







本文主要介绍前向碰撞预警系统 FCW 设计依赖的两个标准:ISO 22839-2013 、 ISO 15623-2013。
第一部分 ISO 22839-2013
Intelligent transport systems - Forward vehicle collision mitigation systems - Operation, performance, and verification requirements
ISO 22839-2013 :智能交通系统 — 前向车辆碰撞缓解系统 FVCMS — 操作、性能和验证要求。
1. 介绍
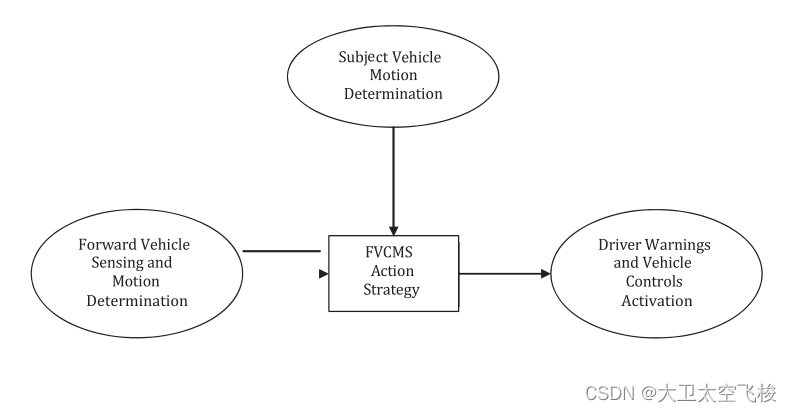
Forward Vehicle Collision Mitigation Systems (FVCMS) reduce the severity of forward vehicle collisions that cannot be avoided, and may reduce the likelihood of colision with forward vehicles. FVCMS require information about range to forward vehicles, motion of forward vehicles, motion of the subject vehicle, drive commands and driver actions. FVCMS detect vehicles ahead, determine if detected vehicles represent ahazardous condition, and warn the driver if a hazard exists. They estimate if the driver has an adequate opportunity to respond to the hazard. lf there is inadequate time available for the driver to respond, and if appropriate criteria are met, FVCMS determine that a collision is imminent. Based upon this assessment, the FVCMS will activate vehicle brakes to mitigate collision severity.
2. FVCMS 分类
本条款提供了介绍性信息,解释了本国际标准所涵盖的 FVCMS 的不同分类。本条款不是用来定义要求的。所有要求本标准出现在后面相应章节。
2.1 按曲线半径分类
根据曲线半径能力对系统进行分类:
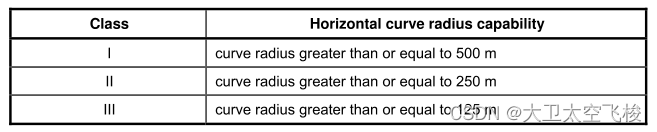
I 级系统应具有探测目标车辆轨迹中半径小于 500 米的前方障碍物车辆的能力
II 级系统应具有探测目标车辆轨迹上半径小于 250 米的前方障碍物车辆的能力
III 级系统应具有检测目标车辆轨迹上半径小于 125 米的前方障碍物车辆的能力
2.2 按应对策略分类
FVCMS 可以根据所提供的对策进行分类。分类是基于最低限度的对策和可能提供的额外对策。每个对策都有一个相关的最小对策实施点(MCAP)。当碰撞前紧急性参数(PUP)至少等于该对策的最小对策实施点时,FVCMS 激活该对策。
碰撞警告(CW)对策
碰撞警告是一种基于听觉、视觉和触觉或触觉感官模式的组合的警告,符合 ISO 15623 对 FVCMS操作范围的要求。碰撞警告对策应在 SRB 或 MB 启动之前发生。
减速制动(SRB)对策
减速制动是一种自动制动功能,旨在降低目标车辆的速度。SRB 为驾驶员提供了更好的机会来应用手动紧急制动,进行紧急变道,或确定不存在危险并解除 SRB。任何这些操作都可能阻止 MB 激活。为了帮助乘客为该制动事件做好准备,SRB 启动之前会有碰撞警告对策。如果 MB 处于激活状态,则不会启动 SRB。
缓解制动(MB)对策
缓解制动是指当碰撞看起来不可避免时施加的自动制动。如果PUP至少等于阈值 MCAPMB,则将启动 MB。缓解制动措施的激活将产生比 SV 和 TV 在没有任何缓解措施的情况下发生碰撞时破坏性更小的碰撞。在某些情况下,它还可能导致自动避免碰撞。MB启动之前将启动碰撞警告对策,并可选择启动 SRB。
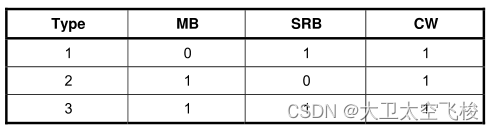
组合策略
FVCMS 的可能配置如下表2所示。每一行代表一个不同的系统类型。本表中未确定的任何组合不在本国际标准的范围内。对于每种类型,该行指示需要哪些对策。“1” 表示需要对策,“0” 表示不应包括对策。
3. 功能要求
3.1 最低启用能力
FVCMS 性能的定义要求主体车辆至少配备一种装置,用于实现每个必要的系统功能。所有FVCMS 应根据ISO 15623 为 FVCMS 的操作范围提供 CW 。
轻型车辆的必要功能
配备 FVCMS 的轻型车辆应能够实现以下功能:
-检测前方车辆的存在
-确定 SV 和检测到的前方车辆之间的距离和接近速度
-确定目标车辆速度
-当横向偏移小于 20% 时,启动适当的 FVCMS 对策,即使来自 SV 传感器的 TV 被部分遮挡
-根据 FVCWS 要求提供驾驶员警告
-激活和调节制动器,无论驾驶员是否已经在制动
-控制制动灯
-基于具有偏航稳定性能力和管理纵向车轮打滑能力的制动器,例如必要时结合 ABS 能力的 ESC 或 RSC 系统,增强驾驶员控制
-在 2 型和 3 型系统的 MB 事件期间至少产生所需的最小 FVCMS 减速度
-具有为 1 型或 3 型系统提供 SRB 制动轮廓的能力
-在 MB 或 SRB 启动后,允许驾驶员将减速度增加到任何更高的值,直到车辆可能的最大减速度
重型车辆的必要功能
配备 FVCMS 的重型车辆应实现与轻型车辆相同的功能,但增加了以下功能:
FVCMS 对策不应导致千斤顶断裂(在驾驶室和拖车形成 “V” 形之前,铰接车辆在驾驶室与拖车之间的连杆处折叠)。
3.2 运行模型-状态转换图
FVCMS 应按照下图的状态转换图运行。除了以下所示之外,状态转换的具体实施留给制造商。
PS:章节有点变化,请参照原因为文档。
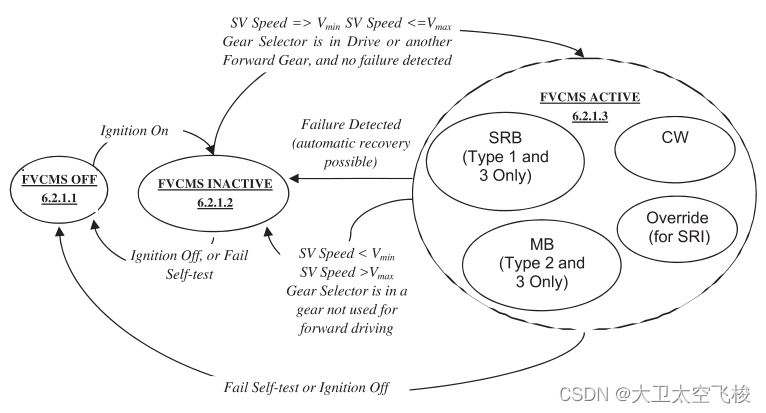
根据以上状态转换图,FVCMS 可以选择性地发挥作用。除了以下所示之外,状态转换的具体实施留给制造商。
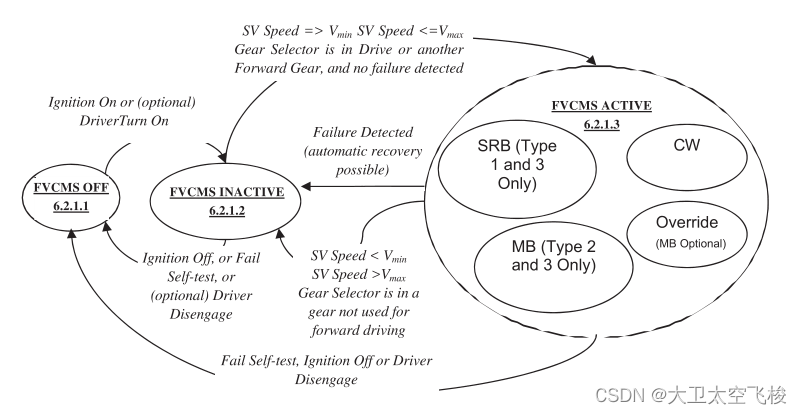
3.2.1 FVCMS 关闭
在 FVCMS 关闭状态下不执行任何对策。将点火开关转到关闭位置后,FVCMS 应转换到 FVCMS 关闭状态。当自检功能确定 FVCMS 无法提供足够的性能时,或者当驾驶员手动断开 FVCMS(可选)时,应转换到 FVCMS 关闭状态。当车辆打开时,FVCMS 可能处于 FVCMS 关闭状态
3.2.2 FVCMS 未激活
在 FVCMS 非激活状态下,FVCMS应监测车速和档位状态,并确定是否适合激活系统。如果点火循环已完成且发动机正在运行,则 FVCMS 应从 FVCMS 关闭状态进入 FVCMS 非激活状态。如果不满足激活条件,FVCMS 应从激活状态进入该状态。例如,如果车速降至 Vmin 以下,则选择倒车档或选择驻车档。根据诊断自检的结果,可以恢复所有或部分对策的功能。如果遇到制造商定义的故障模式,可以自动恢复(可选),则 FVCMS 应从 FVCMS 活动状态转换为 FVCMS 非活动状态。一旦恢复发生,系统可以转换回 FVCMS 活动状态。最后,如果驾驶员手动启用 FVCMS (可选),则应从 FVCMS 关闭状态转换为 FVCMS 非活动状态。
3.2.3 FVCMS 激活
FVCMS 在激活时应监测触发条件,从而选择适当的对策,并决定激活或选择性地超控对策。如果发生系统故障或无法执行对策,如果可以从故障中自动恢复,则 FVCMS 应转移到 FVCMS 非活动状态。如果系统自检失败(不可能在没有驾驶员干预的情况下自动恢复),FVCMS 应转换到FVCMS 关闭状态。将这些故障通知给驾驶员的方式由制造商决定。如果档位选择处于驱动或任何向前运动选择,且车速大于或等于 Vmin 且小于 Vmax,则 FVCMS 应进入该状态。
3.3 性能要求
3.3.1 目标车辆
FVCMS 应根据检测到的拟在公共道路上使用的可获得许可的机动车辆,即摩托车、轿车、轻型卡车、公交车、客车和其他重型车辆,在需要时提供对策措施车辆。FVCMS 可以选择性地检测较小的目标,例如行人和人力自行车。
3.3.2 碰撞类型
FVCMS 应在所有目标车辆的追尾碰撞场景中发挥作用。
3.3.3 运行速度
运行速度和相对速度限制如下图所示。粉红色区域(斜线上方的阴影区域)表示有条件的运行条件;绿色区域(斜线下方的阴影区域)为可运行区域;并且颜色为灰色的区域是必须操作的条件。主体车辆和目标车辆的最大运行速度上限留给制造商。
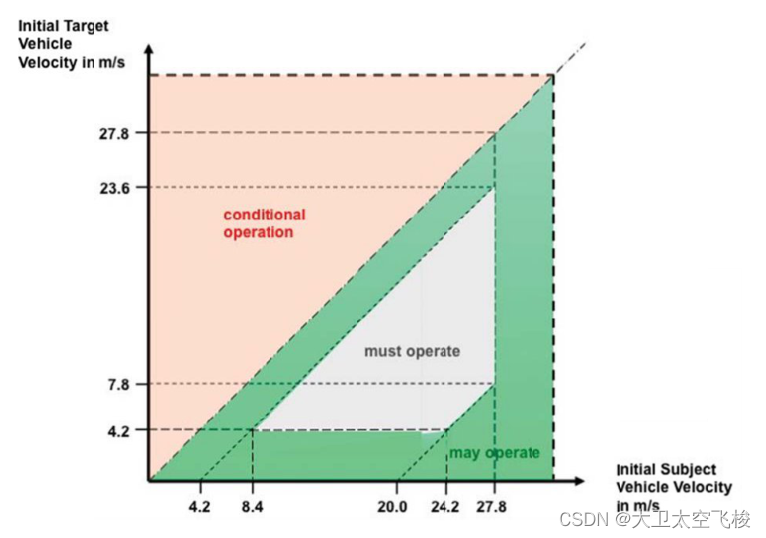
主体车辆-最低目标车速:
1.所有 FVCMS 的 Vmin 应小于等于 8.4 m/s(30 km/h)。
2.如果目标车速降至 Vmin 以下且缓解制动未进行,则 FVCMS 应进入非激活状态。Vmin的值应在车主手册中声明。
主体车辆-最大目标车速:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 3671
3671











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











