







1、旋转
- 旋转矩阵(Rotation matrices)
- 欧拉角(Euler angles)
- Axis angle parameterization
- 指数坐标(Exponential coordinates)
- 四元数(Quaternions)
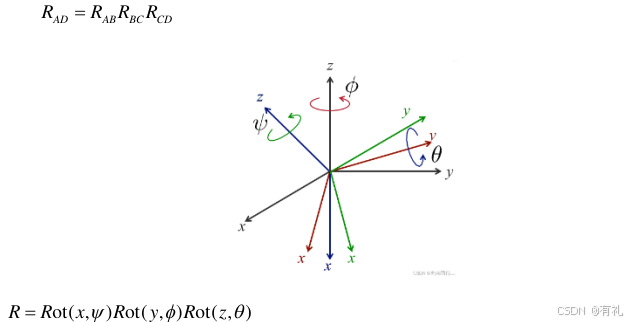
1.1、欧拉角
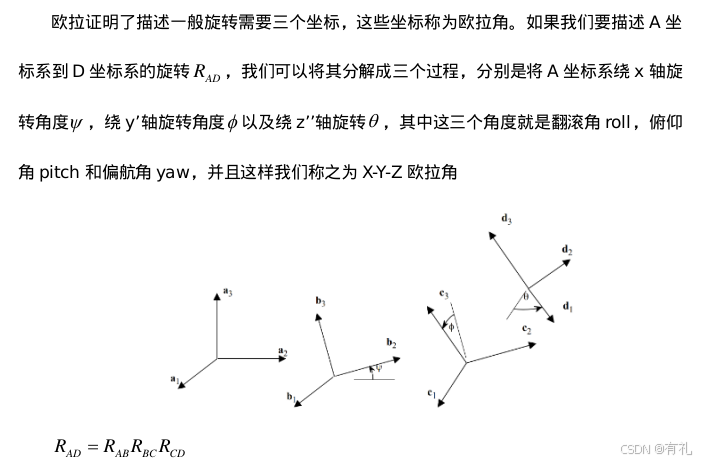
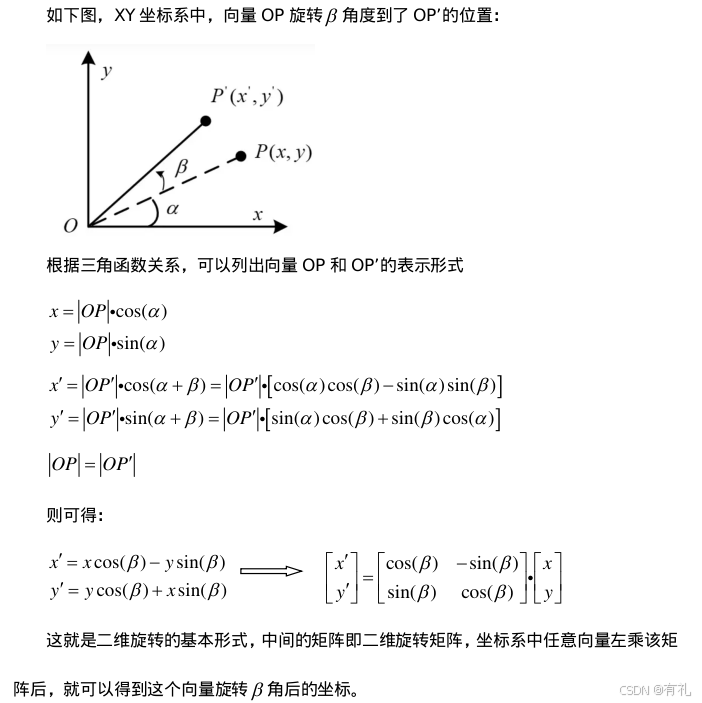
1.2向量旋转
1.2.1 平面二维旋转
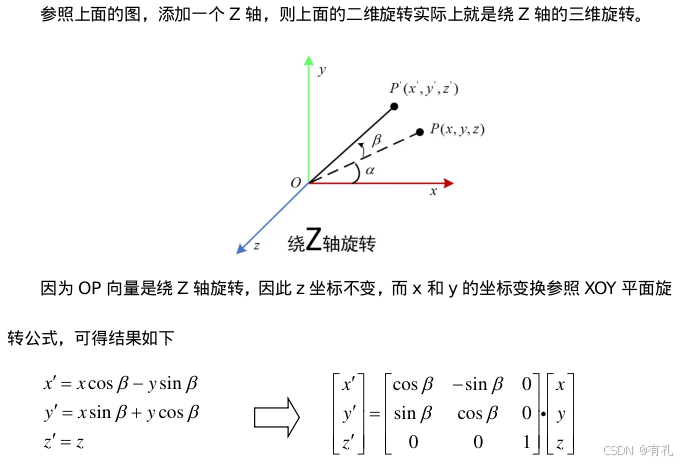
1.2.2三维旋转
(1)绕z轴
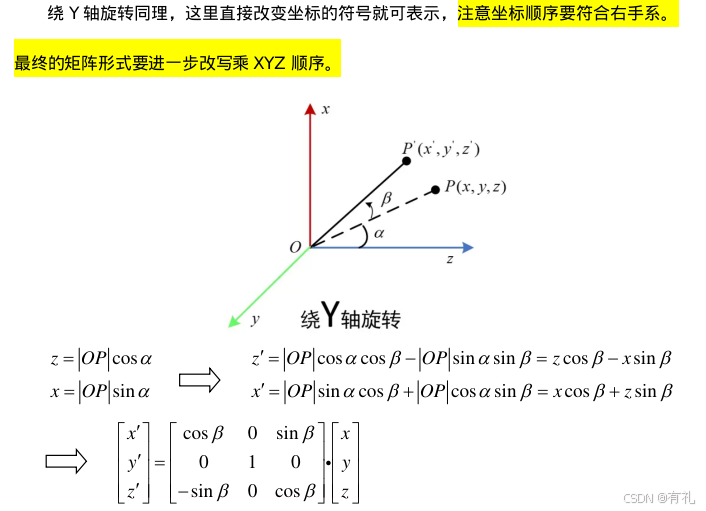
(2)绕Y轴
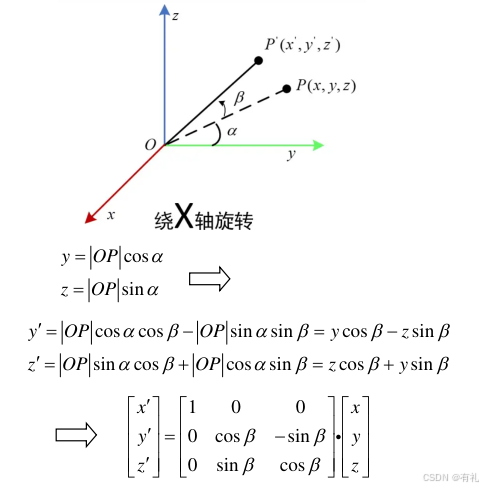
(3)绕X轴
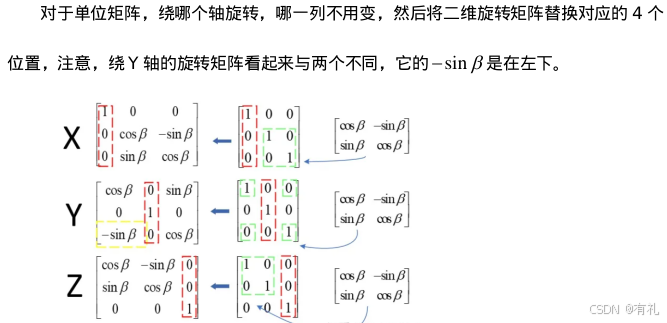
1.2.3、助记
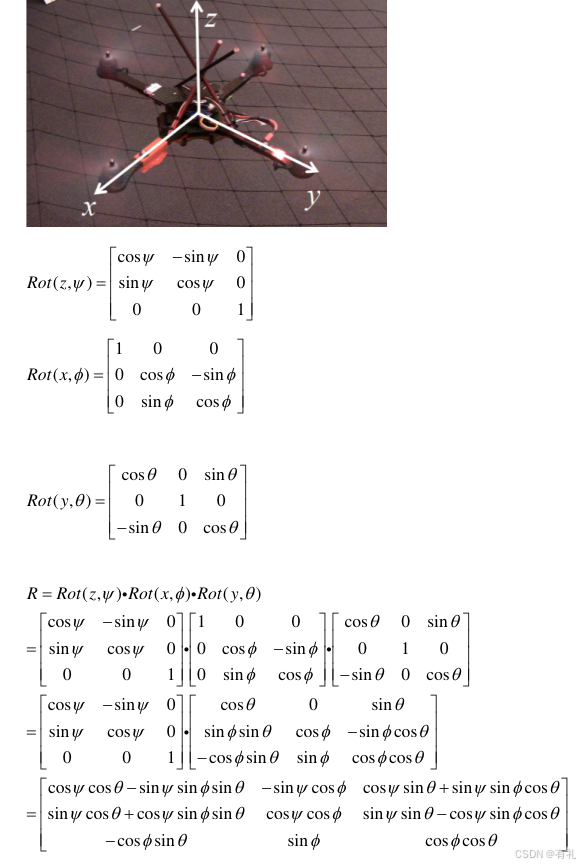
2、Z-X-Y欧拉角
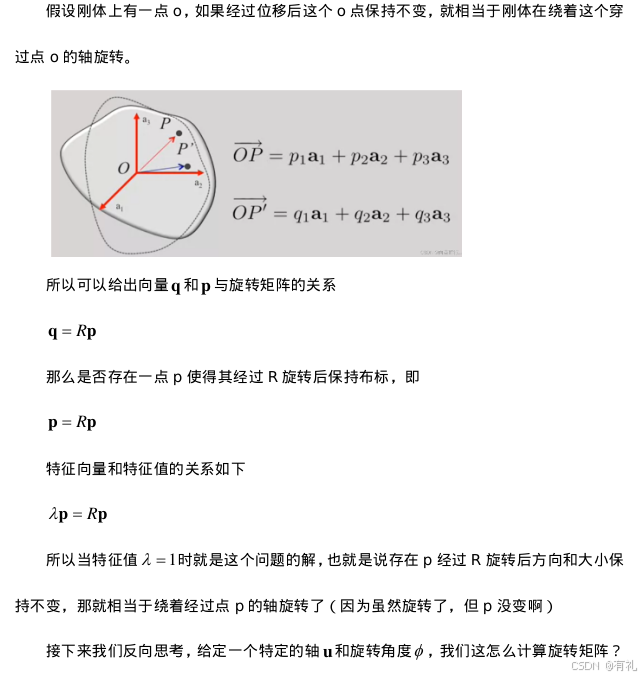
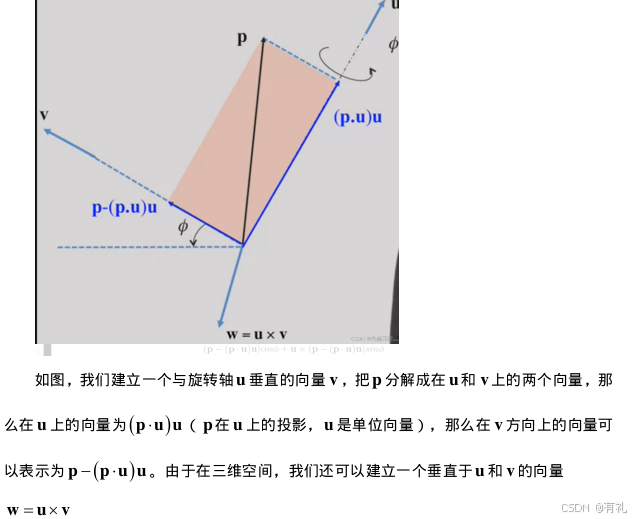
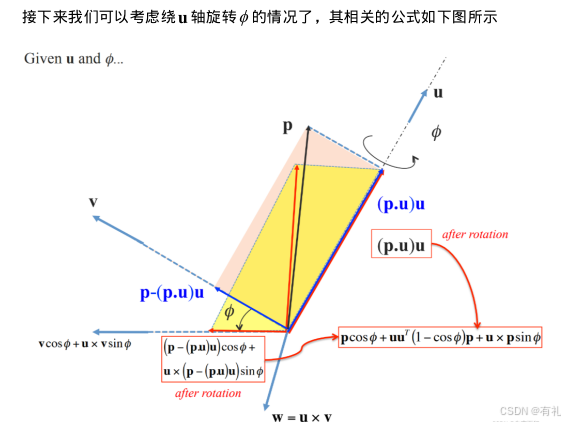
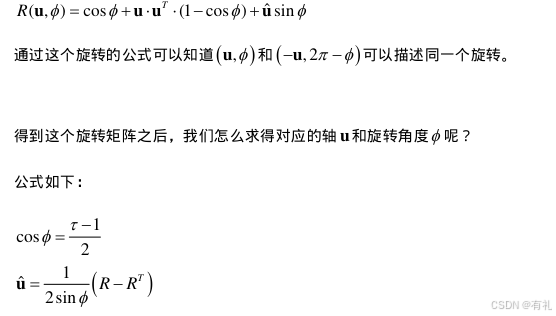
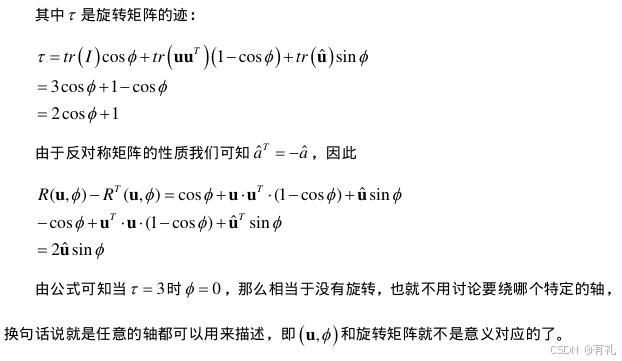
3、角轴旋转表示

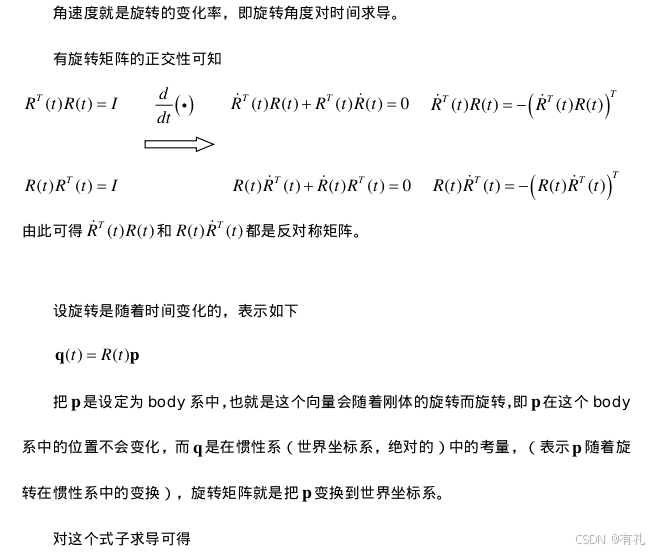
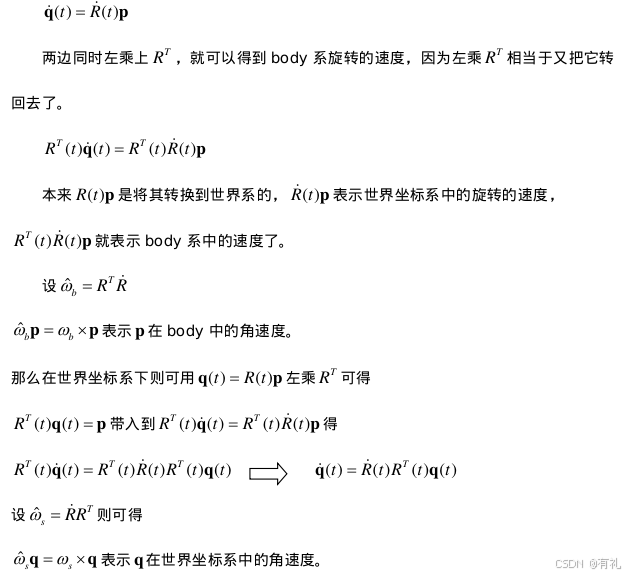
4、角速度
(1)绕z轴
(2)绕Y轴
(3)绕X轴
 1277
1430
1277
1430

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























