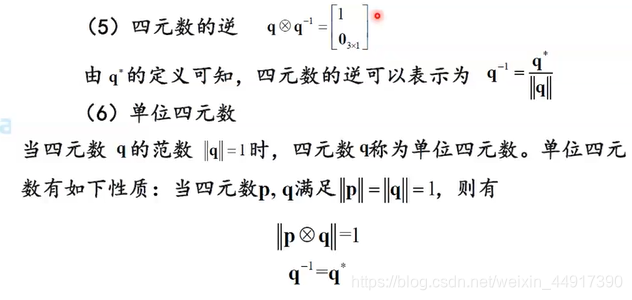
基本运算法则
旋转表示
与旋转矩阵转换
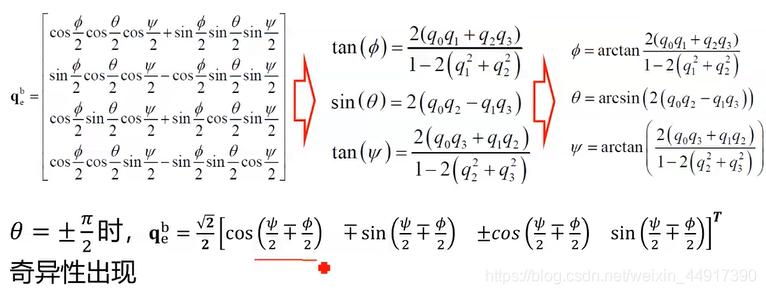
与欧拉角之间关系
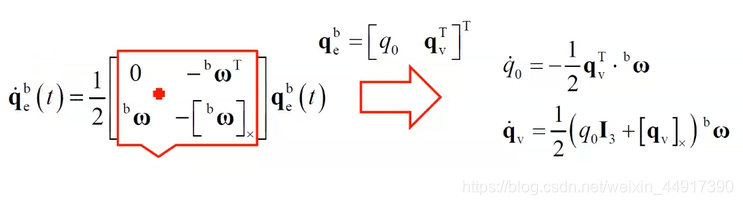
与角速度的关系
三种姿态表示总结
三、无人机刚体模型
- 无人机是刚体,在振动问题中认为无人机是弹性体
- 质量和转动惯量是不变的,对于农用无人机、消防无人机等假设不成立
- 无人机几何中心和重心一致,如果实际不一致,后面的模型需要修改
刚体运动学模型
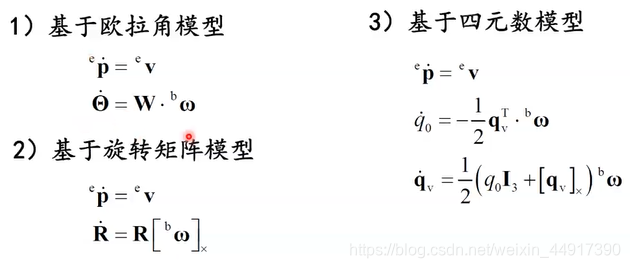
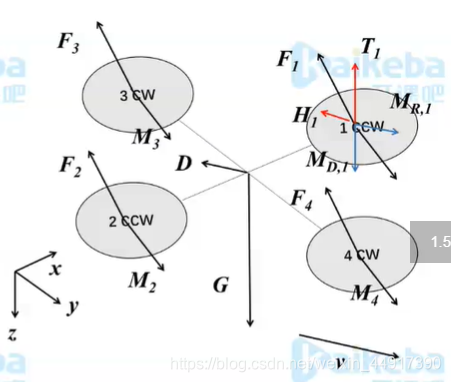
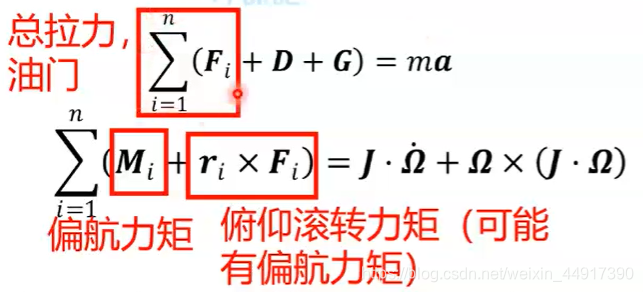
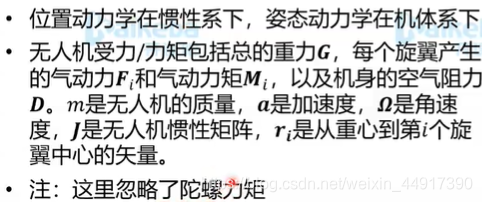
刚体动力学模型
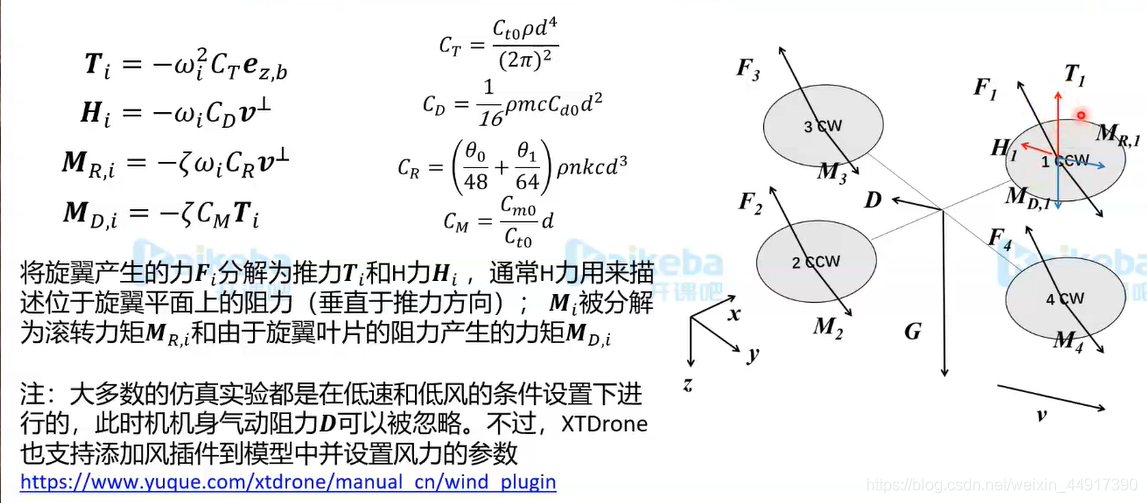
四、旋翼动力学模型
五、电机电调模型(动力单元模型)

*一般悬停只要取到油门百分之50即可

















 575
575

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









