







 本文详细介绍了步进电机的工作原理、关键参数及其在数字设备中的应用。涵盖了步进驱动系统的组成,包括步进电机和驱动器,以及脉冲量信号如何控制电机的角位移或线位移。深入探讨了步进电机的选型、控制原理、常见问题及解决方案。
本文详细介绍了步进电机的工作原理、关键参数及其在数字设备中的应用。涵盖了步进驱动系统的组成,包括步进电机和驱动器,以及脉冲量信号如何控制电机的角位移或线位移。深入探讨了步进电机的选型、控制原理、常见问题及解决方案。
参考文献
[1] 向晓汉, 宋昕. 变频器与步进/伺服驱动技术完全精通教程[M]. 第1版. 北京:化学工业出版社, 2015.
——
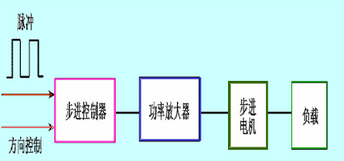
1步进驱动系统
步进驱动系统包含步进电动机和步进驱动器。
脉冲量信号和电平形式的开关量类似,当开关量按一定频率变化时,则该开关量就可以视为脉冲量,即脉冲量具有周期性。
步进电机是将电脉冲信号转变为角位移或线位移以控制转子转动的开环控制电机(可以通过安装编码器形成闭环系统),它旋转是以固定的角度(步距角)一步一步运行的,故称步进电机。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,因此具有较高的定位精度。
步进驱动器(步进驱动电源)向电动机绕组提供脉冲电流,步进电动机的运行性能决定于电动机与步进驱动器的良好配合。
步进驱动系统多用于数字式计算机的外部设备,如打印机、绘图机和磁盘等装置。
电机的响应仅由数字输入脉冲确定,因而可以采用开环控制,这使得电机的结构可以比较简单而且控制成本。
2关键参数
2.1步进电机关键参数
- 电压
- 相数:电机相数不同,其步距角也不同。如果使用细分驱动器,则‘相数’将变得没有意义,用户只需在驱动器上改变细分数,就可以改变步距角。
- 拍数:通常等于相数或其整数倍,指电机转过一个齿距角所需脉冲数。
任意圆周上相邻两齿同侧齿廓之间的弧线长度称为该圆周上的齿距(pitch)。注意与步进角的区分。

- 步距角(即固有步距角):当步进驱动器接收到一个脉冲信号,它所驱动步进电机按设定的方向转动的一个固定角度,在未细分的情况下,θ=360°/(转子齿数*运行拍数)。步距角越小,控制精度越高。
- 步距角精度:步进电机每转过一个步距角的实际值与理论值的误差,不累积,值为误差/步距角*100%,约3%~5%。
- 保持转矩(静转矩):指步进电机通电但没有转动时,定子锁住转子的力矩。
- 定位转矩(钳制转矩):电机在不通电状态下,定子锁住转子的力矩。
- 尺寸
- 失步:电机运转时运转的步数,不等于理论上的步数。
- 失调角:转子齿轴线偏移定子齿轴线的角度。
步进电机由于其特点广泛应用于各种开环控制系统中。
2.2驱动器关键参数
- 输入电压:步进电机电流一定时,供给驱动器的电压值越高,步进电机能产生的力矩越大,但电机发热也会随之增加。
- 输入电流
- 最大功耗
- 输出电流:可由拨码开关选择
- 细分:可由拨码开关选择,步进电机通过细分驱动器的驱动,其步距角变小。此时步距角=电机固有步距角/细分数。有整步、半步、4细分、8细分、16细分、32细分、64细分等,并非越大越好,示实际情况而定。步进电动机的细分控制本质上来讲是对步进电机励磁绕组中电流的控制。
采用细分驱动技术可以提高步进电机步距分辨率,减小转矩波动,避免低频共振及降低运行噪声。
当设置为8细分时, 在步进电机驱动器的步进脉冲输入口输入一个脉冲, 步进电机仍是走一步, 相当于原来的1/8步。
2.3步进电机的选型
关注以下三类参数:
- 电动机最大速度选择
- 电动机定位精度选择:即步距角和驱动器细分等级
- 电动机力矩选择:由于难以确定动态力矩,往往先确定静力矩
3步进电机控制原理
3.1步进电机驱动器
步进电机的使用必须配合步进驱动器。
步进电机驱动器是一种能使步进电机运转的功率放大器,能把控制器(通常为PLC)发来的脉冲信号转化为步进电动机的角位移。它输出的角位移与输入的脉冲数成正比,转速与脉冲频率成正比。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(步进角)。通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;通过控制脉冲频率来控制电机转动的速度和加速度,从而达到精确调速的目的;改变通电顺序,可以改变其正反转。
该过程可通过软件或硬件完成分配。
3.2步进电机的拍
步进电机的拍指对绕组的通电状态,一拍指从一种通电状态变为另一种通电状态。步进电机可工作于单相通电模式、双相通电模式以及单相、双相交叉通电模式。在拍数中,单指每次只给一相绕组通电,双指每次给两相绕组通电。
当对步进电机施加一系列连续不断的控制脉冲时,它可以连续不断地转动。每一个脉冲信号对应步进电机的某一相或两相绕组的通电状态改变一次,也就对应转子转过一定的角度(一个步距角)。当通电状态的改变完成一个循环时,转子转过一个齿距。
3.2.1四相步进电机拍数
以四相步进电机为例,常见的逆时针通电方式有单四拍(A-B-C-D-A),双四拍(AB-BC-CD-DA-AB),四相单双八拍(A-AB-B-BC-C-CD-D-DA-A)。步进电机的正反转控制,实际上是通过改变通电顺序实现的。
三相步进电机则为单三拍(A-B-C-A),双三拍(AB-BC-CA-AB),三相单双六拍(A-AB-B-BC-C-CA-A),以此推类。
三种方式的区别
单四拍(一相励磁):由于在转换过程中每次只有一相绕组通电,转子容易在平衡位置附近振荡,稳定性不佳,较少使用。
双四拍(二相励磁):每次转换过程中有两相绕组通电,输出转矩大,振动小,但功耗大。双四拍和单四拍完全等价。
四相单双八拍(一二相励磁):步距角小于四拍,速度是四拍的一半,精度更高,且在转换过程中始终有一个绕组通电,工作稳定,运转平滑。
步进电机驱动器有三种基本的步进电机驱动模式:整步、半步、细分。以常规二、四相,转子齿为50齿电机为例,四拍运行时步距角为θ=360度/(504)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(508)=0.9度(俗称半步)。
步进电机最好不使用整步状态,整步状态时振动大
4步进电机的使用时的相关问题
4.1步进电机启动时抖动而没有转动
遇到这个问题时我也上网查了很久,因为电机本身是好的,最后得出结论:输入的脉冲频率过高。
步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。在有负载的情况下,启动频率应更低。如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。
一些步进电机(BYJ系列电机)由于带有减速装置(减速比为1/64时,电机转64圈,外部的输出轴才转一圈,此装置的目的是增大扭矩),转速更慢,特别是看惯了直流电机以后,几秒才转过一圈,但这可能是它的正常转速,因此不要因为觉得它转速异常而盲目提高它的转速。
4.2步进电机的力矩随转速的升高而下降
当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。
http://blog.sina.com.cn/s/blog_6035432c0100ha1f.html 步进电机 28BYJ-48介绍和驱动及编程
4.3步进电机转动时的振动和噪声
步进电机低速转动时的振动和噪声是其固有特点,通常只能靠更换步进电机(步距角更小)或驱动器(带细分)解决。
总结
步进电机应用于低速场合—每分钟转速不超过1000转,可通过减速装置使其在此间工作,此时电机工作效率高,噪音低。
https://wenku.baidu.com/view/aea369ab172ded630b1cb6a0.html 步进电机28BYJ(个人总结版)
网络上收集到的很棒的个人总结。
5驱动器说明[^1]
以两相步进电机驱动器为例。

5.1输入输出端说明
1.信号输入端
共3路:
PUL+:脉冲信号输入正。
PUL-:脉冲信号输入负。
——
DIR+:电机正、反转控制正。
DIR-:电机正、反转控制负。
——
EN+:电机脱机控制正。
EN-:电机脱机控制负。
关于脱机功能(EN):
打开脱机功能后,电机转子处于自由不锁定状态,可以轻松转动,此时输入脉冲信号不响应,关闭此信号后电机接受脉冲信号正常运转。
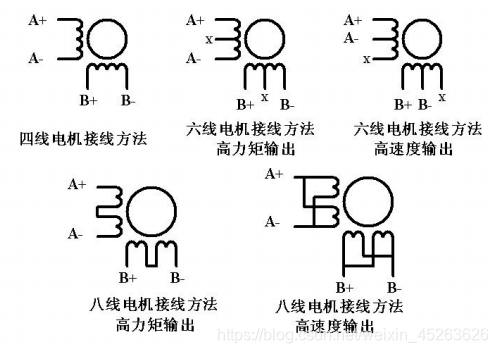
2.电机绕组连接
A+:连接电机绕组A+相。
A-:连接电机绕组A-相。
B+:连接电机绕组B+相。
B-:连接电机绕组B-相。
3.电源电压连接
VCC:电源正端“+”
GND:电源负端“-”
4.拨码开关
驱动器机身上通常绘制有两张表(见上图),表一为Current Table(电流表),可通过配置相关的拨码开关切换驱动器输出电流;表二为Pulse/rev Table(脉冲/转 表),可通过配置相关的拨码开关切换电机一转所需脉冲数。
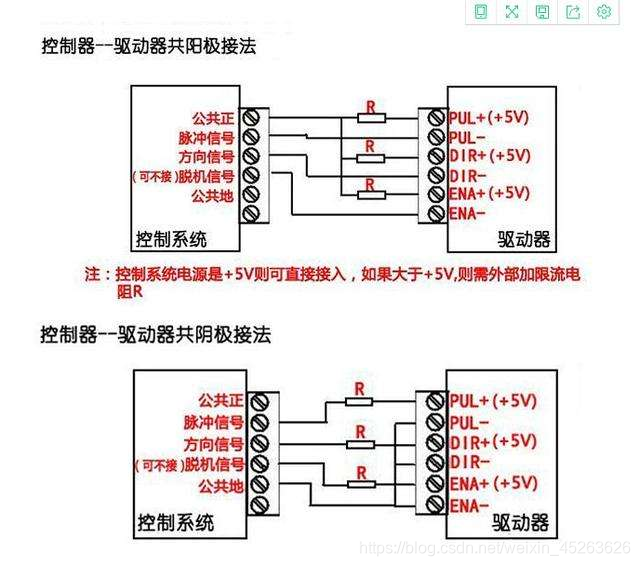
5.2驱动器接线
5.2.1输入端接线
输入信号接口解法有共阳极接法和共阴极接法。
5.2.2输出端(电机)接线
[^1]:全部摘自:TB6600升级版驱动说明
附录 步进电机种类及其命名规则
步进电机从其结构形式上可分为反应式步进电机(Variable Reluctance,VR)、永磁式步进电机(Permanent Magnet,PM)和混合式步进电机(Hybrid Stepping,HS).
0我国步进电机型号的命名规则
此处为旧版规则
步进电机型号中的字母通常代表拼音首字母。
BYG代表:步、永、感。步:是指步进电机;永:是指永磁磁钢;感:是指感应子(或叫感应线圈)。
BY代表:步、永。步:是指步进电机;永:是指永磁磁钢。
BYJ代表:步、永、减。步:是指步进电机;永:是指永磁磁钢;减:是指减速型。
BC代表:步、磁。步:是指步进电机;磁:是指磁阻。
BX代表:步、线。步:是指步进电机;线:是指直线。
故:
- BYG通常指混合式步进电机;
- BY通常指永磁式步进电机;
- BYJ通常指永磁式减速步进电机;
- BC通常指反应式步进电机;
- BX通常指直线式步进电机。
1反应式步进电机(VR)
是一种传统的步进电机,由磁性转子铁芯通过与由定子产生的脉冲电磁场相互作用而产生转动。
其结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。在我国所采用的步进电机中以反应式步进电机为主。
75BC380

75表示此步进电机的有效最大外径为75毫米;BC表示该步进电机为反应式步进电机;3代表三相相电机;80代表转子是80个齿。
2永磁式步进电机(PM)
利用线圈电流方向产生磁场与转子磁场相互排斥,从而使电机正转/反转。
永磁式步进电机的特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大。
24BYJ48-12V
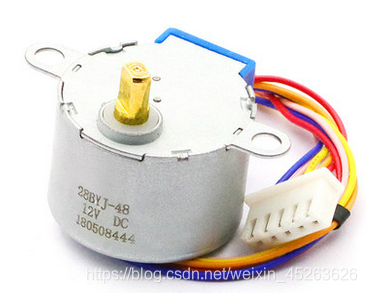
非常经典的一款步进电机, 24表示此步进电机的有效最大外径为24毫米;BYJ表示该步进电机为永磁式减速步进电机;48表示四相八拍;12V表示额定直流电压为5V。
3混合式步进电机(HS)
混合式步进电机综合了反应式和永磁式的优点,其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。最典型的是两相混合式步进电机。
57BYG250

57表示此步进电机的有效最大外径为57毫米;BYG表示该步进电机为混合式步进电机;2代表两相电机;50代表转子是50个齿。
4混合伺服电机
混合伺服电机并非伺服电机而属于步进电机范畴,即闭环步进,其特点在于加装了编码器,因而在外形上接近伺服电机(拥有动力线和编码线),但其性能劣于伺服电机。

混合伺服电机和混合式步进电机是两个完全不同的概念。

















 4798
4798

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









