







 nuScenes数据集为自动驾驶研究提供了全面的评估标准,包括mAP、mATE、mASE、mAOE、mAVE和mAAE等指标,关注检测精度、定位、尺度、角度、速度和属性等方面的误差。此外,数据集涵盖了360度视野的多传感器融合,23类物体的3D标注,以及关键的长尾分布问题,为解决类不平衡和复杂场景理解带来了挑战。
nuScenes数据集为自动驾驶研究提供了全面的评估标准,包括mAP、mATE、mASE、mAOE、mAVE和mAAE等指标,关注检测精度、定位、尺度、角度、速度和属性等方面的误差。此外,数据集涵盖了360度视野的多传感器融合,23类物体的3D标注,以及关键的长尾分布问题,为解决类不平衡和复杂场景理解带来了挑战。
评价指标:
以bevdet论文为例:
mAP:
在评测时依旧使用目标检测中常用的的AP,不过AP的阈值匹配不使用IoU来计算,而使用在地平面上的2D中心距离d来计算。这样解耦了物体的尺寸和方向对AP计算的影响。d设置为{0.5,1,2,4}米。在计算AP时,去除了低于0.1的recall和precision并用0来代替这些区域。不同类以及不同难度D用来计算mAP:
(This is done in order to decouple detection from object size and orientation but also because objects with small footprints, like pedestrians and bikes, if detected with a small translation error, give 0 IOU. This makes it hard to compare the performance of vision-only methods which tend to have large localization errors )

mATE:
Average Translation Error,平均平移误差(ATE) 是二维欧几里德中心距离(单位为米).
mASE:
Average Scale Error, 平均尺度误差(ASE) 是1 - IoU, 其中IoU 是角度对齐后的三维交并比
mAOE:
Average Orientation Error.平均角度误差(AOE) 是预测值和真实值之间最小的偏航角差。(所有的类别角度偏差都在360∘度内, 除了障碍物这个类别的角度偏差在180∘ 内)
mAVE:
Average Velocity Error.平均速度误差(AVE) 是二维速度差的L2 范数(m/s)。
mAAE:
Average Attribute Error,平均属性错误(AAE) 被定义为1−acc, 其中acc 为类别分类准确度。
NDS:
对于每个TP指标,我们计算所有类别的平均TP(mTP):

对于每个TP 度量,我们计算所有类的平均TP 度量(mTP),并且所有的TP 指标使用 = 2 米的中心距离计算。
除了mAP外,nuScenes还提出了一个指标NDS,该指标使用truth positive(TP)指标计算出来。
NDS一半基于检测性能(mAP),而另一半基于检测性能根据位置、大小、方向、属性和速度度量的检测质量(ATE,ASE,AOE,AVE,AAE)。由于mAVE、mAOE和mATE可以大于1,我们在(3)中将每个度量限制在0和1之间。

其他相关
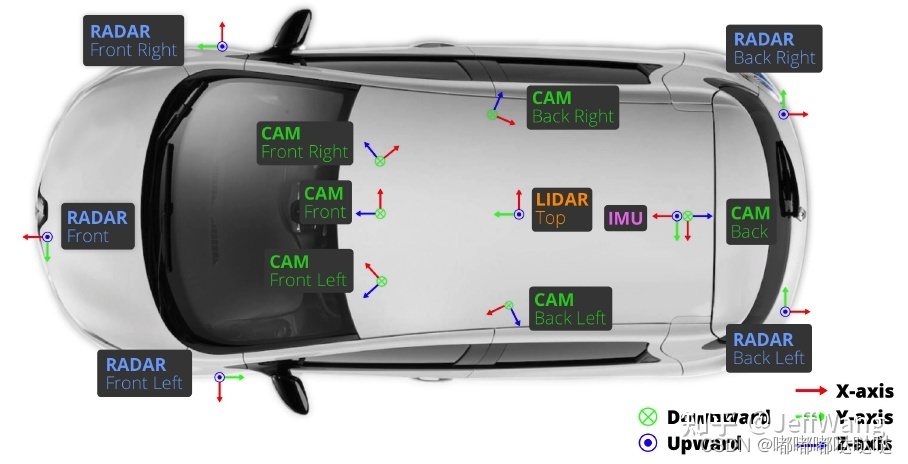
传感器的配备
6个相机、一个LiDAR、5个RADAR
如下图所示。值得注意的是,相比KITTI和Waymo,nuScenes提供了360度的相机视野,所以该数据集可以用来做360度场景的多传感器融合。
数据标注
对于每一个场景,知选择其中的关键帧做标注,标注速率在2Hz,总共标注了23类物体的3D bbox(x,w,z,w,l,h,yaw)、类别信息、以及其他的一些属性(可见度、状态)。
对于物体检测问题,对于t时刻的场景,我们可以使用[t-0.5,t]内的传感器数据去检测场景内的物体。并且我们只是选择了23种物体中的10种作为检测对象。他们分别是Car Pedestrian Bus Barrier Traffic cone. Truck Trailer Motorcycle. Constructions. Bicycle。
值得注意的是,由于标注了23类物体,所以class-imblance问题会更加严重,在nuScenes中最大的物体标注imblance为1:10k,而在KITTI中只是1:36。这让研究者可以探讨长尾分布问题。

















 217
217

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









